
Fターム[5H301DD05]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 移動体への指令の設定方法、設定手段 (1,386) | 移動中に外部から与えられるもの (484)
Fターム[5H301DD05]の下位に属するFターム
手動操縦によるもの(リモコン) (159)
固定設置された装置から与えられるもの (195)
他の移動体から与えられるもの (27)
Fターム[5H301DD05]に分類される特許
21 - 40 / 103
安全制御システムおよび安全制御方法
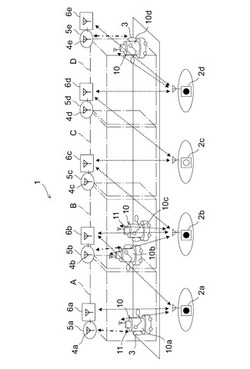
【課題】 設備内に進入する移動体を無線で安全に制御できるようにする。
【解決手段】 安全制御システム1において、制御対象領域A〜Dにそれぞれ対応して設置され、無線により移動ロボット10を停止させるための停止スイッチ2a〜2dと、制御対象領域A〜Dに進入する移動ロボット10を検知するアンテナ4a〜4eと、各アンテナ4a〜4eで検知された移動ロボット10に対して停止スイッチ2a〜2dを有効にするとともに、停止スイッチ2a〜2dの操作に基づいて当該停止スイッチに対応する移動ロボット10を停止させるよう制御する制御部とを設ける。この場合には、移動ロボット10の進入の度に当該移動ロボット10が検知されて、停止スイッチ2a〜2dが当該移動ロボット10に対して有効にされるので、制御対象領域内に進入する移動ロボットを無線で安全に制御できるようになる。
(もっと読む)
移動型の搬送物受渡し装置

【課題】移動型の搬送物受渡し装置において、簡単な構成により、移動可能な位置に任意に配置されたステーションの固定された載置台に対して、柔軟な搬送物であっても、搬送物の受取りまたは置渡しを行うことを可能とし、かつ、ステーション間で搬送を行うことを可能とする。
【解決手段】本装置1は、搬送物Mが載置される上下動可能な、櫛歯状部材21を有した移載部2と、移載部2を上下動させる駆動部3とを備える。移載部2は、ステーションSTにおける櫛歯状部材51を有した載置台5に対して両者の櫛歯状部材21,51が互いに噛み合わせ可能なように構成されている。制御部10は、両櫛歯状部材21,51が前後方向において互いに噛み合わせ可能な位置に装置1を移動させ、さらにステーションSTに接近させて移載部2を載置台5に噛み合わせた状態とし、移載部2の上動または下動によって搬送物Mの受渡しを行う。
(もっと読む)
移動体および操作方法
【課題】本発明は、安全性を確保して容易に操作できる移動体を提供する。
【解決手段】路面上を移動するための車輪と103、前記車輪103を駆動する駆動装置と、前記駆動装置を制御する制御装置と、前記制御装置に操作者104が所望の移動指令を与えるための操作装置102と、全体を覆う外装105とを備えた移動体101において、前記操作装置104は、前記外装105のうち前記路面に略平行な上面部に配置されるものである。
(もっと読む)
追従制御装置及び追従制御方法
【課題】追従性を向上した追従制御を課題とする。
【解決手段】車両1に対する移動目標としての電波発信源8の位置を推定し、推定した電波発信源8の位置に向かうように車両1の移動を制御する追従制御する技術である。上記車両1に対し平面視で互いに重ならない位置に複数の無線通信手段を設定して、上記電波発信源8からの電波の受信に基づき、各無線通信手段から電波発信源8までの各相対距離を取得する。取得した複数の相対距離から、車両1に対する電波発信源8の相対位置情報を推定する。そして、推定した相対位置情報に含まれる誤差が小さなる領域に、車両1の移動すべき方向を設定する。
(もっと読む)
自動搬送車及びその自動搬送車を使用する自動搬送車運行システム
【課題】様々な作業記号を明示した搬送指示ラインに沿って自動走行する自動搬送車及びその自動搬送車を使用する自動搬送システムを提供する。
【解決手段】部品等を運搬する台を載置可能なフレーム1と、フレーム1の下面に走行面を撮影可能に取り付けられる撮影機2と、撮影機2からの画像信号を受信して画像処理を行う画像処理ユニット3と、画像処理ユニット3から画像処理信号を受信し駆動車輪5を駆動させる駆動モータ6と駆動車輪5の走行方向を回転させるステアリング7とへ制御信号を送る制御ユニット4とを有する。
