
Fターム[5H301FF11]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 移動体の位置認識用固定設備 (875) | 絶対位置認識のためのもの (186)
Fターム[5H301FF11]に分類される特許
1 - 20 / 186
重症心身障害者の自立的移動支援装置
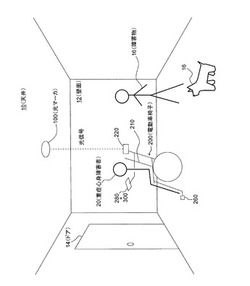
【課題】床にテープやガイドライン等を配置する必要が無く、レイアウト変更に対応可能な、重症心身障害者の自立的移動支援装置を提供する。
【解決手段】重症心身障害者の自立的移動支援装置において、移動空間の天井10や壁面12に配設された、該移動空間や移動装置200の進行方向に関する情報を発信するためのマーカ100と、移動装置200に配設された、前記マーカ100からの信号を受信するための受信手段220、周囲の壁面12や障害物16までの距離と方位を検出するための測位手段240、移動先を重症心身障害者20が指定可能な入力手段280、前記測位手段240の測定結果や前記マーカ100からの信号に基づき移動方向を判断して、前記入力手段280で指定された移動先まで移動装置200を移動するよう制御するための制御手段320、及び、該制御手段320の出力により移動装置200を駆動する駆動手段340と、を備える。
(もっと読む)
情報取得装置、情報取得方法、情報取得プログラム、及び、情報取得システム

【課題】移動可能なノードが複数存在する空間において、位置認識の確実性を向上させる。
【解決手段】作業空間内の各ロボット100は、3つの他のロボット100からの光を受けて、当該他のロボット100の絶対位置の情報を取得することにより、自己の絶対位置を判別する。また、作業空間内の各ロボット100は、2つの他のロボット100からの光を受けて、当該他のロボット100の絶対位置の情報と、当該他のロボット100の位置から自ノードであるロボット100への絶対方位の情報とを取得することにより、自己の絶対位置を判別する。
(もっと読む)
物品処理設備
【課題】物品の搬送を停滞なく適切に行えるようにしながらも、装備する無人搬送車の台数を減少させて設備の設置コストの低下を図ることができる物品処理設備を提供する。
【解決手段】外部搬出入部Bに位置する物品Pを自動倉庫Aの物品入出庫部2に搬送する物品搬入処理、及び、自動倉庫Aの物品入出庫部2に位置する物品Pを外部搬出入部Bに搬送する物品搬出処理を行うべく、無人搬送車担当経路における自動倉庫側に位置する倉庫側物品移載部F及び外部搬出入部側に位置する外部側物品移載部Gとの間での搬送作業を無人搬送車10に割り付ける搬送管理手段が、割込み要求が指令されたときには、倉庫側物品移載部Fと外部側物品移載部Gとの間での搬送作業の一部の搬送作業を、作業者によって運転される有人搬送車Mに割り付けるように構成されている。
(もっと読む)
移動体システムと移動体の走行制御方法
【課題】
カーブ区間で移動体の位置を正確に求め、移動体を高い精度で移動させる。
【構成】
移動体の走行への制御中心から、移動体の走行方向とは異なる方向にシフトした位置で、走行方向に沿った移動体の位置を検出する検出器を設ける。移動体の走行経路中の少なくともカーブ区間に対して、検出器の出力に対する制御中心の走行方向に沿った位置を記憶部に記憶し、記憶部から読み出した制御中心の位置に基づき、移動体の走行を制御部により制御する。
(もっと読む)
自己位置推定装置、自己位置推定方法およびプログラム
【課題】自己位置を正確に推定することが可能な自己位置推定装置、自己位置推定方法およびプログラムを提供する。
【解決手段】自己位置推定装置は、撮影部、距離算出部、ランドマーク位置取得部、自己位置推定部、移動位置予測部、観測尤度計算部、視野内ランドマーク抽出部、撮影角度変更部、撮影制御部を有している。ランドマーク位置取得部は、各ランドマークの位置を取得する。自己位置推定部は、取得された画像、算出された距離、および上記位置に基づき自己位置を推定する。移動位置予測部は、推定された自己位置に基づき予測位置を算出する。撮影角度変更部は、視野内ランドマーク抽出部が抽出した視野内ランドマークについて観測尤度計算部が計算した観測尤度と、視野内ランドマークの観測角度とに応じて撮影角度を変更する。撮影制御部は、変更後の撮影角度で撮影した画像に基づき自己位置を更新する。
