
Fターム[5H301BB01]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 用途、移動体の種類 (1,798) | 農業用 (27)
Fターム[5H301BB01]に分類される特許
1 - 20 / 27
走行車両
【課題】旋回後の進入位置合わせを行える自動走行制御機能を備えた農業用の走行車両を提供すること。
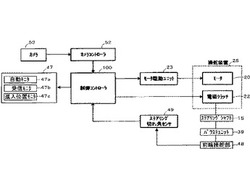
【解決手段】ステアリングハンドルに連動して正転と逆転をするステアリングシャフト15の切れ角を検出する切れ角センサ49と該シャフト15に回転駆動力を伝達するための正逆転モータ20とモータ20の回転駆動力をシャフト15に伝達するための電磁クラッチ22を有する連動機構を備えた自動操舵装置25とカメラ53で圃場内の遠目標X及び/又は作業軌跡Tを検出してモニタ47に表示可能とし、自動スイッチの「入」操作時時に、前記切れ角センサ49が所定量のシャフト切れ角を検出して車両の旋回が行われたと判断されると、モニタ47で表示される旋回後の遠目標Xの位置情報及び/又は作業軌跡Tの位置情報に基づき自動操舵装置25のモータ20を作動させて圃場内で直進走行の自動操舵を行う制御構成を有する制御装置100を備えた走行車両である。
(もっと読む)
自動走行車両及び自動走行車両の制御方法

【課題】走行経路の詳細な位置データやティーチングが不要であり、走行経路を設定する手間が大幅に軽減される自動走行車両を提供する。
【解決手段】本発明に係る自動走行車両1は、車両本体2と、少なくとも車両本体2の両側方に位置するオブジェクトを検知する検知部3と、車両本体2の動作パターンを記憶する記憶部と、車両本体2の動作を制御するコントローラであって、少なくとも、車両本体2の一の側方に位置するオブジェクトを中心とした弧を描くように車両本体2を走行させ、車両本体2の他の側方を通過するオブジェクトの個数をカウントし、カウントされた前記オブジェクトの個数に基づいて、前記動作パターンにしたがって車両本体2の動作を変更するコントローラと、を有する。
(もっと読む)
自律走行作業車の制御装置
【課題】走行予定領域において予め定められた走行パターンに従って走行すると共に、角速度センサの出力を適正に較正するようにした自律走行作業車の制御装置を提供する。
【解決手段】作業車の重心位置の鉛直軸回りに生じる角速度を示す出力を生じるYawセンサと車輪速を示す出力を生じる車輪速センサの出力に基づいて算出される進行方位と走行距離に基づき、走行予定領域において予め定められた走行パターンに従い、作業車を直進走行させつつ、作業させる走行作業制御において、直進走行のとき、予め定められた走行パターンで予定される予定走行距離L1と実走行距離L2の差が誤差許容値αを超えるか否か判定し(S10からS18)、差が誤差許容値を超えると判断されるとき、Yawセンサの出力の中心値を補正する(S22)。
(もっと読む)
作業車両の自動走行制御装置
【課題】自動走行による作業に必要な目標の数量を低減出来、その目標の設置の手間も低減出来る作業車両の自動走行制御装置を提供すること。
【解決手段】トラクタ1に設けられたカメラ部8と、カメラ部8により撮像される予め設置された遠目標200の画像情報に基づいて、直進走行を行う遠目標制御処理と、カメラ部8により撮像される作業の痕跡の画像情報に基づいて、倣い走行を行う倣い走行制御処理とを有する、トラクタ1の走行制御を行うカメラ制御部21及び車両制御部23とを備え、カメラ制御部21及び車両制御部23は、遠目標制御処理により直進走行を行わせた後、遠目標制御処理が解除され、トラクタ1が旋回された後、倣い走行制御処理により倣い走行を行わせる、トラクタ1の自動走行制御装置である。
(もっと読む)
自動耕作方法、及び自動耕作システム
【課題】農地における農作業を効率よく簡便に行えるようにする。
【解決手段】隣接配置された複数のアンテナを備える基地局200を農地4の近傍に設け、アンテナの夫々から無線信号を送信し、農機300に、情報処理装置と、アンテナの夫々から送信される無線信号の位相差に基づき自身の現在位置を標定する位置標定装置411とを設け、サーバ装置100に、農機300による農作業の対象となる農地4について、農機300が、直進走行、農地4の境界近傍での180°方向転換、及び当該方向転換前の当該経路から所定の間隔をあけての直進走行の再開、を順に繰り返し行うようにコースを生成し、生成したコースを農機300に送信し、農機300が、位置標定装置によって標定される現在位置と受信したコースとに基づきコースに沿って自律走行するようにする。