(もっと読む)
強化された登り機能を備えた二輪式ロボット
ロボットは、二つの車輪の間に配置されたシャーシ内に埋設される電子監視システムを備える。車輪は、本体および複数の接地部を備える。接地部は、一般に、本体の周りに半径方向に沿って配置されると共に、本体の外側部分から、遠位方向に延びている。本体は、一般に、複数の圧縮セルを画定すると共に、実質的に円錐台形状の外面を有する。  (もっと読む)
(もっと読む)
搬送車システム
【構成】 搬送指令で荷すくいするロードポートに最初に到着予定の搬送車が実荷で、かつ荷すくいするロードポートへの到着前に荷下ろし予定の場合、最初に到着予定の搬送車の後方所定距離内に空荷の搬送車が存在する際に、空荷の搬送車に搬送指令を割り付け、後方所定距離内に空荷の搬送車が存在しない際に、最初に到着予定の搬送車に搬送指令を割り付ける。
【効果】 最初に到着予定の搬送車が荷すくいする間、後方の空荷の搬送車が停止する無駄を解消できる。また荷すくいするロードポートの下流側では、空荷の搬送車が先行し、実荷の搬送車が後行するので、荷すくいに空荷の搬送車を割り当てることができる。
(もっと読む)
同軸二輪車及びその制御方法
【課題】安定して旋回動作を実行可能な同軸二輪車及びその制御方法を提供すること。
【解決手段】本発明にかかる同軸二輪車は、同軸に配置された二輪を駆動する駆動手段と、旋回指令を入力する旋回指令入力手段と、前記旋回指令入力手段により入力された旋回指令に基づき旋回ゲインに応じて前記駆動手段を制御して旋回動作を実行させる制御手段とを備えた同軸二輪車であって、前記制御手段は、後ろ方向への速度が第1の速度以上の後進状態にある場合に前記旋回ゲインを実質的にゼロとし、かつ車両の速度が実質的にゼロの場合に当該旋回ゲインをゼロよりも大きい値に設定するものである。
(もっと読む)
無人搬送装置とその搬送経路決定方法
【課題】搬送経路を自動決定することができ、搬送機器の詳細な位置や通過時間を監視する必要がなく、そのためのセンサ、通信路、および計算装置が不要であり、精度の高い予測が不要であり、混雑予測に失敗しても適切な経路を選択することができ、かつ省エネルギー化を図ることができる無人搬送装置とその搬送経路決定方法を提供する。
【解決手段】記憶装置17により、搬送機器11の乗り換え地点、分岐地点、合流地点、搬送元、搬送先を「点」、各点から直接移動できる隣接地点までを「枝」、各枝の通過時間に比例する「時間負荷」と消費エネルギーに比例する「エネルギー負荷」の和を「重み」とするグラフを記憶し、搬送制御装置18により、各物品毎に、搬送元から搬送先までの搬送経路を構成する各枝の重みの総和が最小となる経路を「予定経路」として決定する。
(もっと読む)
移動体および環境情報作成方法
【課題】移動しつつ環境情報を作成する移動体において、移動中に生じる振動等の影響を受けずに、周囲の環境情報を正確に作成することを可能にすること。
【解決手段】移動体本体と、周囲に存在する物体の前記移動体本体からみた相対位置を示す計測値を取得するセンサと、前記移動体本体に作用する加速度を検出する加速度検出部とを備えた移動体において、センサの取得した計測値に基づいて、移動領域に存在する物体の形状や位置を示す環境情報を作成する際に、センサが計測を行ったときの移動体本体の目標加速度と、前記加速度検出部により検出された加速度との大きさとの差を算出し、算出した差に基づいてセンサにより得られた計測値の信頼性を決定するとともに、その決定された信頼性に基づいて前記計測値を修正し、修正後の計測値に基づいて環境情報を作成するようにした。
(もっと読む)
ロボット位置検出システム
【課題】 遠隔操作するロボットの位置および方向をディスプレイ上で確認でき、必要に応じてロボットの表示位置および方向を修正できるようにする。
【解決手段】
