
Fターム[5H501BB04]の内容
Fターム[5H501BB04]に分類される特許
1 - 20 / 118
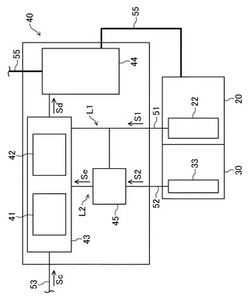
回転駆動装置及びロボット装置
【課題】高度な制御が実現でき、産業ロボット等に好適な回転駆動装置を提供する。
【解決手段】トラクション方式の減速機30や指令信号に基づいてモータ20の出力を制御する駆動制御機構40を備えた回転駆動装置10である。減速機30の入力側に第1ロータリエンコーダ22、減速機30の出力側に第2ロータリエンコーダ33を有している。駆動制御機構40は、指令信号Scと第1検出信号S1とに基づいてモータ20の出力を制御する制御信号Sdを生成する出力制御部43、制御信号Sdに従うドライバ44、第1検出信号S1と第2検出信号S2とを比較して、減速機30の入力と出力との間の誤差を演算する誤差演算部45を有している。出力制御部43が誤差演算部45の演算結果に基づいて制御信号Scを補正する。
(もっと読む)
キャパシタプリチャージ回路、モータ駆動システム、電動パワーステアリングシステム、エアバッグシステム

【課題】キャパシタプリチャージ回路における損失(発熱)を低減させ、回路を小型化する。
【解決手段】本発明に係るキャパシタプリチャージ回路は、スイッチドキャパシタ分圧回路を用いて電源電圧を分圧することにより、チャージ対象であるキャパシタの両端電圧を抑制しながら充電する。
(もっと読む)
モータシステムおよびモータ制御装置
【課題】複数機種のモータが接続可能なモータ制御装置を有するモータシステムにおいて、モータ側の記憶容量を低減させるとともに、電源投入時等の初期動作の時間を短くすることが可能なモータシステムを提供する。
【解決手段】モータシステム1において、複数機種のモータ2が接続可能なモータ制御装置3は、モータ2の機種ごとに設定される複数の制御パラメータ群14a〜14eが記憶される記憶部11と、モータ2を駆動制御するモータ制御部10を備え、モータ2は、モータ2の機種コードが記憶されるモータ側記憶部7を備えている。モータ制御装置3は、モータ側記憶部7に記憶されている機種コードを読み出して、読み出された機種コードに対応する制御パラメータ群14a〜14eを記憶部11の中から選択するとともに、選択された制御パラメータ群14a〜14eの各制御パラメータをモータ制御部10に設定してモータ2を制御する。
(もっと読む)
モータ駆動回路、および、モータ駆動システム
【課題】MCUの限られた数のポートで伝達する情報の種類を増加させる。
【解決手段】モータ駆動回路は、MCU300が出力した信号が入力される第1のポートP1を備え、第1のポートP1を介して入力された入力信号のデューティを測定し、デューティ情報信号を出力するデューティ測定回路100aと、入力信号の周波数を測定し、この測定した周波数に応じた周波数情報信号を出力する周波数測定回路100bと、デューティ情報信号および周波数情報信号の何れか一方に基づいて、MCU300が指令したモータの回転速度を計算し、この計算した回転速度の情報を含む回転速度情報信号を出力する指令速度計算回路100cと、回転速度情報信号と、デューティ情報信号および周波数情報信号の残りの他方により得られた情報とに基づいて、モータを指令された回転数で駆動するためのPWM信号である駆動制御信号を生成するモータ駆動波形制御回路100eを備える。
(もっと読む)
モータ駆動装置の状態表示装置
【課題】セグメント表示器の個数の増大を抑制しつつ、セグメント表示器に表示されるモータ駆動装置の状態の数を増やすことが可能なモータ駆動装置の状態表示装置を提供する。
【解決手段】異常判定手段8はモータ駆動装置7の異常を判定し、異常パターン出力部9は、モータ駆動装置7の異常の種類に応じた文字や記号を7セグメント表示器11に表示させるとともに、異常レベル出力部10は、モータ駆動装置7の異常の程度に応じて7セグメント表示器11に表示されている文字や記号を点滅させるように指示することで、1個のセグメント表示器11に文字や記号を割り当てた上で点滅パターンも割り当てるようにする。
