
Fターム[5H303LL03]の内容
位置、方向の制御 (6,897) | 制御部、演算部の構成手段 (255) | デジタル回路を含むもの (214) | 計算機を含むもの (91)
Fターム[5H303LL03]に分類される特許
1 - 20 / 91
制御指令値生成プログラム、制御指令値生成方法および制御指令値生成装置
【課題】 一の入力指令値から複数の制御指令値を高精度かつ安定的に生成するとともにその際の演算負荷を低減することができる制御指令値生成プログラム、制御指令値生成方法および制御指令値生成装置を提供する。
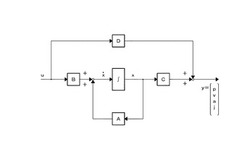
【解決手段】 コンピュータを、所定の入力指令値から当該入力指令値のn階までの微分(n≧0)で表せるn+1個の制御指令値を、入力数が1であり出力数がn+1である状態方程式を用いて生成するn次のデジタルフィルタとして機能させる。
(もっと読む)
ステージ移動装置及び無接点充電器

【課題】可及的に安価で、モータ制御が簡単なステージ移動装置を提供する。
【解決手段】ステージ移動装置1を、1個の正・逆回転可能なモータ100と、互いに直角に交差して配置され、交差部分にステージ600を保持するX軸方向キャリッジ400X及びX軸方向キャリッジ400Xと、モータ100の回転力をX軸方向キャリッジ400XをX軸方向に移動させる経路に伝達するか、Y軸方向キャリッジ400YをY軸方向に移動させる経路に伝達するかをステージ600の移動目標に応じて切り替える動力伝達経路切替手段と、モータ100の回転軸の回転運動をX軸方向キャリッジ400Xの直線往復運動又はY軸方向キャリッジ400Yの直線往復運動に変換する運動方向変換手段と、X軸方向キャリッジ案内手段及びY軸方向キャリッジ案内手段と、ステージ600の移動目標に応じてモータ100の回転方向及び回転角度を制御するモータ制御装置とで構成した。
(もっと読む)
同期制御装置
【課題】容易かつ遅れなしにカム曲線の切替が可能な同期制御装置を提供する。
【解決手段】カム曲線記憶部64は、第1のカム曲線および第2のカム曲線を記憶する。制御部66は、カム曲線の切替え前は、各制御タイミングで、第1のカム曲線上の値に基づいて、従動側部材への位置指令値を求め、カム曲線の切替え後は、各制御タイミングで、第2のカム曲線上の値に基づいて位置指令値を求め、カム曲線の切替期間は、各制御タイミングで、第1のカム曲線または従動軸の位置に基づく第1のデータと、第2のカム曲線に基づく第2のデータとを加重平均した値に基づいて従動側部材への位置指令値を求める。
(もっと読む)
位置決め制御装置
【課題】精密測定装置に振動等が発生した場合に位置決め制御装置の制御ゲインを調整する際、その調整時間の短縮化、及び、ゲイン調整に掛かる労力の軽減化を図ること。
【解決手段】位置決め制御装置100は、位置補償部10、速度補償部20、電流補償部30、設定テーブル40及びゲイン選択手段50を有する。位置補償部10は目標位置及び検出位置の位置偏差を得て、これに基づき目標速度を制御する。速度補償部20は、目標速度及び検出速度の速度偏差を得て、これに比例ゲインKpを掛けた値及び速度偏差の積分に積分ゲインKiを掛けた値の加算値をモータの目標電流として出力する。電流補償部30は、目標電流及びモータの検出電流の電流偏差を得て、これに基づいて駆動電流を制御する。ゲインKp、Kiの設定値の組合せが複数通り設定テーブル40に記憶されており、選択手段50で選択された組合せに各ゲインが書き換えられるようになっている。
(もっと読む)
位置補正装置およびレーザ加工機
【課題】移動装置の位置決め制御の精度の向上と加工速度の向上とを両立できる位置決め装置およびレーザ加工機を提供すること。
【解決手段】座標平面におけるレーザビームBの加工予定軌跡と目標軌跡との間で距離の最も近い2点の組が探索され、その2点間の各々の距離が算出される。算出された各々の距離に基づいて加工予定軌跡を作るための指令が補正されるので、加工予定軌跡を目標軌跡に近づけることができる。これらの処理は被加工物WにレーザビームBを照射する前に実行されるので、レーザ加工時における移動装置の位置決め速度(移動速度)を低下させることなく移動装置の位置決め制御の精度を向上できる。また、変位にヒステリシスをもつピエゾアクチュエータ等の移動装置であっても、ヒステリシスを考慮した補正ができる。
