
Fターム[5H501GG08]の内容
Fターム[5H501GG08]の下位に属するFターム
Fターム[5H501GG08]に分類される特許
1 - 20 / 91
モータ制御装置
制振制御装置
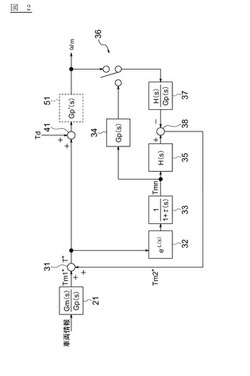
【課題】フィルタへの余剰トルク成分の蓄積を抑制する制振制御装置を提供する。
【解決手段】車両に設けられたモータを制振させる制振制御装置において、車両の車両情報を入力として、車両へのトルク入力と前記モータの回転速度の理想伝達特性のモデルGm(s)と、車両へのトルク入力とモータの回転速度の実伝達特性のモデルGp(s)とを用いたモデルGm(s)/Gp(s)を含むフィルタにより第1トルク目標値を算出する第1トルク目標値算出手段と、モータの回転速度を検出するモータ回転速度検出手段と、モデルGp(s)を含むフィルタを用いて、トルク指令値及び回転速度検出手段により検出された検出回転速度に基づいて、第2トルク目標値を算出する第2トルク目標値算出手段と、第1トルク目標値と前記第2トルク目標値とを加算してトルク指令値を算出する加算手段と、トルク指令値に基づいて、モータを制御するモータ制御手段とを備える。
(もっと読む)
電動機の制御装置、制御システム及び制御方法

【課題】電動機のトルクを、安定して高い精度で制御できる、電動機の制御装置、制御システム及び制御方法を提供する。
【解決手段】永久磁石同期電動機の回転軸に、半導体歪みセンサの出力を無線送信する無線送信装置を取り付ける一方、電動機本体に無線送信装置からの送信を受信する無線受信装置を設ける。電動機を駆動制御する制御装置は、無線送受信装置を介して歪みセンサの出力を入力し、電動機のトルクを検出し、トルク検出値とトルク指令値との偏差に基づき、電動機のPWM制御信号を演算して出力する。これにより、電動機における電流とトルクとの相関が、永久磁石の温度変化や劣化によって変動しても、電動機のトルクを高精度に制御できる。
(もっと読む)
モータ制御装置
【課題】単相のエンコーダ信号によって三相スイッチング制御を実行する。
【解決手段】エンコーダ8は、二相のエンコーダ信号PA、PBを出力する。二相制御手段17は、両方のエンコーダ信号PA、PBに同期して励磁相を切換える。ひとつのエンコーダ信号だけが失われると、単相制御手段18によってモータ7が制御される。単相制御手段18は、失われたエンコーダ信号に代わって切換時期を推定する推定手段23を備える。単相制御手段18は、初期にオープン制御手段25によるオープン制御を実行する。オープン制御によってモータ7の回転が安定すると、単相フィードバック制御手段24による制御へ移行する。単相フィードバック制御手段24は、正常なエンコーダ信号と、推定された切換時期との両方に応答して励磁相を切換える。この結果、単相だけでもモータ7の制御が実行される。
(もっと読む)
モータ駆動装置
【課題】速度制御から位置制御への切替をシームレスに行い、機械伝達系に衝撃を与えないモータ駆動装置を提供する。
【解決手段】モータ駆動装置から前記上位コントローラ1への伝送遅れ時間の間のモータ移動量と、前記上位コントローラからモータ駆動装置への伝送遅れ時間の間のモータ移動量と、前記上位コントローラ1からモータ駆動装置への伝送遅れ時間の間のモータ移動量とを現在位置35に加算して前期の速度制御時指令位置37とし、速度制御から位置制御への切替時において、前回の前記速度制御時速度指令28から算出される位置偏差量を位置偏差24の初期値とするとともに、前記位置指令生成手段2において、前記位置偏差量を現在位置35に加算したものを位置制御時指令位置36の初期値として設定した後、前記目標位置指令21による位置制御を行うモータ駆動装置である。
(もっと読む)
モータ駆動装置
【課題】最適なゲイン設定ができるゲイン切換判定手段を有したモータ駆動装置を提供する。