(もっと読む)
電気推進システムにおける電動機制御方法
【課題】蓄電池とこの蓄電池を充電する発電機からなるハイブリッド電源を備えた電気推進システムにおいて、蓄電池電圧,電動機受電端電圧の異常低下を簡単かつ低コストに防止する。
【解決手段】電動機(M)6の入力電圧VMを検出器(VD)9により検出し、これが予め設定された制限開始設定電圧VMAを超えたら、予め設定されている回転速度(入力電流)制限線Yをもとに、速度指令制限部13により回転速度(入力電流)制限線を超えない回転速度を求め、これをもとに回転速度を制限して電動機(M)6を運転することで、掲記課題を装置の小型化,軽量化およびコストダウンにより実現する。
(もっと読む)
画像形成装置、画像形成装置の制御方法、および画像形成装置の制御プログラム
【課題】装置の小型化を図ることのできる画像形成装置、画像形成装置の制御方法、および画像形成装置の制御プログラムを提供する。
【解決手段】画像形成装置としてのMFPは、縦搬送モータ100と、本体側制御基板200と、センサ1および2とを備えている。縦搬送モータ100において、エンコーダ103は、縦搬送モータ100の回転数に応じた周波数を有するエンコーダ信号405を発生し、センサ信号重畳部113は、センサ1および2の論理状態の入力を受け付ける。センサ信号重畳部113は、センサ1および2の論理状態に基づいて、エンコーダ信号405のデューティ比を変調することにより、エンコーダ信号405にセンサ1および2の論理状態を重畳し、重畳後のエンコーダ信号401を出力する。本体側制御基板200において、センサ信号分離部203は、入力されたエンコーダ信号401を復調することにより、センサ1および2の論理状態を得る。
(もっと読む)
電動機駆動装置
【課題】装置全体としての長寿命化を図りつつ、装置全体としての小型化を可能とする電動機駆動装置を提供する。
【解決手段】駆動部12は、横型半導体素子からなる1回路2接点式の切替素子16,17を2つ有している。第1の切替素子16は、コモン端子160を電動機11に接続し、第1の端子161および第2の端子162を電源部15に接続する。第2の切替素子17は、コモン端子170を電動機11に接続し、第1の端子171および第2の端子172を電源部15に接続する。制御部14は、各切替素子16,17において、コモン端子160,170が、第1の端子161,171および第2の端子162,172に対して択一的に接続されるように、各切替素子16,17を個別に切替制御する。
(もっと読む)
モータ制御装置
【課題】基板を精度良く位置決めすることにより、モータ制御装置の小型化を図ることができるようにする。
【解決手段】インバータ装置1は、ネジ19を挿通可能な4つのネジ通し穴141を有し、モータの駆動に関わる電子回路が設けられた1つの基板14と、基板14が取り付けられるヒートシンク12と、ヒートシンク12に立設され、基板14が載置される基板載置面151,161を有する4つのボス15,16とを備え、2つのボス16は、基板14のネジ通し穴141以外の縁端142と当接する突起部163を基板載置面161に有している。
(もっと読む)
モータ駆動電流アンプとモータ駆動装置とその駆動方法とモータ駆動システム
【課題】特性の異なる複数の種類のモータに対しても、信頼性高く良好に適用可能であり安定してモータを駆動できる、モータ駆動電流アンプとモータ駆動装置とその駆動方法とモータ駆動システムとを提供することを目的とする。
【解決手段】駆動対象となるモータへの出力電流リップルを検出する出力電流リップル検出部と、出力電流リップル検出部が検出した出力電流リップルに対応して、モータへの出力電流を制御する制御特性を変更するPID制御部と、PID制御部から出力信号が入力されて、PWM制御を遂行するPWM制御部と、PWM制御部から出力されるPWM信号に対応してスイッチング素子のオン・オフが制御されるフルブリッジ回路とを備えるモータ駆動装置とする。
