
Fターム[5H301DD05]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 移動体への指令の設定方法、設定手段 (1,386) | 移動中に外部から与えられるもの (484)
Fターム[5H301DD05]の下位に属するFターム
手動操縦によるもの(リモコン) (159)
固定設置された装置から与えられるもの (195)
他の移動体から与えられるもの (27)
Fターム[5H301DD05]に分類される特許
41 - 60 / 103
買物経路誘導システム
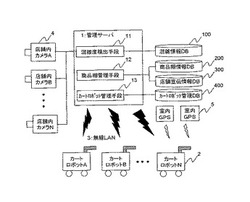
【課題】 ショッピングセンタなどにおいて、ユーザを必要な場所まで誘導するカートロボットを用いたシステムを提供する。
【解決手段】
ユーザの買物経路を誘導するシステムであって、管理サーバは、商品棚位置情報、店舗内のカメラからの混雑情報、およびカートロボットの経路情報を格納し、各情報をカートロボットに送信し、カートロボットは、商品棚位置情報をもとに目的とする棚位置までの距離を最短とする経路計画を生成し、当該経路にしたがってカートを移動させ、曲がり角を検出したときに、ステアリング操作が自動的に行われることを特徴とする。
(もっと読む)
遠隔監視システム

【課題】 監視員の確認負担を軽減した移動ロボットの遠隔監視システムの提供。
【解決手段】 移動ロボットは、監視区域を移動して検知部が異常を検知すると監視センタに異常信号を送信し、異常が検知される該異常を保持する記憶部と、監視センタから自動復旧信号を受信したときに、検知部が前記異常を検知しなくなると前記異常の保持を解除する復旧処理を実行する復旧処理部と、異常の検知により移動を停止させ、該異常の保持が解除されると移動を再開させる移動制御部とを備え、監視センタは、異常信号を受信したときに動作する報知部と、複数の動作モードを管理するモード設定部と、異常信号を受信したとき、自動復旧モードであれば前記報知部の動作を禁止して移動ロボットに自動復旧信号を送信し、自動復旧信号を送信しても移動ロボットが異常の保持を解除しない場合に報知部を動作させる自動復旧制御部とを備える。
(もっと読む)
天井走行車
【構成】 カセット20をラテラルドライブ8で左右動させながら、カセット20の背面下部に設けたID23を、天井走行車4の走行中にIDリーダ26で読み取る。
【効果】 余分の時間を必要とせずに、IDを確実に読み取れる。
(もっと読む)
掃除機システムとそのプログラム
【課題】ほこりのある部分のみを掃除するようにし、掃除時間の短縮化と、無駄な消費電力を抑え、効率的な掃除が行える掃除機システムを提供することを目的とする。
【解決手段】掃除機200は掃除機側通信手段201を有し、掃除機とは別個に動作する移動体手段100は、ほこり、障害物、移動量を検出するセンサ手段103、掃除機と双方向で通信をする移動体側通信手段104、走行するための駆動手段102、これら各手段を制御する制御手段104、および電源105を有し、センサ手段103の検出結果に基づき移動体側通信手段104と掃除機側通信手段201間の通信信号により掃除機200を誘導するようにしたものである。これによって、移動体手段100が予め掃除をする場所を特定し、掃除機200を誘導するので、ほこりのある部分のみを掃除することになり、掃除時間の短縮化と、無駄な消費電力を抑え、効率的な掃除が行える。
(もっと読む)
障害物を迂回可能な自律移動ロボット及びその方法