【解決手段】トルク指令25どおりにモータを駆動させるよう制御する電流制御手段3と、ゲイン切換信号34で選択されたゲインで制御する速度フィードフォワード手段4と、ゲイン切換信号34で選択されたゲインで制御するトルクフィードフォワード手段5と、モータ速度30を算出する速度検出手段6と、位置指令速度31を算出する位置指令速度検出手段7と、ゲイン切換信号34をオン/オフするゲイン切換判定手段8と、判定遅延時間設定手段9と、判定閾値設定手段10とを有し、ゲイン切換判定手段8にて判定遅延時間32経過後の位置指令速度31の絶対値が判定閾値33以下であればゲイン切換信号34をオンし、判定閾値33より大きい場合はゲイン切換信号34をオフのままとする。
(もっと読む)
負荷適応型制御ループ切り替え方法及び負荷適応型帰還制御装置
【課題】従来の制御ループの切り替え方法では、制御ループの切り替え時に制御対象回路が不安定になる問題があった。
【解決手段】本発明の制御ループの切り替え方法は、第1の誤差積分値INTG1に第1の誤差値ERR1を加算して第1の誤差積分値INTG1を更新し、第2の誤差積分値INTG2に第2の誤差値ERR1を加算して第2の誤差積分値INTG2を更新し、更新後の第1の誤差積分値INTG1と第2の誤差積分値INTG2とのうち小さな値を示す誤差積分値に基づきPWM信号のデューティ比を決定し、更新後の第1の誤差積分値INTG1とINTG2第2の誤差積分値とのうち小さな値を示す誤差積分値で更新後の第1の誤差積分値INTGと第2の誤差積分値INTG1のうちPWM信号のデューティ比の決定に用いられなかった誤差積分値を更新する。
(もっと読む)
モータ駆動装置
【課題】モータ駆動用の電源に異常が起きた場合であっても、モータを良好に駆動し続けることが可能なモータ駆動装置を実現する。
【解決手段】モータ駆動装置において、モータのコアに第1巻線と第2巻線とが巻回され、第1巻線及び第2巻線のうち、第1巻線のみに電流が流れるように第1巻線と接続している第1電源と、第1巻線及び第2巻線のうち、第2巻線のみに電流が流れるように第2巻線と接続している第2電源と、第1電源及び第2電源のうち、モータを駆動するために使用する電源を選択する選択部と、を有する。選択部は、第1電源が正常であるときには、第1電源からの電流が第1巻線に流れるように、第1電源が異常であるときには、第2電源からの電流が第2巻線に流れるように、モータを駆動するために使用する電源を選択する。
(もっと読む)
主軸駆動用モータの制御装置
【課題】主軸にかかる負荷が大きい場合はモータと主軸との間にスリップが発生し、主軸位置検出結果をモータ速度のフィードバック制御に利用するとモータ速度の制御が不安定になるという問題が生じていた。
【解決手段】本発明の制御装置は、位置指令値に従って電流指令値を出力する速度制御部と、モータに流れる電流を検出する電流検出部と、電流に基づいてモータの第1速度を推定する第1速度推定部と、主軸の近傍に設けられたセンサにより検出される主軸位置に基づいて算出される主軸速度及び変速比に基づいてモータの第2速度を推定する第2速度推定部と、モータ負荷の値を算出する負荷演算部と、を有し、速度制御部は、モータ負荷の値が所定の値以上の場合は第1速度を用いて電流指令値を算出し、モータ負荷の値が所定の値未満の場合は第2速度を用いて電流指令値を算出する、ことを特徴とする。
(もっと読む)
モータ制御装置及びモータ制御方法
【課題】一定期間、予め設定されたトルクを出力させて、モータを目標停止位置に停止させることができるモータ制御装置及びモータ制御方法を提供する。
【解決手段】モータ制御装置10は、トルク指令に基づいて、モータMを駆動する電流を出力する電力変換部12と、モータMの速度指令とモータMのモータ速度との偏差に基づいて、トルク指令を生成する速度制御部14と、モータMの速度制御中に、モータMのモータ位置を検出する位置検出器PGの1回転当たりの基準位置を最初に検出した後、モータMを位置制御する定位置停止制御部20とを備える。
(もっと読む)
モータ制御装置