(もっと読む)
有軌道台車システム
【課題】有軌道台車システムにおいて、台車の不要な速度低下や走行停止を抑制する。
【解決手段】有軌道台車システムは、分岐点及び合流点を含む所定領域内に誘導線(600)を有する軌道(100)と、軌道を走行する複数の台車(200)と、誘導線管理装置(700)とを備える。複数の台車の各々は、送信部及び受信部(910,920)と、走行制御部(205)とを備える。誘導線管理装置(700)は、誘導線受信部及び誘導線誘導線送信部(710,720)と、特定台車(250)の第1の無線信号受信部(930)に対して無線信号を送信可能な第1の無線信号送信部(740)とを備えており、一の誘導線領域に一の特定台車を優先させて進入させる場合に、一の誘導線にブロッキング信号を送信すると共に、一の特定台車に対して一の誘導線領域内への進入を許可する許可信号を送信する。
(もっと読む)
搬送車システム、速度決定方法
【課題】環状の軌道上を一方通行で走行する搬送車を備える搬送車システムにおいて実荷状態で走行する搬送車の状況を把握し、搬送車システムの搬送効率を向上させる。
【解決手段】環状の軌道101と、搬送車102と、ステーション103とを備え、さらに、荷物を搬送する計画を示す情報である搬送計画を取得する搬送計画取得部104と、ステーション103、および、セグメントのレイアウト情報であるマップを取得するマップ取得部105と、搬送計画とマップとからセグメント毎に荷物を積載した状態で搬送車が通過する回数である実荷通過度数を算出する度数算出部106と、周回方向において実荷通過度数が連続的に増加するセグメントの区間である増加区間を特定する増加区間特定部107と、増加区間の実荷通過度数の低いセグメントにおける搬送車102の速度を低下させる制御部108とを備える。
(もっと読む)
移動駆動ユニットの動きを調整するシステムおよび方法
【課題】一つまたは複数の移動駆動ユニットを作業スペース内で動かす方法を提供する。
【解決手段】一つまたは複数の移動駆動ユニットを作業スペース内で動かす方法が、第一の移動駆動ユニットから、第一の方向に動くために第一の経路セグメントの使用を要求する予約要求を受信する段階を含む。本方法はさらに、前記第一の経路セグメント上に第二の移動駆動ユニットが現在位置されていることを判定する段階と、前記第二の移動駆動ユニットが前記第一の方向に動いているかどうかを判定する段階とを含む。さらに、本方法は、前記第二の移動駆動ユニットが前記第一の方向に動いているのではないと判定するのに応答して、前記予約要求が拒否されることを示す予約応答を送信する段階を含む。本方法はまた、前記第二の移動駆動ユニットが前記第一の方向に動いていると判定するのに応答して、前記予約要求が承認されることを示す予約応答を送信する段階を含む。
(もっと読む)
歩行ロボット装置及びその制御プログラム
【課題】環境地図の作成と自己位置推定を、求められる精度を確保しつつ、安価に実現することのできる歩行ロボット装置及びその制御プログラムを提供する。
【解決手段】環境地図を作成する機能は、2ヶ所において撮影した地図作成用環境画像から撮影対象物を示す代表点を抽出し、代表点の位置と撮影した位置座標とから撮影対象物の位置座標を求め、撮影した地図作成用環境画像、代表点の位置及び前記撮影対象物の位置座標とを関連付けた環境地図を作成する。自己位置を推定する機能は、任意の位置座標において撮影した位置推定用環境画像中の撮影対象物の代表点に、対応する地図作成用環境画像中の撮影対象物の位置座標を対応させ、交会法によって前記歩行ロボット装置の自己位置を算出する。
(もっと読む)
搬送用走行体の走行制御方法
【課題】走行速度可変の自走式搬送用走行体1を作業区間WAに一定の作業速度VLまで減速させた状態で進入させること。