(もっと読む)
同期制御装置、同期制御方法、同期制御プログラム、および同期制御プログラムを記録したコンピュータ読み取り可能な記録媒体
【課題】従動軸に加わる衝撃を緩和し、かつ同期開始位置で確実に同期制御を開始することができる同期制御装置、同期制御方法、同期制御プログラム、および同期制御プログラムを記録したコンピュータ読み取り可能な記録媒体を提供する。
【解決手段】ユーザ指令部62は、主軸と従動軸とが同期を開始する同期開始位置を指定する。カム曲線作成部64は、カム曲線を作成する。検出部65は、毎制御周期ごとの主軸の位置情報を検出する。制御部66は、同期開始位置までは、カム曲線と主軸の位置情報とに基づいて、制御周期ごとに従動軸に対する速度指令値を算出し、同期開始位置以降は、主軸と従動軸とのギア比に基づいて、制御周期ごとに従動軸に対する速度指令値を算出し、算出した速度指令値で従動軸を制御する。
(もっと読む)
位置決め装置、露光装置およびデバイス製造方法
【課題】位置決め精度の向上に有利な技術を提供する。
【解決手段】位置決め装置は、ステージと、ベースと、前記ステージと前記ベースとの間に配置されていて、ばね性を有する支持部で前記ステージを支持する支持機構と、前記ステージを駆動するように前記ステージと前記ベースとの間に配置されたアクチュエータと、前記アクチュエータを制御する制御部とを備える。前記制御部は、目標位置に対する前記ステージの位置偏差と、前記ステージと前記ベースとの相対位置の変動量とに基づいて、前記位置偏差が低減され、かつ、前記支持部の前記ばね性によって前記ステージに作用する力の少なくとも一部が打ち消されるように前記アクチュエータを制御する。
(もっと読む)
制御装置および制御方法、並びにプログラム
【課題】新たなハードウェアを必要とせず、タクトタイムを変化させることなく、振動を抑制する。
【解決手段】パラメータ生成部102は、基準距離について、予め定めた移動時間毎に、可動部の加速度軌道から共振周波数に対応する周波数成分を除いた軌道を計算するためのパラメータを生成する。データベース103は、パラメータ生成部102から供給されたパラメータを記憶する。パラメータ決定部104は、可動部の加速度軌道から共振周波数に対応する周波数成分を除いた軌道を計算するためのパラメータを決定する。軌道計算部105は、決定されたパラメータから軌道を計算する。本発明は、ロボットを制御する制御装置に適用できる。
(もっと読む)
モータ制御装置及び画像形成装置
【課題】高速且つ高精度に、駆動対象を目標停止位置に停止可能とする。
【解決手段】モータ制御ユニットは、モータに入力可能な電流上限値を推定し、この上限値に対応する駆動電流でモータを駆動する第一制御処理を、駆動初期において実行する。一方、駆動対象の現動作状態に基づき、第二制御処理に対応するパターンで駆動対象を減速・停止させるのに必要な搬送量である停止必要量Pn=Pc+Pdを算出する。そして、目標停止位置までの残り搬送量Psが停止必要量Pn以下となった時点で、第一制御処理に代えて第二制御処理を実行する。この動作により、第一制御処理を長めに実行して駆動対象を高速に搬送し、第二制御処理では、上記パターンに対応する目標軌跡に追従するように駆動対象の位置P及び速度Vを制御して、駆動対象を精度よく目標停止位置で停止させる。目標軌跡は、減速時の加速度ピークが、モータで実現可能な限界値−Apに設定されてなる。
(もっと読む)
指令生成装置
【課題】目標位置が変更された場合であっても、可動軸に発生する衝撃や励起する振動を可及的に抑制しながら前記変更された目標位置までの補間動作を実行すること。