(もっと読む)
移動作業機の操縦制御装置
【課題】乗用型移動作業機の自動操縦を実現し、作業者の負担を軽減することを目的とする。
【解決手段】移動作業機に設置した1つの可動式方向測定装置と、2つの可動式距離測定装置により作業領域の周囲に設置した複数の案内支柱を検出して移動作業機の進路の基準とし、移動作業機の進行に伴って目標とする案内支柱を切り換えながら途切れることなく検出し、移動作業機に内蔵する演算制御装置が正しい進路を進行するよう移動作業機を制御することで、移動作業機の案内支柱の列に沿った前進、転回を自動操縦で行うことを可能とし、前記課題を克服する。
(もっと読む)
自動走行ルートガイドツールおよび自動走行装置
【課題】簡単に設置が可能で、かつ、安価な走行ガイドツールと、該ガイドツールを基に方向転換しながら予め決められたルートを自動走行可能な自動走行装置を提供する。
【解決手段】識別情報が記憶されたRFIDチップを内蔵した走行ルートガイドツールであって、前記走行ガイドツールの視認可能な面に走行をガイドすべき自動走行装置が方向転換する時に基準となる位置と方向を示す印が表示されているように構成した。自動走行装置は、RFIDリーダと、カメラと、カメラ画像分析部と、識別情報に対応づけられた方向情報と、画像分析の結果得られた方向情報を基に転換方向を確定する制御部と、方向転換操舵機構とを有するように構成した。
(もっと読む)
走行制御装置
【課題】車両が目標ランプに向かって自動的に走行するように制御する走行制御装置を提供する。
【解決手段】走行制御装置において、カメラは、車両走行の目標となる方向に位置する目標ランプを撮像する。画像処理部32は、カメラにより撮像した撮像画像を処理する。走行制御部36は、撮像画像に含まれる目標部画像の位置と車両の初期位置との関係で定まる目標走行ラインを走行するように車両の走行を制御する。ヨー角検出部42は、撮像画像から目標部に対する車両のヨー角を検出する。横偏差算出部50は、撮像画像から目標走行ラインからの横偏差を算出する。走行制御部36は、ヨー角および横偏差にもとづいて車両の走行を制御する。
(もっと読む)
自律走行車の走行システム
【課題】設置費用の低減及び設置作業の簡素化ができる自律走行車の走行システムを提供する。
【解決手段】第1磁石21を保持する第1ホルダと第2磁石22を保持する第2ホルダが一体形成された走行経路杭1を走行経路基準線Waと直交する状態で間隔を有して連続的に地中に埋設する。自律走行車に設けた一対の第1磁気センサ45及び第2磁気センサ46により第1磁石21及び第2磁石22の磁気検知を行い、その結果に基づいて操舵制御手段で操舵し、走行経路基準線Waに沿って走行する。そのため、埋設される走行経路杭1の間隔が比較的大きく離間して配置しても自律走行車の走行が抑制される。これにより埋設される走行経路杭1を削減でき、走行経路杭の設置費用の低減及び設置作業の簡素化が可能になる。
(もっと読む)
遠隔操作システムおよび遠隔操作装置
【課題】不慣れな操作者でも移動体を容易に遠隔操作できる遠隔操作システムおよび遠隔操作装置を提供する。
【解決手段】遠隔操作システム10に含まれる遠隔操作装置14のCPU44は、移動体12からの過去情報および最新の移動体情報に基づいて過去情報を選択し仮想視点Vを決定する。CPU44は、グローバル座標系GCに、選択された過去情報に基づいて3次元環境画像Kと仮想視点Vとを生成し、最新の移動体情報と移動体モデルMに関するデータとに基づいて移動体モデルMを生成し、最新の移動体情報と操舵ユニット52からの入力量とに基づいて第1補助モデルM1と第2補助モデルM2とを生成する。そして、CPU44は、3次元環境画像Kと移動体モデルMと第1補助モデルM1と第2補助モデルM2とを仮想視点Vから切り出し中心点Q方向に透視投影して合成画像を生成し、当該合成画像をモニタ36に表示する。
(もっと読む)
自律移動装置
【課題】領域の塗り潰しを行う自律移動装置において、走行領域の形状に柔軟に対応して自然な移動で効率的に走行領域を塗り潰し可能とする。
