
Fターム[5H301JJ01]の内容
移動体の位置、進路、高度又は姿勢の制御 (17,810) | 移動体の速度制御、起動・停止時の制御 (362) | 加減速制御を行うもの (340)
Fターム[5H301JJ01]の下位に属するFターム
連続的な加減速パターンを有するもの (18)
不連続的な加減速パターンを有するもの (2)
Fターム[5H301JJ01]に分類される特許
1 - 20 / 320
走行体制御装置、走行体制御方法、走行体制御プログラム及び記録媒体
【課題】被搬送物の損傷を防止しつつ搬送することで、被搬送物を用いた製品の生産効率等を向上させつつ、損傷した被搬送物が出荷等されることに起因する損害の発生等を抑止することが可能な走行体制御装置を提供する。
【解決手段】ガラス板Gを搬送するスタッカクレーンSを制御する場合に、ガラス板GのスタッカクレーンSへの搭載及びガラス板Gにおける振動の発生が共に検出されたとき、スタッカクレーンSを減速又は停止させる。
(もっと読む)
倒立型移動体制御装置、及びその制御方法

【課題】倒立型移動体の安全性を向上させる。
【解決手段】倒立型移動体の状態量を検出する状態検出手段123と、操作情報に応じた操作指令値を算出する指令入力手段122と、倒立型移動体の状態量に基づいて搭乗者の姿勢状態を推定する状態推定手段131と、倒立型移動体の状態量と駆動手段に対するトルク指令値とに基づき走行状態を判定する判定手段132と、推定された搭乗者の姿勢状態と判定された走行状態とに基づき走行状態毎に状態量、姿勢状態及びトルク指令値を調整する際の優先順位を設定し、優先順位に応じて制御パラメータの重みを算出する重み演算手段133と、判定された走行状態と算出された操作指令値とに基づいて判定された走行状態毎に検出される状態量の目標値となる指令値を算出する指令演算手段134と、算出された操作指令値と指令値と制御パラメータの重みとに基づいてトルク指令値を算出するトルク指令演算手段135とを備える。
(もっと読む)
制御方法、プログラム、記録媒体、及び、制御装置
【課題】複数の固有振動数が生じる場合において、運ばれる物体に移動装置の振動に伴う揺れを全く生じさせないことによって安定して確実且つ迅速に物体を運ぶことができる制御方法等を提供する。
【解決手段】物体を運ぶ移動装置の速度関数を三角関数の級数で表し(S1)、三角関数の級数においてサイドローブが発生しない係数a1等を求め(S2)、物体の重量と移動装置における重心位置とから生じる複数の固有振動数を求めて最低固有振動数fminを求め(S3)、最低固有振動数fminがメインローブとサイドローブとの境界周波数fc1よりも大きな値の帯域となるように加減速時間tcを設定し(S4)、係数a1等と加減速時間tcが決まって得られた速度関数により物体を運ぶ移動装置の速度を制御して物体を運ぶ(S5)。
(もっと読む)
無人搬送システム
【課題】マーカーを設けることなく無人搬送車の走行速度を制御することができる無人搬送システムを提供する。
【解決手段】誘導ライン2Dと、無人搬送車とを備えた無人搬送システムであって、誘導ライン2Dは、異なる3つの色が順繰りに現れるように着色された3種類の着色領域2a、2b、2cを有し、無人搬送車は、撮像手段と、着色領域2a、2b、2cの色に基づいて目標速度を設定する目標速度設定部と、走行制御部と、3種類の着色領域2a、2b、2cの色の順番に基づいて走行方向を特定する走行方向特定部と、着色領域2a、2b、2cの色と走行速度との関係および3種類の着色領域2a、2b、2cの色の順番と走行方向との関係があらかじめ格納されており、かつ着色領域の色の履歴が格納される記憶部と、を有することを特徴とする。
(もっと読む)
無人搬送システム
【課題】マーカーを設けることなく無人搬送車の走行速度を制御することができる無人搬送システムを提供する。