【課題】DCモータ制御及びACモータ制御の両機能を兼用する際に、DCモータとACモータとの切り替えを、小規模及び低コストにて実現する。
【解決手段】制御部10の磁束電流指令AC/DC切替部11は、磁束指令部121から磁束電流指令を入力し、切替信号を入力し、切替信号がACを示す場合、入力した磁束電流指令を出力し、切替信号がDCを示す場合、予め設定されたデータ0の磁束電流指令を出力する。電気角AC/DC切替部12は、電気角計算部130により計算された電気角を入力し、切替信号を入力し、切替信号がACを示す場合、入力した電気角を出力し、切替信号がDCを示す場合、予め設定された固定の電気角330°を出力する。電圧指令2相−3相変換部131は、DCモータ105を駆動する場合、絶対値が等しく逆相となるU相電圧指令及びV相電圧指令、並びにデータ0のW相電圧指令を生成する。
(もっと読む)
モータ制御装置
【課題】高速且つ高精度に駆動対象を所望状態に移行させることが可能なモータ制御技術を提供する。
【解決手段】制御システム1のモータ制御ユニット60は、第一制御ユニット70及び第二制御ユニット80を備え、制御プロセス初期においては、第一制御ユニット70から出力される電流指令値U1をモータドライバ30に入力し、制御プロセス後期においては、電流指令値U1に代えて、第二制御ユニット80から出力される電流指令値U2を、モータドライバ30に入力する。第一制御ユニット70は、逆起電力による電流低下を加味して電流上限値Umaxを推定し、これを電流指令値U1として出力するものであり、モータ20の高速駆動を実現する。一方、第二制御ユニット80は、フィードバック制御系及びフィードバック制御系から構成され、制御プロセス後期において動作して、モータ20を高精度に駆動制御し、高精度に駆動対象を目標とする状態に移行させる。
(もっと読む)
モータ駆動装置及びモータ駆動車両
【課題】トルク制御と速度制御の切り換えタイミングと、クラッチの接続/分離タイミングとの不一致の問題に対処するためのモータ制御技術を提供する。
【解決手段】モータ駆動装置が、上位トルク指令に応答して第1トルク指令を生成するトルク制御手段と、上位速度指令と3相モータのロータ回転数とに応答して第2トルク指令を生成する速度制御手段と、第1トルク指令と第2トルク指令のいずれかから選択された選択トルク指令に応答してインバータを制御するインバータ制御手段と、クラッチを接続状態と分離状態の間で切り替えるクラッチ制御手段とを備えている。選択トルク指令は、クラッチの切り替えに対応して第1トルク指令と第2トルク指令のいずれかから選択される。トルク制御手段は、ロータ回転数の絶対値が所定の速度制限値を超えた場合、第1トルク指令の絶対値が上位トルク指令の絶対値より小さくなるように第1トルク指令を生成する。
(もっと読む)
回転機の制御装置
【課題】過変調領域においてモデル予測制御を行なうと、制御量の平均値と指令値との間に乖離が生じること。
【解決手段】操作状態決定部34の評価関数Jは、電圧ベクトルVi(i=0〜7)のそれぞれに対応する予測電流ide,iqeと指令電流idr,iqrとの差が小さいほど、該当する電圧ベクトルを高く評価する。評価関数Jの評価が最も高い電圧ベクトルが次回の操作状態に設定される。位相遅れ補償器50,60では、予測電流ide,iqeの高調波成分を減衰させる処理を行なう。過変調領域において、評価関数Jの入力パラメータを予測電流ide,iqeそのものから位相遅れ補償器50,60の出力に切り替える。
(もっと読む)
PID制御器のモード切替装置
【課題】PID制御器の動作モードを手動モード及び自動モードに切り替える場合、モードの切替によって発生する衝撃を除去し、安定してモードを切り替えることができるPID制御器のモード切替装置を提供すること。