(もっと読む)
パルス生成回路及びモータ装置
【課題】大規模なメモリを用いることなく、かつ、MPUの処理の負荷を低減できるパルス生成回路を提供する。
【解決手段】本発明に係るパルス生成回路は、MPU101からの指示に応じて、モータの回転速度をS字曲線制御するためのパルス信号112を生成するパルス生成回路100であって、MPU101から供給される、S字曲線の特性を示すパラメータ110を用いて、モータの回転速度をS字曲線制御するための、パルス信号112を変化させるタイミングを示すパルス特性111を所定の区間ごとに算出するS字曲線演算回路106と、パルス特性111を保持する特性レジスタ103と、特性レジスタ103に保持されるパルス特性111で示されるタイミングで変化するパルス信号112を生成するパルス出力回路107とを備える。
(もっと読む)
モータ制御装置
【課題】DCモータ制御及びACモータ制御の両機能を兼用する際に、DCモータとACモータとの切り替えを、小規模及び低コストにて実現する。
【解決手段】制御部10の磁束電流指令AC/DC切替部11は、磁束指令部121から磁束電流指令を入力し、切替信号を入力し、切替信号がACを示す場合、入力した磁束電流指令を出力し、切替信号がDCを示す場合、予め設定されたデータ0の磁束電流指令を出力する。電気角AC/DC切替部12は、電気角計算部130により計算された電気角を入力し、切替信号を入力し、切替信号がACを示す場合、入力した電気角を出力し、切替信号がDCを示す場合、予め設定された固定の電気角330°を出力する。電圧指令2相−3相変換部131は、DCモータ105を駆動する場合、絶対値が等しく逆相となるU相電圧指令及びV相電圧指令、並びにデータ0のW相電圧指令を生成する。
(もっと読む)
送風装置用制御回路及びそれを用いた送風装置
【課題】ホール素子と駆動ICを1パッケージ化した送風装置用制御回路であっても、ホール素子の出力電圧を容易に確認することができ、その結果、設計の際にマグネットと送風装置用制御回路との距離を確実に決定できるので、送風装置用制御回路の制度を向上させ、動作の安定した送風装置を製造することができる送風装置用制御回路及びそれを用いた送風装置を提供することを目的とする。
【解決手段】ブレードを回転させて風を発生させる送風装置に備えられる送風装置用制御回路であって、ブレードの回転を制御する駆動IC72と、2つの出力端子を備え、ブレードの回転を検知するホール素子71と、を内蔵して備え、2つの出力端子の出力電圧の差動出力を出力するホール素子差動出力端子704を設けたことを特徴とする送風装置用制御回路である。
(もっと読む)
モータ制御回路
【課題】簡素なデジタル回路を用いて構成され、広範な制御レンジでゲインを調整可能なモータ制御回路を提供する。
【解決手段】モータ駆動制御部90は、トルク指令データと第3の基準クロックとに応じて、モータ100を駆動する。トルク指令データは、第1の基準クロックとFG信号とに応じて速度誤差検出部40が出力する速度誤差データと第2の基準クロックとFG信号とに応じて位相誤差検出部60が出力する位相誤差データとが加算回路80で加算されて生成される。速度誤差データ及び位相誤差データは、それぞれ、速度検出用値設定部51及びカウント値設定部53、又は位相検出用値設定部71及びカウント値設定部73により設定される所定の範囲で出力される。第3の基準クロックの周波数を固定したままの広範な制御レンジで、第1及び第2の基準クロックの周波数を調整することによって、制御ゲイン及び制御範囲を設定できる。
(もっと読む)
モータ
【課題】全節巻きリラクタンスモータの電磁気的特性は複雑であり、効果的に制御できるモータシステムとする。また、このモータの高効率化、小型化を実現する。