【解決手段】路面に敷設された誘導ライン2Aと、該誘導ライン2Aに沿って所定の走行速度で走行する無人搬送車3とを備えた無人搬送システム1Aであって、誘導ライン2Aは、異なる色で着色された複数の着色領域2a、2bを有し、無人搬送車3は、誘導ライン2Aを含む領域の画像データを生成する撮像手段4a、4bと、生成された画像データにおける着色領域2a、2bの色情報に基づいて目標速度を設定する目標速度設定部5と、目標速度に一致するように走行速度をフィードバック制御する走行制御部7と、を有することを特徴とする。
(もっと読む)
搬送車システム
【課題】左右の車輪を独立して駆動可能な搬送車において、曲線部走行時にモータの過負荷を防止する。
【解決手段】搬送車システムにおいて、速度パターン発生部62は、搬送車が曲線部を走行するときに2個の走行車輪に対して基準速度に対して内外輪にそれぞれ速度差が生じるように、速度指令を発生して2個のモータ26,29に与える。速度パターン発生部62は、搬送車が加速中に曲線部に進入することを光電センサ47が検出すれば、第1速度比率変化区間において、外輪となる走行車輪に対応するモータに対して進入時の加速度a01以下の加速度となるような速度指令を生成して与え、内輪となる走行車輪に対応するモータに対して外輪となる走行車輪の速度より速度差分以上を減らした速度となるような速度指令を生成して与える。
(もっと読む)
搬送装置
【課題】 消費エネルギを最小化することのできる搬送装置を提供する。
【解決手段】 移動部2を駆動するためのアクチュエータ3と、軌道情報を生成する軌道情報生成部5と、アクチュエータを作動させるコントローラ4とを備える。軌道情報生成部は、アクチュエータにおける駆動エネルギを運動エネルギに変換するときのエネルギ変換効率に関する情報を記憶する効率情報記憶手段と、移動部が移動するときの特有の情報を記憶する特有情報記憶手段と、移動部の移動条件に関する情報を記憶する移動条件情報記憶手段と、移動部の運動特性に関する情報を記憶する運動特性情報記憶手段と、前記運動特性に基づき移動部の移動に要する駆動エネルギを算出する演算手段と、前記演算手段により算出されたエネルギをパラメータに含む評価関数の値が最小となる加速時、定速時および減速時の軌道情報を決定する軌道情報決定手段と備える。
(もっと読む)
有軌道台車システム
【課題】有軌道台車システムにおいて、分岐点及び合流点を通過する台車の不要な速度低下や走行停止を抑制する。
【解決手段】有軌道台車システムは、分岐点及び合流点を含む所定領域内に誘導線を有する軌道と、軌道に支持されると共に案内されて走行する複数の台車とを備える。複数の台車の各々は、互いに周波数の異なる複数の信号を夫々発信可能な発信手段910,920と、発信手段から発信された複数の信号を誘導線へと夫々送信する送信手段810,820と、誘導線を介して伝達された複数の信号を夫々受信可能な受信手段710,720と、受信手段において受信された信号の種類に基づいて、台車の減速若しくは停止、又は走行の続行を判定する判定手段955と、判定手段における判定結果に応じて台車の走行を制御する制御手段960とを有している。
(もっと読む)
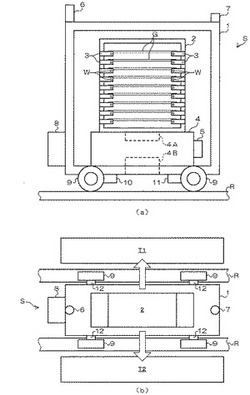
搬送用走行体の走行制御方法
【課題】走行速度可変の自走式搬送用走行体1を作業区間WAに一定の作業速度VLまで減速させた状態で進入させること。
【解決手段】各搬送用走行体1には、前後に隣り合う搬送用走行体1間でデータ通信を行うデータ通信手段13,14が設けられ、作業区間WAの上手側走行経路中には、計測起点P1が設定され、作業区間WAへ高速で接近する後ろ側搬送用走行体1Zとその前方の作業速度VLで走行する前側搬送用走行体1Yには、計測起点P1からの走行距離に相当する現在位置情報を持たせ、後ろ側搬送用走行体1Zでは、自体の現在位置情報と前記データ通信手段を介して受け取った前側搬送用走行体1Yの現在位置情報とに基づいて前側搬送用走行体1Yとの間の距離を演算させると共に当該距離の漸減変化に基づいて減速制御を行わせ、前記距離が設定値に達したドッキング完了時に後ろ側搬送用走行体1Zが作業速度VLで自走しているように制御する。