障害物を迂回することが可能な自律移動ロボット及びその方法が提供される。前記自律移動ロボットは、移動体と、前記移動体に連結され前記移動体の引っ張る力に比例して伸びる伸長ユニットと、前記伸長ユニットに連結された前記物体の前記引っ張る力に対応して前記移動体に向かって前記自律移動ロボットを移動させる駆動ユニットと、前記移動体の前記引っ張る力に対応して前記伸長ユニットが伸びる伸長長さによるルート情報を獲得するルート情報獲得ユニットと、前記移動体に先導されている前記自律移動ロボットの進行方向の所定距離内に位置する障害物の存在を検出する障害物検出ユニットと、前記ルート情報に基づいたルートに沿って前記自律移動ロボットが移動するように前記駆動ユニットを制御する制御ユニットとを含む。これにより、障害物と自律移動ロボットとの衝突を防ぐことができ、自律移動ロボットは自然に障害物を迂回することができる。  (もっと読む)
(もっと読む)
搬送台車システム
【構成】 ロードポート間通信により、各ロードポートは、他のロードポートでの搬送要求タイマの設定値Tと目標搬送量からの変位ΔHとを学習する。そして(T,ΔH)の平面を適宜の評価関数で評価し、自己よりも効率の高いロードポートを発見すると、自己の搬送要求タイマの値を高効率のロードポートでの値に近づける。
【効果】 自律的に搬送要求タイマを更新でき、しかもシステムの効率を極大化できる。
(もっと読む)
移動体システム
【構成】 移動体2の走行方向に平行に2列に磁気マーク21,22を配置し、2個のリニアセンサ16,17で各磁気マーク21,22を基準とする絶対位置を求める。各磁気マーク21,22の中心の原点基準の絶対位置を記憶し、検出する磁気マークを切り替えながら、移動体2の絶対位置を求める。
【効果】 離散的に配置した磁気マークで、移動体の絶対位置を連続的に検出できる。
(もっと読む)
移動体設備
【課題】移動体同士の衝突を簡素な構成により回避することができる移動体設備を提供すること。
【解決手段】複数の移動体3a,3bの夫々に、走行駆動手段SM1,AMP1,SM2,AMP2の駆動量を検出する駆動量検出手段RE1,RE2が設けられ、移動体同士の車間を監視する車間監視用制御手段Wが、移動体の夫々について、駆動量検出手段にて検出される駆動量情報C1,C2に基づいて得られる予測走行移動量と、走行位置検出手段DET1,DET2にて検出される走行位置情報D1,D2に基づいて得られる実走行移動量との対応関係により走行位置情報が適正であるか否かを判別し、適正であると判別された複数の移動体についての適正走行位置情報に基づいて、移動体同士の間隔が予め設定された許容間隔以上離れているか否かを判別し、移動体同士の間隔が許容間隔以上離れていないと判別した場合には、全ての移動体の走行を停止させるように構成されている移動体設備を構成した。
(もっと読む)
無人搬送車の制御方法
【課題】無人搬送車において、外部との協調動作を行う際の制御方法を提供するものである。
【解決手段】目標速度が設定されてない被牽引区間では走行速度制御60を停止し且つ操舵制御40のみを有効とした被牽引モードに切り替える運転モード切替装置70を搭載したので、被牽引区間では、無人搬送車を外部との協調動作により移動させる際、駆動輪を駆動回転させることなく、マーキング線検出センサ10で検出されるマーキング線aに沿って走行するべく操舵輪を操舵することができる。
(もっと読む)
無人搬送車の制御方法
【課題】無人搬送車において、無人搬送車を手押し操作によって移動する際に適する制御方法を提供するものである。
【解決手段】無人搬送車本体1の方向と駆動輪2の向く方向のなす角度を検出する角度センサ30を設け、角度センサ30で検出される角度が常に零となるように駆動輪2を操舵する手操作モードを設定したので、手操作モードにおいては、手操作により無人搬送車の向きを変えながら無人搬送車本体1を手押し操作する際、無人搬送車1の向きと駆動輪2の向きが常に一致することとなり、駆動輪2の向きが常に無人搬送車1を移動させたい方向に向くことになる。