【解決手段】自律移動装置の経路生成手段は、走行領域2を規定する2つの境界縁3と走行領域2における4つの領域定義点P0〜P3による2つの線分4とで囲まれた閉領域20が指定されると、閉領域20を所定の掃引幅Wで走行して塗り潰すために、線分4に沿って、既定の仮目的地P0〜P3に加え追加の仮目的地a,b(総称してK)を設定し、各仮目的地Kを経由するように経路Rを生成する。閉領域20は、当該閉領域の境界に位置する複数の領域定義点P0等によって走行領域2に柔軟に設定でき、領域定義点P0等を結んで成る線分と、状況に応じて援用される境界縁3とで囲まれた領域として定義される。自律移動装置は、仮目的地Kの位置を認識しつつ安定に塗り潰し移動できる。
(もっと読む)
作業車の走行制御装置
【課題】 煩わしさの少ない簡単な作業で作業対象領域における自動操向制御用の設定経路を設定することが可能となる作業車の走行制御装置を提供する。
【解決手段】 GPS位置情報算出手段100にて求められる車体の位置情報に基づいて車体が作業対象領域内の設定経路に沿って走行するように操向手段を自動的に操作する自動操向制御を実行する制御状態と自動操向制御を実行しない非制御状態とに切り換え自在な自動操向制御手段JSが、非制御状態において経路設定モードに切り換えられると、車体が操向操作具にて操向手段が操作され且つ作業対象領域の周縁部に沿って移動するときのGPS位置情報算出手段100にて求められる複数の車体の位置情報を記憶し且つ記憶された複数の車体の位置情報に基づいて作業対象領域を特定してその特定した作業対象領域に基づいて設定経路を自動設定する経路設定処理を実行する。
(もっと読む)
作業車の走行制御装置
【課題】 GPS位置情報算出手段やジャイロ装置の検出状態が適正であるか否かを外部から識別可能にして、極力煩わしさの少ない状態で監視することが可能となる作業車の走行制御装置を提供する。
【解決手段】 GPS位置情報算出手段100にて求められる車体の位置情報及びジャイロ装置57にて検出される車体の方位変位情報がいずれも適正に検出されている適正検出状態であるか少なくともいずれか一方が適正に得られていない不適正検出状態であるかを判別する検出状態判別手段103と、前記適正検出状態であることが判別されているときと前記不適正検出状態であることが判別されているときとで表示内容を異ならせる形態で、且つ、車体外方から表示内容を目視可能な状態で判別結果を表示する判別状態表示手段78とが備えられる。
(もっと読む)
作業車の走行制御装置
【課題】 GPS位置情報算出手段により求められる車体の位置情報を有効に利用することで、低コストのジャイロ装置を用いてコスト低減を図ることを可能にしながらも、設定経路に沿う操向制御を極力良好に行えるようにする。
【解決手段】 車体の位置情報を求めるGPS位置情報算出手段100、車体の方位変位情報を検出するジャイロ装置57、ジャイロ装置57にて車体の方位変位情報が適正に検出されているジャイロ情報適正状態であるか適正に検出されていないジャイロ情報不適正状態であるかを判別するジャイロ情報判別手段103が備えられ、ジャイロ情報適正状態であることが検出されると、GPS位置情報算出手段100による車体の位置情報及びジャイロ装置57による車体の方位変位情報に基づいて操向制御し、且つ、ジャイロ情報不適正状態であることが検出されると、GPS位置情報算出手段100による車体の位置情報のみに基づいて操向制御する。
(もっと読む)
第1の農業機械と並行して田畑一面を走行するように操縦することができる第2の農業機械を操縦するための方法および装置
本発明は、第1の農業機械(10)に対して相対的に、田畑(34)一面で操縦することができる第2の農業機械(12)を操縦するための方法および装置に関し、
距離計(60)であって、農業機械(12)の1つの上に搭載され、水平領域にわたる隣接した対象物の方向および距離に関する測定値を記録するように動作することができる、距離計(60)と、
評価手段(68)であって、距離計(60)に接続され、操縦信号を出力するように設計され、その操縦信号は、距離計(60)の測定値に基づき、第1の機械(10)に対して相対的に第2の機械(12)を誘導する、評価手段(68)とを備える。