(もっと読む)
モータ駆動装置
【課題】ガイドレールで規定される軌道上を走行する、複数の車輪を備えた走行台車において、従来は車載コントローラから直接個々の駆動車輪の制御を行っているが、この方式では駆動軸数が増えるほどコントローラの処理能力が必要となる。
【解決手段】モータ駆動装置の制御演算部101は、コントローラ部102とドライバ部103を備えている。コントローラ部102は、車載コントローラ401から出力された台車位置指令104を入力として、指令分周逓倍比105で車輪位置指令106に変換され、これとモータ位置119を入力とする位置制御器107で車輪速度指令108を生成する。これに速度指令出力ゲイン109を乗じた結果が、速度指令出力110としてコントローラ部102から出力される。
(もっと読む)
搬送車システム
【課題】左右の車輪を独立して駆動可能な搬送車を用いた搬送車システムにおいて、曲線部走行時に搬送車がスムーズに走行可能とする。
【解決手段】搬送車システム1は、第1走行車輪25及び第2走行車輪28は、搬送車本体15の左右に設けられ、第1モータ26及び第2モータ29によって駆動される。前側ガイドローラ対81及び後側ガイドローラ対83は、第1走行車輪25の前側及び後側にそれぞれ設けられている。速度パターン発生部62は、搬送車3が曲線部203を走行するときに、前側ガイドローラ対81対及び後側ガイドローラ対83がガイドレール6に接触しない走行軌跡に基づいて作成した速度指令を第1モータ26及び第2モータ29に与える。
(もっと読む)
無人搬送車および走行制御方法
【課題】作業番地への停止において、精度の高いコンベアへの横付けが可能な無人搬送車および走行制御方法を提供することを目的とする。
【解決手段】コンベア12に設置されている反射板11へ光を照射し、反射板11から反射した信号光を受光することによって物体の存在を検出する光電センサを、無人搬送車1の側面前後にそれぞれ1つづつ備えるとともに、無人搬送車1とコンベア12とを検知する手段を備え、無人搬送車1の側面前後に備えられている光電センサの双方が反射板から反射した信号光を受光すると、操舵輪をコンベア12方向へ操舵し、無人搬送車1とコンベア12との距離が所定の距離となるまで無人搬送車1をコンベア12方向へ走行させることを特徴とする。
(もっと読む)
無人搬送車および走行制御方法
【課題】障害物を回避する無人搬送車および走行制御方法を提供することを目的とする。
【解決手段】経路データ上に、回避距離を予め設定しておき、進行方向前方に障害物1701を検知すると、回避距離だけ横行した後、前方へ走行することを特徴とする。また、回避距離は、回避方向と共に経路データにおける区間毎に設定されていてもよい。さらに、回避経路を走行中に取得した計測データに、障害物1701が検出されなくなったときから、車長+所定距離だけ前方に移動した後、元の経路1702に戻る。
(もっと読む)
自律式移動体
【課題】左右の障害物の間を伸びている移動可能経路に沿って移動するための並進速度と角速度を自律的に決定して移動する移動体を提供する。
【解決手段】障害物に当接するまでの移動距離が長いほど高くなる距離評価値と、並進速度に依存して変化する速度評価値を利用し、総合評価値が最大となる並進速度と角速度を採用する装置を備えている。速度評価値計算装置は、狭いコーナに接近した時に、並進速度がコーナ通過時最適速度以下の範囲内にあれば高速であるほど高い速度評価値を計算するとともに、並進速度がコーナ通過時最適速度以上であれば高速であるほど低い速度評価値を計算する。その他の場合には、速度評価値計算装置が、並進速度が高速であるほど高い速度評価値を計算する。