ロボット10は、走行体11と、走行体11に回動可能に搭載されたビデオカメラ12と、モータエンコーダ15と、角速度センサ16とを有している。遠隔制御装置20のディスプレイ22は、ビデオカメラ12からの映像を表示し、かつ障害物のマップを表示し、ロボット10の位置および方向を示すマークをリアルタイムで表示する。ロボット10の位置および方向は、モータエンコーダ15と、角速度センサ16の情報に基づいて積分演算を行うことにより得る。このロボットの表示位置および方向は、修正することができる。
(もっと読む)
搬送システム、及び搬送システムの制御方法
【課題】搬送システムにおいて、簡単な構成で、確実に搬送車同士が衝突してしまうことを防止する。
【解決手段】搬送システムは、合流箇所を有する軌道(100)と、軌道を夫々走行する複数の搬送車(210、220)と、搬送車の走行方向を基準として、軌道のうち少なくとも合流箇所の手前にある二つの軌道部分の各々の左側の縁に設けられた左部及び右側の縁に設けられた右部を有し、二つの軌道部分の一方における左部及び他方における右部間並びに一方における右部及び他方における左部間で、信号を伝達可能な伝達手段(310、320)とを備える。搬送車は、信号を右部及び左部の一方を介して送信する送信手段(410、420)、並びに信号を右部及び左部の他方を介して受信する第1受信手段(510、520)及び信号を右部及び左部の一方を介して受信する第2受信手段(610、620)を備える。
(もっと読む)
搬送システム、配車管理装置及び方法、並びにコンピュータプログラム
【課題】ビークル等の搬送車を用いた搬送システムにおいて、配車を効率的に行う。
【解決手段】搬送システム(100)は、被搬送物に対して各種処理を施す作業装置(3)を含んで夫々構成される複数の集合の各々の内部及び該複数の集合の相互間で、被搬送物を搬送する。搬送システムは、複数の搬送車(2)と、前記内部及び前記相互間で搬送車を移動させる移動手段(11)と、将来の一時点又は時期において前記内部の各々で被搬送物を搬送するために要求される予定の複数の搬送車の台数を特定する予定台数特定手段(4)と、該特定された台数に基づいて、搬送車を前記相互間で移動させるように、移動手段を制御する制御手段(6)とを備える。
(もっと読む)
経路探索システム及び方法、搬送システム、並びにコンピュータプログラム
【課題】経路探索システムにおいて、取り扱うデータ数及び演算負荷を低減しつつ、最適経路を探索する。
【解決手段】経路探索システム(100)は、被搬送物を搬送するための搬送車(2)を該搬送車の経路上で出発地点から目標地点まで移動させる際の最適経路を探索する。経路探索システムは、複数の作業装置を含んで構成される集合を少なくとも一つ含む複数の集合の各々をノードとし且つ該複数の集合の相互間をリンクとして規定される、搬送車の移動コストを格納する格納手段(9)と、格納された移動コストに基づいて、最適経路の少なくとも一部を、複数の集合を結ぶ単位で探索する経路探索手段(6)と、探索された少なくとも一部と、複数の集合のうち前記探索された少なくとも一部に含まれる一又は複数の集合の内部に存在する前記経路の部分とを統合することで、最適経路を特定する経路特定手段(7)とを備える。
(もっと読む)
搬送制御装置
【課題】軌道上に複数の搬送車を走行させてステーション間で物を搬送する搬送システムにおいて、複数の搬送車の連携動作を制御することにより、搬送システム全体の搬送効率を向上させる。
【解決手段】位置情報取得手段302により得られた搬送車301F、301Gの位置情報及び作業状態監視手段により得られた作業状態に基づいて、先行搬送車301Fがステーション200Aに停車して搬送物の受け渡しをしており、且つ、当該先行搬送車301Fと後行搬送車301Gとの間隔が設定値以下になったと判断したとき、搬送車301Gの搬送物の属性情報に基づいて、後行搬送車301Gに、先行搬送車301Fが停車しているステーション200Aを搬送先とする搬送物が積載されているか否かを判断し、積載されている場合には、先行搬送車301Fに対して搬送物の受け渡しを中止させて次のステーション200Cに移動させる制御を行う。
(もっと読む)
遠隔監視システム
【課題】 監視員の確認負担を軽減した移動ロボットの遠隔監視システムの提供。