【解決手段】目標位置Xと可動軸の現在位置Cとの間を補間するように速度指令計算値vrを可動軸毎に算出する指令速度演算部と、直前に出力された速度指令出力値voと速度指令計算値vrとの差分である速度変更量Δvを可動軸毎に算出する速度変更量演算部と、可動軸毎の速度変更量Δvの全てが許容速度変更量Vmを越えない値となるように速度変更量Δvを制限する1つの補正ゲインRを算出する補正ゲイン演算部と、速度変更量Δvを補正ゲインRで制限した値と直前に出力された速度指令出力値voとを加算して次に出力する速度指令出力値voを可動軸毎に算出する指令速度出力部を備える。
(もっと読む)
演算ユニット、出力制御方法、およびプログラム
【課題】カムテーブルの切り換えを迅速に行なうことが可能なPLCの演算ユニットを提供する。
【解決手段】PLCのCPUユニットは、モーション制御とシーケンス制御とを実行する。CPUユニットは、カムテーブルを用いたモーション制御を行なうための制御プログラムと、第1のカムテーブルおよび第2のカムテーブルとを格納している。マイクロプロセッサは、制御プログラムの実行中に予め定められた指示を受け付けると、制御プログラムの実行に用いるカムテーブルを第1のカムテーブルから第2のカムテーブルに切り換える。マイクロプロセッサは、カムテーブルの切り換えに基づき、第2のカムテーブルを用いた制御プログラムの実行結果を制御対象機器に出力する。
(もっと読む)
弁開度制御システム
【課題】開又は閉指令を、開度に対応した時間、出力することで、弁を目標開度に操作する場合、目標開度近くで開/閉方向の反転動作を頻繁に繰り返すことなく、目標開度とすることが可能な弁開度制御システムを提供する
【解決手段】弁11を所望の開度に開閉制御する弁開度制御システムであって、弁11の開閉速度に基づき、設定された所望の目標開度に達するまでの開又は閉指令の出力時間を出力時間演算手段17で求め、 この出力時間の間、出力手段と18により弁11に開又は閉指令を出力する。この際、弁11の実測開度を開度制御手段19に入力し、この実測開度と目標開度との差が、予め設定した不感帯の範囲に入ると、弁11に対する開又は閉指令の出力を停止させる。
(もっと読む)
演算ユニット、出力制御方法、およびプログラム
【課題】装置機差の微調整および電子カム動作中における従軸の動作の変更を容易に実現可能なPLCの演算ユニットを提供する。
【解決手段】PLCのCPUユニットは、モーション制御とシーケンス制御とを実行する。CPUユニットは、カムテーブルを用いたモーション制御を行なうための制御プログラムと、カムテーブルとを格納している。マイクロプロセッサは、複数の位相のうちのいずれかの位相および当該位相に対応付けられた変位の少なくともいずれかを変更するための指令を受け付けると、カムテーブルにおける当該位相および変位の少なくともいずれかを当該指令に基づいた値に変更する。マイクロプロセッサは、上記変更が行なわれると、変更された後のカムテーブルを用いて制御プログラムを実行し、当該実行結果を制御対象機器に出力する。
(もっと読む)
位置決め制御装置
【課題】位置決めの完了判定や現在位置の取得の高速化が可能な位置決め制御装置を提供する。
【解決手段】所定の位置制御周期で制御対象の現在位置情報をサンプリングし、目標位置情報と現在位置情報との位置偏差に基づいて制御対象の位置決め用の制御量を出力する位置制御部と、この位置制御部から出力された制御量に基づいて制御対象を駆動する駆動部とを備え、位置制御部は、過去から現在に至る複数回のサンプリングによって得られた現在位置情報を一時記憶するバッファと、バッファに記憶された複数の現在位置情報から所定の統計値を算出する演算処理部とを備える。
(もっと読む)
媒体搬送装置
【課題】コストの増大を招くことなく、複数の制御部による同期制御を実現する媒体搬送装置を提供する。
【解決手段】媒体搬送を行う媒体搬送装置に、媒体を搬送する第1搬送手段606と、第1搬送手段を制御する第1下層制御手段602と、第1搬送手段により搬送された媒体を受け取り、受け取った媒体を搬送する第2搬送手段609と、第2搬送手段を制御する第2下層制御手段605と、第1下層制御手段および第2下層制御手段を統括的に制御する上層制御手段601と、第1下層制御手段および第2下層制御手段に接続された媒体検知手段256とを設け、第1下層制御手段および第2下層制御手段は、媒体検知手段からの信号に基づいて同期して第1搬送手段および第2搬送手段を制御する同期駆動を行う。
