
Fターム[5H301DD08]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 移動体への指令の設定方法、設定手段 (1,386) | 移動中に外部から与えられるもの (484) | 他の移動体から与えられるもの (27)
Fターム[5H301DD08]に分類される特許
1 - 20 / 27
自動追尾式自走台車
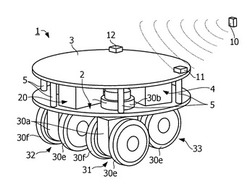
【課題】差動式キャスタを備えた自走台車において、自動追尾機能を有する自動追尾式自動台車を提供する。
【解決手段】自動追尾式自走台車1は、差動式キャスタ(31,32,33)と、自動追尾装置と、を備える。差動式キャスタ(例えば、31)は、互いに独立して回転駆動する第1および第2の駆動輪(30e,30f)を有し、台車本体2に対して駆動方向を自在に可変することができる。そして、自動追尾装置は、被追尾体Pに対する台車1の距離および角度に関する情報を検出する検出手段(11,12)と、検出手段(11,12)により検出された情報に基づき台車1が走行すべき方向、および走行または停止を決定するとともに、決定された情報に基づき差動式キャスタ(31,32,33)に制御電流を供給する制御装置20と、を備える。
(もっと読む)
有軌道台車システム

【課題】有軌道台車システムにおいて、台車の不要な速度低下や走行停止を抑制する。
【解決手段】有軌道台車システムは、分岐点及び合流点を含む所定領域内に誘導線(600)を有する軌道(100)と、軌道を走行する複数の台車(200)と、誘導線管理装置(700)とを備える。複数の台車の各々は、送信部及び受信部(910,920)と、走行制御部(205)とを備える。誘導線管理装置(700)は、誘導線受信部及び誘導線誘導線送信部(710,720)と、特定台車(250)の第1の無線信号受信部(930)に対して無線信号を送信可能な第1の無線信号送信部(740)とを備えており、一の誘導線領域に一の特定台車を優先させて進入させる場合に、一の誘導線にブロッキング信号を送信すると共に、一の特定台車に対して一の誘導線領域内への進入を許可する許可信号を送信する。
(もっと読む)
搬送システム
【課題】搬送車両の充電作業が搬送作業に与える影響を従来よりも低減すると共にバッテリの大型化を抑制する。
【解決手段】蓄電池によって駆動され、電力を外部から受電及び外部に給電する複数の搬送車両3と、搬送車両3が走行する複数の走行軌道1A,1Bと、ある走行軌道1Aと他の走行軌道1Bとが隣接するエリアであって、ある走行軌道1Aを走行する搬送車両3と他の走行軌道1Bを走行する搬送車両3とが給電/受電する受給電エリアKa,Kbとを具備する。
(もっと読む)
搬送用走行体の走行制御方法
【課題】走行速度可変の自走式搬送用走行体1を作業区間WAに一定の作業速度VLまで減速させた状態で進入させること。
【解決手段】各搬送用走行体1には、前後に隣り合う搬送用走行体1間でデータ通信を行うデータ通信手段13,14が設けられ、作業区間WAの上手側走行経路中には、計測起点P1が設定され、作業区間WAへ高速で接近する後ろ側搬送用走行体1Zとその前方の作業速度VLで走行する前側搬送用走行体1Yには、計測起点P1からの走行距離に相当する現在位置情報を持たせ、後ろ側搬送用走行体1Zでは、自体の現在位置情報と前記データ通信手段を介して受け取った前側搬送用走行体1Yの現在位置情報とに基づいて前側搬送用走行体1Yとの間の距離を演算させると共に当該距離の漸減変化に基づいて減速制御を行わせ、前記距離が設定値に達したドッキング完了時に後ろ側搬送用走行体1Zが作業速度VLで自走しているように制御する。
(もっと読む)
搬送用走行体の走行制御方法
【課題】地上側から作業区間WA内の全ての搬送用走行体1に対して走行可信号を確実に伝送する手段のコストダウン、実施の容易化を図る。