(もっと読む)
移動体
【課題】ランドマークを誤認識する可能性を低減することが可能な移動体を提供する。
【解決手段】予め設定された測定領域に存在するランドマーク25までの距離及び角度を計測するレーザレンジファインダ12と、前記測定領域を決定する測定領域決定部45を有し、レーザレンジファインダ12の計測結果に基づいて予め教示された走行経路上を走行するように走行を制御する制御装置34とを備える。
(もっと読む)
移動装置、移動方法およびプログラム
【課題】周辺に存在する対象物の状態に応じた合図でロボットの行動を認識させる。
【解決手段】移動装置100は、移動方向を示す方向指示部106と、周辺に存在する対象物の状態を認識する認識部102と、認識部102により認識された対象物の状態に応じて、方向指示部106により示される方向を制御する制御部104と、を備え、認識部は102、対象物と移動装置100との距離または対象物の移動速度を認識し、認識部102により認識された対象物と移動装置100との距離が短いほど、制御部104は、移動装置100のより詳細な移動経路を示すように方向指示部106を制御する。
(もっと読む)
物品搬送設備
【課題】走行台車による物品を搬送する速度の低下を避けながらも省エネルギー化を図ることができる物品搬送設備を提供する。
【解決手段】制御手段が、複数の物品移載箇所の間で物品を搬送する物品搬送作業を行わせるべく複数台の走行台車のうちから選択した作業用走行台車を、目標の物品移載箇所まで搬送用速度で走行させる搬送処理を実行するとともに、作業用走行台車と搬送処理における目標の物品移載箇所との間に、非作業用走行台車が存在する場合は、当該非作業用走行台車を、搬送用速度よりも低速の追い出し用速度で走行させて作業用走行台車の走行方向で目標の物品移載箇所よりも前方まで追い出す追い出し処理を実行する。
(もっと読む)
移動ロボット及びその走行安定化方法
【課題】移動体が段差を乗越えた際に発生する横方向振動を抑制する。
【解決手段】本発明による走行安定化装置はセンサ情報または地図情報を利用し、移動体と凹部凸部を含む段差との接触時点を予測し、アクチュエータを制御することで移動体の重心を左右方向に動かし、段差を乗越えたことを検出した際は次の段差に対応するように移動体の重心を左右に動かすことを特徴とする。
(もっと読む)
自律型清掃ロボット
【課題】移動中に、階段などのクリフに遭遇した場合に、転落を防ぐために床面におけるクリフの有無を適切に検出することが可能な自律型清掃ロボットを提供することを目的とする。
【解決手段】自律型清掃ロボットであって、シャーシと、シャーシに搭載され、自律型清掃ロボットを動かす駆動システムと、シャーシに保持され、床表面におけるクリフを検出する床近接センサと、を備える構成とした。また、床近接センサは、ビームを床表面に向かって発光するビーム発光器と、発光されたビームの前記床表面からの反射を受光するビーム受光器と、ビーム発光器およびビーム受光器をカバーするビーム透過蓋と、を備え、該ビーム透過蓋は、埃がたまることを防止するために、前方縁部が後方縁部よりも床面に対して高く位置する、進行方向に対して角度付された面を備えることを特徴とする。
(もっと読む)
移動体装置
【課題】操作者の操作意図を適切に推定し、ロボットを移動する。
【解決手段】ZMP検出手段22が、接地面(走行面)に沿って移動するロボットのZMPの位置を検出し、操作意図推定手段44が、ZMP検出手段22により検出される、操作者からロボットに対して加えられた力により移動したZMPの位置に基づいて、操作意図を推定し、移動手段42が、操作意図推定手段44により推定された操作意図に基づいてロボットを移動させる。
(もっと読む)
1 - 20 / 320
[ Back to top ]