(もっと読む)
自律移動ロボット、自律移動方法および自律移動情報処理プログラム
【課題】従来の自律移動ロボットでは、自律移動中の障害物の回避が不能等の突発的事態に対処するための人的介入や、自律移動中に一時的な経路変更をするなどの人的介入を行う場合に、当初の自律移動を強制終了して新たな移動条件を与えて新たな自律移動を開始することが必要で、自律移動中の人的介入を柔軟に行うことができない、という課題があった。
【解決手段】自律移動ロボットを駆動する走行制御系と、該自律移動ロボットの周囲の存在物の相対位置を観測する観測手段と、外部からの人的介入情報を入力する人的介入情報入力手段と、前記観測された存在物位置情報を所与として、かつ前記人的介入情報を所与とするアルゴリズムで移動経路を作成する半自律移動経路計画エンジンと、前記移動経路に基づいて該自律移動ロボットを移動させる走行コマンドを生成する走行コマンド生成部と、を有する自律移動ロボットによって上記課題が解決される。
(もっと読む)
自走式装置及び自走式掃除機
【課題】1台で、ペット等の対象物の状態をユーザに確実に知らせることができる自走式装置及び自走式掃除機を提供する。
【解決手段】自走式掃除機1のおいて、所定の対象物に取り付けたICタグから識別情報等を読み取るICタグ読取部131と、ICタグ読取部131により読み取られた識別情報等を含む監視情報を、ユーザ所有の携帯電話機に送信する通信部134と、を備えるよう構成した。
(もっと読む)
複数の自律ロボットからなる群の動作を制御するシステムと監督ロボット、探索ロボットおよび表示装置
【課題】多数の群ロボットで探索エリアを探索するには、それぞれのロボットの制御が困難になる。
【解決手段】環境中に多数の探索ロボットを配置し、それらのロボットのそれぞれが情報を交換しながら自律的に自らの動作を適切に制御し、これによって環境中に存在する周囲とは異なる性質を持った事物を見つけ出すことがきるようにする。各探索ロボットはカメラ(18)で周囲の画像を取り画像の特徴を抽出する。監督ロボットはその特徴を集めて顕著性を検出し各探索ロボットに通知する。探索ロボットは回転アンテナ(20)によって顕著な画像を見た探索ロボットの位置を知り、移動手段(14)で移動する。
(もっと読む)
コークス炉における移動機の自動運転方法
【課題】衝突防止策を講じた上で複数の移動機を併用し、コークス炉の効率的な運用を図る。
【解決手段】移動機のレール8に平行に敷設した誘導無線線路9および移動機に搭載した車上局31からの位置情報を取得して走行エリアを監視し、衝突を防止しつつ、CDQ設備における冷却塔の装入レベル情報に基づき、バケット車の運転を優先させる。
(もっと読む)
工場内線路合流点近傍での台車接触事故防止装置
【課題】製鉄所などの工場内線路の本線から側線への合流点近傍における台車の接触事故を、確実かつ低コストで防止できる装置を提供する。
【解決手段】本線Aから線路を分岐させて側線Bへ合流させるための転てつ器1と、分岐点Dより後方の本線A近傍に設けられ、本線B上を走行中の台車F上から手動操作することにより転てつ器1を転換させる転てつ梃子2と、合流点Dより後方の側線B上または側線B近傍に設けられ、合流点Dに向かう台車Gの通過により、転てつ器1を線路分岐なしの状態に転換するとともに、その状態で鎖錠する転てつ器鎖錠スイッチ3と、合流点Dより前方の側線B上の台車同時立入禁止区域Hに台車Gが在線しているとき、転てつ器1を線路分岐なしの状態で鎖錠する転てつ器鎖錠回路4と、分岐点D近傍であるが台車F上からは手動操作できない位置に設けられ、前記鎖錠を解除する手動の転てつ器鎖錠解除ボタン5と、を備えた工場内線路合流点近傍での台車接触事故防止装置。
(もっと読む)
ロボット位置制御装置およびロボット自己位置回復方法