【解決手段】 移動ロボットは、検知部が異常を検知すると記憶部に異常状態を記憶させる異常判定手段と、検知部が異常を検知すると異常情報を監視センタに送信する通信制御手段と、記憶部の異常状態を解除する復旧処理を実行する復旧処理手段と、を備え、監視センタは、自動復旧を禁止すべき異常を識別するための設定情報を記憶したセンタ記憶部と、自動復旧モードを含む複数の動作モードを管理するモード設定手段と、異常情報を受信したときに動作する報知部と、動作モードが自動復旧モードであるときに、自動復旧禁止異常以外の異常情報を受信すると、報知部の動作を禁止して移動ロボットに復旧処理を実行させる自動復旧制御手段と、を備える。
(もっと読む)
遠隔監視システム
【課題】 監視員の確認負担を軽減した移動ロボットの遠隔監視システムの提供。
【解決手段】 監視区域の異常を検知する移動ロボットであって、 監視センタと通信する通信部と、監視区域の異常を自動復旧禁止異常か自動復旧禁止異常以外の異常かを識別可能に設定した設定情報および前記監視区域の現状態を記憶する記憶部と、異常を検知すると記憶部に異常状態を保持させる異常処理手段と、異常を検知すると監視センタに異常信号を送信する通信制御手段と、自動復旧モードを含む複数の動作モードを管理するモード設定手段と、動作モードが自動復旧モードであるときに、自動復旧禁止異常以外の異常が検知されると、当該異常信号の送信を禁止するとともに当該異常状態を解除するための復旧処理を実行する復旧処理手段とを備える。
(もっと読む)
遠隔監視システム
【課題】 監視員の確認負担を軽減した移動ロボットの遠隔監視システムの提供。
【解決手段】 移動ロボットは、現在位置を検出する位置検出部と、検知部が異常検知すると記憶部に異常状態を記憶させる異常判定手段と、検知部の異常検知に基づく異常情報及び現在位置を監視センタに送信する通信制御手段と、記憶部の異常状態を解除する復旧処理を実行する復旧処理手段とを備え、監視センタは、重要エリアを記憶するセンタ記憶部と、自動復旧モードを含む複数のモードを管理するモード設定手段と、移動ロボットから異常情報を受信すると動作する報知部と、移動ロボットの現在位置と重要エリアを比較する位置比較手段と、自動復旧モードであるときに重要エリア外で検知された異常情報を受信すると、報知部の動作を禁止して移動ロボットに復旧処理を実行させる自動復旧制御手段とを備える。
(もっと読む)
自律移動型ロボットの特定位置誘導制御方法
【課題】本発明は、自律移動型ロボットが滑らかな動作で任意の場所に、任意の方向から任意の向きで進入することができる自律移動型ロボットの特定位置誘導制御方法を提供することを目的とする。
【解決手段】自律移動型ロボットの特定位置誘導制御方法であって、自律移動型ロボットを移動させる移動ステップと、自律移動型ロボットの周囲の状況を撮影する撮像ステップと、特定位置の上方に設けられたマーカを抽出するマーカ抽出ステップと、撮像ステップにて撮影された撮像画像をもとに前記特定位置の方向を算出する方向算出ステップと、撮像画像をもとに前記自律移動型ロボットと前記特定位置の間の距離を算出する距離算出ステップと、撮像画像をもとに前記自律移動型ロボットと前記特定位置の該ロボット進入する姿勢方向を算出する姿勢方向算出ステップと、を有しており、自律移動型ロボットを前記特定位置の特定の方向から進入させることを特徴とする。
(もっと読む)
移動体、及びその制御方法
【課題】音源に対して確実に近づくことができる移動体、及びその制御方法を提供すること。
【解決手段】
本発明の一態様にかかる移動体は、目標停止位置まで自律移動する移動体100であって、移動体100の外部で発生した音の前記移動体に向かう方向を特定するマイクロフォンアレイ121と、移動体100が移動する領域に応じて記憶されている地図データにおいて、音源の候補となる音源候補対象の位置を記憶する音源候補対象記憶部52と、音源の方向と、音源候補対象の位置とに基づいて、音源の位置を推定する音源位置推定手段12と、推定された音源の位置から目標停止位置を決定する停止位置決定手段13と、移動体の現在位置から目標停止位置まで移動体100を移動させる駆動制御部16と、を備えるものである。
(もっと読む)
21 - 40 / 103
[ Back to top ]