(もっと読む)
アクチュエータ用駆動制御装置及びアクチュエータの駆動制御方法
【課題】アクチュエータが備える変位部材の移動距離及び移動時間を設定するだけで、変位部材の詳細な動作を決定し、該変位部材を精度よく変位させる。
【解決手段】アクチュエータ用駆動制御装置10は、変位部材16の移動距離を設定する移動距離領域30と、移動時間を設定する移動時間領域32と、移動距離及び移動時間に基づいて任意のタイミングにおける変位部材16の変位量又は変位速度の目標値を演算する目標値演算部40と、変位部材16の変位量又は変位速度の目標値に基づいて駆動電力Pを生成して、該駆動電力Pをアクチュエータ12に送る駆動制御部26と、を備える。
(もっと読む)
サーボ制御器
【課題】2自由度制御構成のサーボ制御器において、用いる位置検出器の分解能が低くてもフィードフォワード制御器からフィードバック制御器へ与える操作量に生ずるリップルを確実に低減でき、高い追従性による高精度制御を可能にするサーボ制御器を得ること。
【解決手段】指令生成器10は入力される位置指令Aをコントローラ2の分解能から位置検出器5の分解能よりも高い分解能の内部位置指令150へ変換する。フィードフォワード制御器11aは、内部位置指令150を元に微分器110、フィルタ111を用いて速度フィードフォワード成分152を生成し、それを元に微分器112、フィルタ113を用いてトルクフィードフォワード成分154を生成する。内部位置指令150の分解能は位置検出器5の分解能よりも高いので、フィードフォワード成分152,154に生ずるリップルは位置検出器5の分解能を有する内部位置指令を用いる場合よりも低減される。
(もっと読む)
送り装置
【課題】サーボロック時の消費電力を削減することができる送り装置を提供する。
【解決手段】送り装置1は、ボールねじ21,ナット23,駆動モータ24,ブレーキ機構25及び制御装置50を備え、移動体13を上下方向に移動させる。制御装置50は、移動体13に関する早送りの移動指令を認識すると、移動体13を現在位置から上方向に移動させる場合には、早送りの移動指令に係る目標移動位置を越えて移動体13を移動させた後、移動方向を反転させて目標移動位置に移動体13を移動,停止させる一方、現在位置から下方向に移動させる場合には、移動体13を目標移動位置に直接移動,停止させるとともに、移動体13を目標移動位置に移動,停止させた後、駆動モータ24によって移動体13の位置を停止位置に維持し、且つブレーキ機構25によって移動体13の移動を制動する。
(もっと読む)
電動アクチュエータ
【課題】制御手段に位置データを送信する際に、外来ノイズの影響を受けにくい電動アクチュエータを提供する。
【解決手段】ロッド24と一体となって収容孔13内を摺動する移動体はマグネット28を保持している。ボディ12に形成された取付溝12aには、第1の位置検出装置29および第2の位置検出装置30が取り付けられている。各停止位置検出装置29,30は、マグネット28を検出していないとき、Lレベルの信号を制御コントローラ40に出力している。一方、ロッド24と移動体が収容孔13内を移動し、各停止位置検出装置29,30がマグネット28を検出すると、Hレベルの信号を制御コントローラ40に出力する。
(もっと読む)
産業機械および産業機械の制御方法
【課題】 短時間で容易かつ確実に原点位置の検出ができる産業機械および産業機械の制御方法を提供する。
【解決手段】 三次元測定機1は、所定の軸方向へ制御対象物を移動させるスピンドル2と、スピンドル2を移動させる駆動力を発生する駆動モータ3と、スピンドル2の位置を制御するとともに駆動モータ3の回転速度を制御する制御装置4とを備えるものであって、スピンドル2の位置に基づく信号を検出するインクリメンタル型のリニアエンコーダ11と、駆動モータ3の絶対角度に基づく信号を検出するアブソリュート型のロータリーエンコーダ12とを備える。
(もっと読む)
1 - 20 / 91
[ Back to top ]