【解決手段】全節巻きリラクタンスモータにおいて、一つの相の一組のステータ磁極にだけ電磁気的に作用する一組の電流成分を想定し、3相各相の電流成分を制御することにより他の相との電磁気的相互作用の無い正確な電流制御を実現し、より正確なトルク制御、速度制御を行うことのできるモータシステムを実現する。また、前記の電流、電圧制御により制御回路の小型化と効果的な界磁手段を付加したモータ構成による高効率化を実現する。
(もっと読む)
充放電回路およびモータ駆動回路
【課題】スイッチの切り換えタイミングを検出する回路などが必要でなく全体の回路構成が簡単であり、電圧降下の少ないこと。
【解決手段】電気二重層キャパシタ21と電流制限回路22とを備え、電流制限回路22は、電気二重層キャパシタに流れる電流を制御するFET23と、FETに流れる電流を検出する第1の抵抗R1と、FETのゲートに電圧を印加する第2の抵抗R2と、FETのゲートに接続され、第1の抵抗によって検出された電流が所定以上になったときにオンして当該FETをオフするように接続されたトランジスタ24と、を備え、第2の抵抗R2は、電気二重層キャパシタ21のFET23が接続された端子とは異なる他方の端子とFET23のゲートとの間に接続されてなる。
(もっと読む)
自動製パン器
【課題】供給される交流電力の周波数の影響を簡易的に抑制する自動製パン器を提供する。
【解決手段】自動製パン器は、混練モータ50及び粉砕モータ60と、これらのモータを駆動するための交流電力を供給する電源部121aと、電源部121aが供給する交流電力の周波数を検知する電源周波数検知回路125と、上記のモータの駆動を制御する制御装置120と、を備える。制御装置120は、電源周波数検知手段125が検知する、電源部121aが供給する交流電力の周波数に応じて、上記のモータを駆動させる時間の長短を調整する。
(もっと読む)
電動パワーステアリング装置
【解決手段】操舵トルク信号と車速信号とを、それぞれアナログ値からPWM変換して2つのPWM信号を生成し、両PWM信号を合成し、この合成されたPWM信号に基づいて、電動モータを駆動する。PWM変換は、同一の三角波発生回路55によって発生される同期された三角波を用いて行う。
【効果】PWM変換回路51,53などのアナログ回路を採用することにより、演算誤差の少ない電動パワーステアリング装置を実現することができる。
(もっと読む)
産業機器の回転関節制御装置
【課題】減速機を使用して回転負荷にトルクを供給するトルク制御において、駆動状態あるいは制動状態といったトルクの供給状態を検知する。
【解決手段】本発明は、回転負荷83に対して回転動力を供給する回転関節装置が発生させるトルクを制御する回転関節制御装置71を提供する。回転関節装置は、駆動トルクを発生する駆動トルク発生部51と、所定の回転比で変速された回転数の回転動力を所定の効率で出力する出力軸を有する変速装置30と、出力側トルクを伝達するトルク伝達構造とを有する。回転関節制御装置71は、変速装置30が出力軸に回転動力を出力している伝達状態である駆動状態と、変速装置30が入力軸に回転動力を出力している伝達状態である制動状態とを判定する伝達状態判定部71aを備える。伝達状態判定部71は、駆動トルクと回転比の積である無損失トルクと、出力側トルクとの比較に基づいて駆動状態と制動状態と判別する。
(もっと読む)
制御装置
【課題】装置の小型化を図ること。
【解決手段】制御回路100は、CPU10と、CPU10で動作させる第1のプログラムを記憶するフラッシュメモリ22を有するCPU20と、第1のプログラムをCPU10に読み込ませる第2のプログラムを記憶するROM33とを有している。CPU10は、読み出した第2のプログラムを実行することで第1のプログラムの読み込み準備完了をCPU20に通知する。CPU20は、第1のプログラムの読み込み準備完了に基づいて、CPU10への第1のプログラムの転送を開始する。
(もっと読む)
1 - 20 / 118
[ Back to top ]