【解決手段】各搬送用走行体1には、作業区間WA内において前後に隣り合う搬送用走行体1間でデータ通信を行うデータ通信手段13,14と、地上側通信装置との間でデータ通信を行う機上側通信装置15が設けられ、前記作業区間WAの一端部には、通過する搬送用走行体1の前記機上側通信装置15に走行可信号を送信する地上側通信装置18a,18bが配設され、この地上側通信装置18a,18bから受信した走行可信号を、作業区間WA内を走行する他の全ての搬送用走行体1に前記データ通信手段13,14を介して伝送し、作業区間WA内の各搬送用走行体1を、受信した走行可信号に基づいて作業速度で自走させる。
(もっと読む)
搬送台車システム
【目的】 長細い荷物や平面積が広い荷物などの特殊な荷物についても、狭い通路などの特殊な環境でも、低コストで対応することができる、搬送台車システムを提供する。
【構成】 それぞれが複数のオムニホイール付きの、複数の台車を備えており、各台車は自らの情報を取得すると共に、他の台車の情報を無線で定期的に取得することにより、マスターとの同期が必要ではない事項については、各台車(マスター及びスレーブ)が自らを自律的に制御し、発進又は停止などのマスターとスレーブとの同期が必要な事項については、マスターがその発進又は停止を指示するためのスレーブ指示信号をI/Oテレコントロール通信を使用して各スレーブに送信し、各スレーブはこれに基づいてマスターに同期して発進又は停止するようにした、搬送台車システムである。
(もっと読む)
車両制御装置、車両、及び車両制御プログラム
【課題】追従車の安全を確保しながらスムーズに追従させる。
【解決手段】追従車1は、先行車2の走行軌跡上の地点と当該地点における先行車2の車速を逐次対応づけて記憶する。追従車1は、記憶した地点のうち、自車よりも最小制御縦距離より前方にある地点を制御直近点として選択し、自車が制御直近点に向かうように旋回指令を出力する。車速が大きいほど最小制御縦距離が大きくなる。追従車1は、自車から制御直近点への方位角θrlが閾値α未満である場合には、目標点Pbcから自車までの目標点距離Ddが0となるように車速指令を出力し、α以上である場合には、制御直近点での先行車2の車速を車速指令として出力する。または、先行車2の地点、ヨーレート、及び車速を逐次対応づけて記憶し、追従車1の横加速度が先行車2の横加速度と等しくなるような車速指令も可能である。
(もっと読む)
走行車システム
【構成】 走行経路に走行車の減速度が異なる複数の区間を設ける。走行車は、走行車の走行速度と、複数の区間の減速度中で最大の減速度と、機体長パラメータとを用いて、干渉回避距離を演算する。また区間の減速度が最大の減速度よりも小さい区間で、機体長パラメータを、最大の減速度の区間よりも長くする。
【効果】 簡単な制御で、走行車の減速と再加速の繰り返しを回避でき、さらに走行車間の干渉も回避できる。
(もっと読む)
自律移動装置およびその制御方法
【課題】 障害物の存在にかかわらず目標物の位置を的確に捕らえながら、その目標物に対する常に確実かつ安定した追従移動を可能とする信頼性にすぐれた自律移動装置およびその制御方法を提供する。
【解決手段】 子ロボット21は、親ロボット1を捕捉し、捕捉した親ロボット1に対する相対位置を算出し、算出した相対位置に応じて親ロボット1に対する追従移動を制御する。このとき、子ロボット21は、自己位置を推定して親ロボット1の位置との誤差を求めており、親ロボット1の捕捉が不可能な場合に、推定した自己位置を上記求めておいた誤差に応じて補正し、補正した自己位置から親ロボット1に対する相対位置を算出、算出した相対位置に応じて親ロボット1に対する追従移動の制御を継続する。
(もっと読む)
自走制御システムおよび自走制御方法
【課題】ユーザの相対位置の推定を行うことなく、ユーザに対する追従性能の向上が可能な自走システムを提供すること。
【解決手段】電波発信源を有するユーザの方向に対して自走する車両に搭載された自走制御システムにおいて、互いに重複する部分を有する所定の通信範囲をそれぞれ形成する複数の無線通信手段を備え、前記ユーザが、いずれの無線通信手段の通信範囲内に存在するかを推定し、その推定結果に基づき、車両の移動方向を決定することを特徴とする自走制御システム。
(もっと読む)
ロボットシステム
【課題】
大量で、かつ、物流量が大幅に変動する物品を取扱う搬送システムにおいて、物流量が変動しても、フレキシブルに、常に効率良く搬送できるシステムを構築することが目的である。
【解決手段】