【課題】ロボットがエラー状態になり,自己位置および向きを喪失した場合でも,それらを精度よく認識し,回復することが可能となる技術を提供する。
【解決手段】ロボット1において,RFIDタグ検出部101がRFIDリーダ20によってRFIDタグを検出すると,位置特定部102は,検出されたRFIDタグの位置からロボット1の位置範囲を特定する。ランドマーク検出部104がステレオカメラ30によって撮像された画像からランドマークを検出すると,位置・方位特定部106は,検出されたランドマークの位置,方位などから,ロボット1の自己位置を特定する。特定されたロボットの自己位置が特定された位置範囲内であることが位置照合部108によって確認できれば,位置回復部111は,ロボット1を初期位置または作業継続位置に回復させる。
(もっと読む)
速度制御方法及び速度制御装置
【課題】物体の通過する軌跡上の各点における曲率に応じた速度で物体を移動させる速度制御方法の提供。
【解決手段】軌跡の座標データを入力、軌跡上の各点における曲率を計算、算出された各点での曲率から各点での物体の速度を(1)式に示される角速度を用いた(2)式にて計算、算出された各点での速度を物体に出力。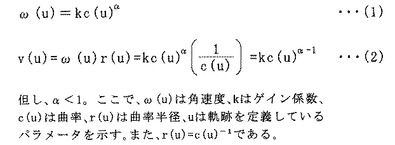 (もっと読む)
(もっと読む)
無人搬送設備
【課題】本発明は、無人搬送車が自動で初期位置情報を正確に設定できる無人搬送設備を提供することを目的とする。
【解決手段】初期位置を最終決定する基準点17より上流の基準点17に、無人搬送車1を、前後の磁気センサ11a,11bがともに磁気マーカ18を検出できるように配置し、上流の基準点17における仮の初期位置情報を求める。このとき、磁気センサ11は磁気マーカ18のどの位置でも検出可能であればよい。この仮の初期位置情報を現在位置とし初期位置を最終決定する基準点17の絶対座標を目標位置として、無人搬送車1を自律走行させ、基準点17に接近し、前方の磁気センサ11aにより前方の磁気マーカ18を検出すると、走行を停止する。停止すると、両磁気センサ11a,11bにより検出されている前ズレ量と後ズレ量により、初期位置を最終決定する基準点17の初期位置情報を求める。
(もっと読む)
誘導装置
【課題】生物の認知地図のメカニズムを模倣して、移動体を誘導する誘導装置を提供する。
【解決手段】進行方向及び速度を含む移動指示に基づいて移動する移動体を誘導する誘導装置であって、移動体の周囲の地形特徴を検知する画像認識部101と、移動目標となる地形特徴の選択を受け付ける移動目標セレクタ15と、移動目標が選択されていない時に進行方向及び速度を時間経過に応じて変化させて移動指示を出力する固有移動指示部103と、移動目標が選択されていない時に移動指示の時間変化の履歴と移動中に検知された画像認識部101の検知結果とを関連付けて認知記憶情報として記録する空間−時間情報生成部111と、移動目標が選択されている時に認知記憶情報に基づいて、移動体を移動目標へ誘導する移動指示を出力する誘導移動指示部113とを備える。
(もっと読む)
搬送システム
【構成】 搬送指令の作成時に塞がっているロードポートへ物品を搬送する際に、物品のロードポートへの到着予測時刻T1と、ロードポートを塞いでいる物品の取り去り予測時刻T2とを比較し、時刻T2がT1より早い場合、ロードポートを搬送先とする搬送指令を割付け、時刻T2がT1より遅い場合、ロードポートよりも上流側のバッファを搬送先とする搬送指令を割付る。
【効果】 ロードポートからロードポートへの直接搬送を増すとともに、バッファからロードポートへ転送する場合でも、搬送車が周回走行せずに速やかに転送できる。
(もっと読む)
41 - 60 / 103
[ Back to top ]