【解決手段】各搬送用走行体1には、前後に隣り合う搬送用走行体1間でデータ通信を行うデータ通信手段13,14が設けられ、作業区間WAの上手側走行経路中には、計測起点P1が設定され、作業区間WAへ高速で接近する後ろ側搬送用走行体1Zとその前方の作業速度VLで走行する前側搬送用走行体1Yには、計測起点P1からの走行距離に相当する現在位置情報を持たせ、後ろ側搬送用走行体1Zでは、自体の現在位置情報と前記データ通信手段を介して受け取った前側搬送用走行体1Yの現在位置情報とに基づいて前側搬送用走行体1Yとの間の距離を演算させると共に当該距離の漸減変化に基づいて減速制御を行わせ、前記距離が設定値に達したドッキング完了時に後ろ側搬送用走行体1Zが作業速度VLで自走しているように制御する。
(もっと読む)
移動車両の制御システム
【課題】移動車両を下り段差へ近づけすぎることなく、危険領域で安全に進行方向を切り替えることのできる移動車両の制御システムを提供することを目的とする。
【解決手段】上記課題を解決するための本発明の移動車両の制御システムは、外部環境情報を検出する外部環境センサと受光した光より識別番号を検出する識別番号検出部とを有する移動車両と、前記識別番号を含む光を下り段差に照光する照光部と、前記外部環境情報を用いて前記移動車両の周囲の下り段差が位置する方向を算出する方向算出部と、前記移動車両の移動を制御すると共に、前記識別番号検出部で検出された識別番号が所定の番号である場合に前記方向算出部で算出された下り段差の存在する方向を進行禁止範囲として設定する制御部と、を備えたことを特徴とする。
(もっと読む)
無人搬送車の走行制御装置、および無人搬送車
【課題】走行ガイド、ステーション等の位置ずれを修正しなくても、安定して走行・荷役を行うことができる無人搬送車の走行制御装置、および無人搬送車を提供する。
【解決手段】本発明に係る走行制御装置2は、複数の区間に区分けされた走行経路に沿って敷設された走行ガイドの位置を検知しながら走行する無人搬送車の走行制御装置であって、走行ガイドとの相対位置に応じたセンサ出力信号を出力するガイドセンサ3a、3bと、現在走行中の区間である現区間を特定する区間特定手段4a、4b、10と、区間毎の目標センサ出力値が予め格納された記憶部11と、記憶部11を参照して現区間に応じた目標センサ出力値を取得し、ガイドセンサ3a、3bから出力されるセンサ出力信号の値と目標センサ出力値との差が極小となるように操舵方向を変化させる操舵制御部12とを備えている。
(もっと読む)
自動芝刈り機
【課題】走行路面に柔軟に対応して傾斜地形のカッティングも可能な自動芝刈り機を提供する。
【解決手段】本発明は、少なくとも位置検出手段を含む各種センサとモータ制御の駆動輪とを有し、学習機能を担う制御ユニットを備えた自律走行型の自動芝刈り機であって、制御ユニットは、センサの情報を基に駆動輪を制御して目標地点に移動させるためのドラム制御部と、走行路面の傾斜に応じて車軸を動かし車体の平衡を保つ車体平衡部と、走行路面に沿ってカッティングユニットを追従させて芝刈りを行うカッティング部と、センサの情報を基に各ユニットを制御するための各種演算及び該演算に対応する処理を行う演算処理部と、を有する。
(もっと読む)
自律走行搬送システム
【課題】どのような経路であってもその経路に沿って搬送することができ、且つ経路から外れた場合に迅速、且つ的確にもとの経路に戻ることができる自律走行搬送システムを提供する。
【解決手段】搬送経路に配置された複数のICタグと、走行駆動機構と、前記ICタグの情報を読み取るタグリーダと、これらの走行駆動機構とタグリーダの動作をコントロールする制御部とを備え位置を把握しながら搬送経路に沿って走行する搬送台車とにより構成され、制御部は、搬送経路に関するマップ情報を格納するメモリと、ICタグ情報とマップ情報に基づいてドライバをコントロールするCPUとを備え、CPUは、前記マップ情報を基に搬送台車をICタグの間で自律走行させる一方、複数のタグリーダからのICタグ情報により搬送台車の搬送経路からのずれを検出してドライバに走行修正信号を送付するようにした。
(もっと読む)
自律走行作業車の制御装置
【課題】走行予定領域の境界と走行予定領域における作業車の位置を簡易な構成で検出するようにした自律走行作業車の制御装置を提供する。