上記目的を達成するため、荷物を搭載する台車と、台車が搬送待機状態であることを認識する第1のロボットと、搬送待機状態の台車を設定された場所まで搬送する第2のロボットを備え、第1のロボットと第2のロボットが連動して走行することにより、解決できる。作業者により出荷先別に物品を搭載した台車が搬送待機場所に配置されると、第1のロボットは距離センサの情報からその台車が搬送待機状態であることを認識する。第1のロボットに連動することで、第2のロボットはその台車を指定された出荷先まで搬送する。第1のロボットが主に周囲環境の状況把握を行うことを役割とし、第2のロボットが台車を連結して搬送することを役割とすることにより、安全性を確保しながら、フレキシブルで、かつ、高効率の輸送を実現できる。
(もっと読む)
搬送システム及び搬送車
【課題】例えば半導体装置製造用の各種基板等が収容された容器等の被搬送物を、合流箇所を含む軌道上で搬送する搬送システムにおいて、搬送車同士の衝突を防止しつつ、搬送車を効率良く稼働する。
【解決手段】搬送システム(100)は、軌道(1)と、複数の搬送車(3)と、軌道上における合流箇所を含む所定範囲内へ、複数の搬送車のうち一の搬送車が軌道の一部を介して進入した場合に、所定範囲内へ、複数の搬送車のうち他の搬送車が軌道の他部を介して進入することを禁止する旨の進入禁止信号を出力する進入制御手段(7,9)とを備える。進入制御手段は、進入禁止信号が出力されている際に前記一の搬送車で停止を伴う故障が発生した場合に、一の搬送車の停止位置を基準として他の搬送車が一の搬送車に衝突するか否かを判定し、他の搬送車が衝突しないと判定されると、進入禁止信号を解除する。
(もっと読む)
自律移動ロボット装置及び自律移動ロボット装置の制御方法
【課題】自律移動ロボット装置において、追随目標との間に他の歩行者などの障害物が介入して追随目標までの視野が失われそうになったり、走行経路の生成が不能となった場合においても、追随目標の追随を続行することができるようにする。
【解決手段】走行部1と、周囲の障害物201の有無を計測するとともに追随目標101の位置を計測するセンサ3と、センサ3による計測結果に基づいて障害物201のない移動可能領域を検出し追随目標101を追随する移動予定路を決定しこの移動予定路上を移動させる制御手段2とを備え、制御手段2は、追随目標101までの視界が障害物201により遮られる虞があるとき、または、遮られたときには、追随目標101までの視界を確保する動作を行うことにより、追随目標101を追随する移動予定路の決定を可能とする。
(もっと読む)
複数ロボットによる探索監視方法
【課題】イベント情報を活用して、脅威対象物をより効果的に探索することができる複数ロボットによる探索監視方法を得る。
【解決手段】複数のロボットにより脅威対象物を探索監視する複数ロボットによる探索監視方法において、脅威対象物によるイベント発生時に、前記脅威対象物の移動速度を仮定することにより時間とともに拡散する脅威対象物の存在可能性の範囲を算出するステップ(S3)と、脅威対象物の存在可能性の範囲を縮小すべくロボットが移動する目的地を設定するステップ(S4)とを備える。
(もっと読む)
分散型マルチロボット・システム
従来、民生用サービス・ロボットのアーキテクチャは、サービス・タスクを実行するのに必要なすべての認識システムおよび計算システムを含む装置で構成されている。この結果、サービス・ロボットは、コスト面で厳しいものとなりまた機能も制限される。
少なくとも1つのマネージャと、無線で通信するように構成された1台または複数台のロボットとを含むシステムが提供される。マネージャは、1台または複数台のロボットによって使用されるデータ、指示またはこの両方を生成する特定の機能を含むことができる。マネージャは、いくつかのロボット間の通信に役立つこともでき、ロボットは、直接通信するように構成されてもよい。  (もっと読む)
(もっと読む)
サービスロボットによって収集された時空間情報のリパーパシングを行うための方法