評価手段(68)は、距離計(60)によって時間的に連続して記録された、複数の測定値を参照して、記録された測定値から、距離計(60)を備えていない機械(10)に割り当てることができる測定値を選択し、そして選択された測定値を使用して、操縦信号を生成するように、動作することができることが提案されている。 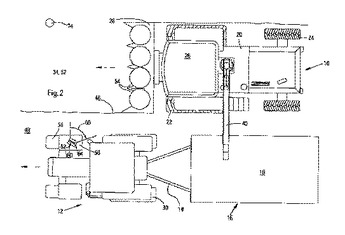 (もっと読む)
(もっと読む)
飼料移動のための無人走行車両
地面に置かれた飼料(3)を水平に移動させるための無人走行車輌(1)は、別々の駆動手段により別々に駆動される二つの車輪と、その車輌から壁部への距離を測定する距離測定手段(6)と、その壁部に対する車輌の中心線の向きを測定する向き測定手段(9)と、車輪間のトルク差を測定するトルク差測定手段(10)と、その車輌を走行方向に移動するよう制御する制御装置(11)と飼料(3)を水平に移動させる飼料移動手段と、を備え、前記制御装置(11)が、動作中に前記距離測定手段(6)により測定された壁部までの距離を、初期設定の最小距離以上に維持するようプログラムされ、さらに、飼料移動手段の最下点(19)の高さと又は位置を調整する調整装置を備えている。  (もっと読む)
(もっと読む)
自律移動装置
【課題】作業用の自律移動装置において、簡単な構成により、ユーザの思惑に違わない作業結果を実現可能とする。
【解決手段】自律移動装置1は、作業エリアと作業内容とに関するユーザからの作業指示に基づいて作業エリアまで自律的に移動して作業を行うため自己の各部を制御する制御手段2と、ユーザからの作業指示を受け取ると共にユーザに応答を表示する操作インターフェイス3とを備え、制御手段2は、操作インターフェイス3を介して作業指示が入力されると、作業エリアまでの移動時間とその作業エリアにおける作業時間とを見積もることにより作業指示に関する作業の遂行に必要な所要時間を推定し、その推定結果を操作インターフェイス3を介してユーザに提示する。制御手段2は、作業の遂行に必要な所要電力量を見積もり、電池残量検知手段4によって検知された電池10の残電力量と比較し、その比較結果をユーザに提示する。
(もっと読む)
車両自動ガイダンスメモリ
車両自動ガイダンスにおいて使用するためのオンボード・メモリのための方法および機器を開示する。車両のオンボード・メモリは、その特定の車両および/または車両のクラスに特有の自動ガイダンスにおいて使用される情報を記憶し、その情報を車両通信ネットワークを介して受け渡すことが可能である。次いで、その情報は、車両の自動ガイダンスを支援するために、取外し可能なマスタ・コントローラおよび/または取外し可能な衛星測位受信機に転送される。このようにして、マスタ・コントローラおよび/またはGPSユニットは、車両から取り外され、かつ/または車両に再設置されることが可能であり、車両特有の情報を記憶する必要がない。  (もっと読む)
(もっと読む)
移動体及び移動体の走行方法
【課題】 制御性が良い走行軌道をオンボードで生成することによって、移動体の制御がスムーズになり高精度の走行を可能とすると共に、あらかじめ地図や軌道作成などの付帯作業の必要がなく、安価で応用性が高い移動体を提供する。
【解決手段】 移動した移動軌跡を記憶する記憶手段と、前記記憶手段に記憶された移動軌跡を編集して自走行軌道を生成する走行軌道生成手段と、前記走行軌道生成手段により生成された自走行軌道に基づいて走行する走行手段と、前記走行手段により実際に走行した軌道である自走行軌跡と、前記走行軌道生成手段により生成された自走行軌道とに基づいて、前記自走行軌跡と前記自走行軌道との誤差が少なくなるように、前記走行手段に補正値を与える走行誤差補正手段とを備える。
(もっと読む)
車両
【課題】信頼性が高くかつ利便性のよい車両を提供する。
【解決手段】車両10は、自動/手動の走行モードを設定するための切り替えボタン42aおよびリモコン100、走行モードに対応したマスク制御信号を出力するマイコン78、走行モードに対応したマスク制御信号を出力させるための指示をマイコン78に入力する指示制御ユニット64、障害物を検出しかつ検出信号を出力する前方障害物センサ58aおよび後方障害物センサ58b、ならびにマイコン78からのマスク制御信号および障害物センサ58a,58bからの検出信号に基づいて車両10の非常停止の要否を示す非常停止制御信号を生成する第1論理回路66を備える。第1論理回路66からの非常停止制御信号に基づいて車両10の非常停止動作が制御される。
(もっと読む)
1 - 20 / 27
[ Back to top ]