【解決手段】原動機(電動モータ)と、原動機に接続される駆動輪と、作業機(ブレード)とを備え、走行予定領域を原動機を駆動して自律走行しつつ作業する自律走行可能な作業車の制御装置において、方位(地磁気)センサの出力に基づいて絶対方位を検出すると共に、磁気ネイル(磁石)に対する位置を検出し、磁気ネイルの埋設位置を座標で示す地図情報と検出された位置に基づいて走行予定領域における作業車の位置を検出し(S12,S20,S32)、検出される絶対方位と作業車の位置とYawセンサなどの出力に基づいて算出される進行方位と走行距離に基づき、予め定められた作業プログラムに従って走行予定領域Aでの作業を制御する(S10からS46)。
(もっと読む)
自動搬送システム
【課題】導線によらない自律走行区間を含む自動搬送システムにおいて、シンプルなシステム構成によりコストを抑えたシステムを提供すること。
【解決手段】自動搬送システム1は、自動搬送車2が追従可能なガイドライン11、12が経路に沿って敷設された第1及び第2の追従区間と、第1の追従区間と第2の追従区間との間に配置され、自動搬送車2が自律走行する自律走行区間と、自律走行区間の自動搬送車2を第2の追従区間のガイドライン12に復帰させるための復帰パターン100が敷設された復帰走行区間と、を含み、自動搬送車2は、復帰パターン100の外縁101が検出されたときに追従走行制御に切り換えられる。
(もっと読む)
搬送車システム
【課題】左右の車輪を独立して駆動可能な搬送車を用いた搬送車システムにおいて、曲線部走行時に搬送車がスムーズに走行可能とする。
【解決手段】搬送車システム1は、第1走行車輪25及び第2走行車輪28は、搬送車本体15の左右に設けられ、第1モータ26及び第2モータ29によって駆動される。前側ガイドローラ対81及び後側ガイドローラ対83は、第1走行車輪25の前側及び後側にそれぞれ設けられている。速度パターン発生部62は、搬送車3が曲線部203を走行するときに、前側ガイドローラ対81対及び後側ガイドローラ対83がガイドレール6に接触しない走行軌跡に基づいて作成した速度指令を第1モータ26及び第2モータ29に与える。
(もっと読む)
モバイル機器のナビゲーション
【課題】ビーコンを用いて自己位置を決定する視覚ベースの自律ナビゲーションシステムにおいて、高精度かつ安価な位置決定方法を提供する。
【解決手段】モバイル機器(ロボット)680は撮像手段で取得した画像から少なくとも1つのビーコンA、B、C、D、E、F、G、H、I、J、K、Lの画像に対する空間情報を決定し、この空間情報に基づいて、モバイル機器の位置を判断する。空間情報を決定するステップは、少なくとも1つのビーコンの各ビーコンを特定する符号化された視覚情報に基づく。画像は、モバイル機器の周囲の環境の少なくとも一部の少なくとも1つのビーコンの画像を含む。モバイル機器にあらかじめ記憶された位置情報と特定されたビーコンの画像からモバイル機器の位置決定が可能となる。
(もっと読む)
自律走行作業車の制御装置
【課題】走行予定領域において予め定められた走行パターンに従って走行すると共に、角速度センサの出力を適正に較正するようにした自律走行作業車の制御装置を提供する。
【解決手段】作業車の重心位置の鉛直軸回りに生じる角速度を示す出力を生じるYawセンサと車輪速を示す出力を生じる車輪速センサの出力に基づいて算出される進行方位と走行距離に基づき、走行予定領域において予め定められた走行パターンに従い、作業車を直進走行させつつ、作業させる走行作業制御において、直進走行のとき、予め定められた走行パターンで予定される予定走行距離L1と実走行距離L2の差が誤差許容値αを超えるか否か判定し(S10からS18)、差が誤差許容値を超えると判断されるとき、Yawセンサの出力の中心値を補正する(S22)。
(もっと読む)
無人搬送車
【課題】加熱炉外の出発点から加熱炉内の目標点まで正確に走行できると共に、加熱炉外のスペースを有効利用できるようにした無人搬送車を提供する。
【解決手段】荷役ステーションから加熱炉Yに向かって走行する無人搬送車1を、加熱炉Yの外部において第1および第2ガイドセンサ78a,78bと第1マークセンサ79aとを使用して走行させ、加熱炉Yの内部において第1〜第3レーザセンサ80a,80b,80cとを使用して走行させることで、加熱炉Yの内部に設定された停止位置(目標点)に停止させることができる。
(もっと読む)
1 - 20 / 186
[ Back to top ]