本明細書において実装されるロボットおよび方法は、時空間情報の能動的リパーパシングを実行する。ロボットは、情報を分析して、最初に情報が発生した一次サービス機能の有効性および効率を改善するように構成されうる。ロボットは、この情報を使用して施設の3次元(3D)モデルを作成するように構成され、環境のバーチャルツアーの作成、ビデオゲームへの環境のポーティングなどの多数の機能に使用することができる。ロボットは、この情報を利用して、次のカタログを使用して選択された物体を後で特定できるように施設内の物体を認識し、分類するか、または施設効果の保険証書に必要とされるようなすべての項目の大域的カタログを作成するように構成されうる。  (もっと読む)
(もっと読む)
自律移動装置
【課題】特定の人が他の人とグループを構成する状況を考慮した自律移動装置を提供する。
【解決手段】自律移動装置1は、特定の人の近くにいる他の人が特定の人と共に移動するグループに属しているか否かを判定するグループ判定手段23と、自律移動装置が特定の人を追従するエリアである自装置追従エリアの情報を取得する自装置追従エリア取得手段21aと、他の人に追従する他の自律移動装置が他の人を追従するエリアである他装置追従エリアの情報を取得する他装置追従エリア取得手段22aと、グループ判定手段により他の人がグループに属していると判定され、且つ、自装置追従エリアの一部が他装置追従エリアと重複する場合に、他装置追従エリアと重複しない位置において自律移動装置を特定の人に追従させる追従制御手段24,26と、を備える。
(もっと読む)
先導者追従車両
【課題】頻繁に加減速や走行停止を繰り返すことのない安定した追従を行いながら先導者が先導者追従車両に自由にアクセスでき、先導者追従車両の動きを操作できる先導者追従車両を実現する。
【解決手段】先導者追従車両1が追従制御を行う追従目標位置は原点が先導者の現在位置、XL軸が先導者の進行方向として定義された先導者中心座標系103において、距離101、角度102で追従制御指示装置を用いて先導者から指定される。角度102、距離101は先導者が突然立ち止まった場合にも先導者に追突することなく安全に停止できる距離や周囲環境のセンシング範囲に制限される。追従目標位置の指定には先導者追従車両1が先導者に対して前進して追従するか後進して追従するかも指定する。前進か後進かを指定できることで先導者によって先導者追従車両が可能な動きの全てを操作することが可能となる。
(もっと読む)
走行車システム
【課題】走行車同士の衝突を確実に防止すると共に、走行車システムの小型化および製造コスト削減に寄与する技術を提供する。
【解決手段】走行車4・4・・・は、当該走行車4の現在位置を把握する走行位置把握手段23と、上位コントローラ5と通信するコントローラ間通信手段21と、当該走行車4の前後を走行する他の走行車4と直接通信する走行車間通信手段22と、走行車間通信手段22による通信の有無を把握する通信有無把握手段24と、を備え、当該走行車4の前方走行車の位置を前記両通信手段21・22により受け取ると共に、走行車間通信手段22による通信があるときには、該走行車間通信手段22による通信により受け取った走行車位置情報を衝突防止制御に用い、走行車間通信手段22による通信がないときには、コントローラ間通信手段21による通信により受け取った走行車位置情報を衝突防止制御に用いる構成とする。
(もっと読む)
移動ロボット
【課題】無線基地局と通信する無線環境の状態を適確に判断できるマップを作成する移動ロボットを提供する。
【解決手段】移動ロボットRは、無線親機1と無線通信を行う無線通信部160と、無線通信部160が受信する無線強度を含む無線環境の良好度を示す複数種類の無線環境データを検出する無線環境検出部163と、複数種類の無線環境データに所定の重み付けをして総合無線環境データを算出する総合無線環境データ算出部141と、自己位置認識手段たるジャイロセンサSR1及びGPS受信器SR2と、移動ロボットRが移動する移動領域の地図データを記憶する記憶部190と、総合無線環境データを、記憶部190に記憶された地図データに、無線環境データを検出したときに自己位置認識手段によって認識した自己位置に対応付けて書き込むことで、総合無線環境マップを作成する総合無線環境マップ作成部142と、を備えて構成される。
(もっと読む)
1 - 20 / 27
[ Back to top ]