【解決手段】本発明は、手動モード切替信号及び自動モード切替信号に応じて、自動モード及び手動モードのPID演算を行って、駆動信号を発生するPID演算部、前記手動モード切替信号が発生した場合、前記PID演算部が発生する駆動信号を処理して、負荷駆動機に出力する手動モード緩衝部、及び、前記自動モード切替信号が発生した場合、前記PID演算部が発生する駆動信号を分析して、前記PID演算部に出力する速度差積分信号計算部を含む。
(もっと読む)
電気自動車用コントローラ装置
【課題】 コントローラに冗長性を持たせ、コントローラの故障など異常発生時にも、モータの制御が適切に行えて、安全性を高めることのできる電気自動車用コントローラ装置を提供する。
【解決手段】 モータBの駆動電流を出力するパワー回路部55、および上位の制御手段から与えられるモータ駆動指令aに応答してパワー回路部55の制御を行う弱電回路の制御回路部54を有するコントローラ53を複数備える。使用中のコントローラ53の異常を判定して切替信号cを生成する異常判定手段56を設ける。その切替信号cに応答して、モータBに対して機能する状態にあるコントローラ53を切り替える切替手段57,58を設ける。コントローラ53は、一つとし、制御回路部54またはパワー回路部55を複数設けて切り替えるようにしても良い。
(もっと読む)
駆動制御装置
【課題】アクチュエータで駆動する可動部が非線形系を持つ装置に対してセミクローズドループ制御とフルクローズドループ制御を滑らかに切換えて機械端の位置を高精度に制御する駆動制御装置を得る。
【解決手段】サーボアンプ(駆動制御装置)3は、モータ4の回転位置を検出するモータ端センサ2を含み、モータ4をセミクローズドループ制御するセミクローズドループ制御手段と、非線形の経路を移動する移動体9の位置を検出する機械端センサ8を含み、移動体9の位置に基づいてモータ4をフルクローズドループ制御するフルクローズドループ制御手段と、セミクローズド速度指令とフルクローズド速度指令のいずれかに切り換える切換スイッチ30と、切換スイッチ30の後段に設けられ速度指令を所定の大きさ以下に制限して制御切り換え時の速度指令の変動を吸収する速度リミッタ31とを備えている。
(もっと読む)
モータ駆動装置
【課題】速度制御から位置制御への切替をシームレスに行い、機械伝達系に衝撃を与えないモータ駆動装置を提供。
【解決手段】位置指令生成手段と位置指令フィルタ手段と速度フィードフォワード手段と位置制御手段と速度制御手段と速度制御時指令位置算出手段と位置/速度制御切替手段と指令位置切替手段とを備え、前記速度制御時指令位置算出手段においてモータ駆動装置から前記上位コントローラへの伝送遅れ時間の間のモータ移動量と、前記上位コントローラからモータ駆動装置への伝送遅れ時間の間のモータ移動量とを現在位置に加算して前期速度制御時指令位置とし、速度制御から位置制御への切替時において前回の前記速度制御時速度指令から算出される位置偏差量を位置偏差の初期値とするとともに、前記位置指令生成手段において前記位置偏差量を現在位置に加算したものを位置制御時指令位置の初期値として設定した後、前記目標位置指令による位置制御を行う。
(もっと読む)
ロータリーポンプのためのテスト制御器
ポンプ(10)のロータリーポンプ(12)を動作するためのテスト制御器(28)および方法を提供する。前記テスト制御器(28)は、前記ポンプ(10)に電気的に接続されるが、前記ポンプと着脱可能であり、かつ所定のテスト速度および/または所定のテスト時間で前記ポンプモータ(12)を回転させるために前記ポンプモータ(12)に少なくとも1の信号を印加するように構成されたテスト速度回路を具備する。アクチュエータ(32)は、所定のテスト速度および/または所定のテスト時間で前記ポンプモータ(12)を動作する前記テスト速度回路を選択的に作動する。前記方法は、前記ポンプ(10)に前記テスト制御器(28)を電気的に接続するステップと、前記アクチュエータ(32)の選択的な作動に応答して、所定のテスト速度および/または所定のテスト時間で前記ポンプモータ(12)を動作するために前記ポンプモータ(12)に少なくとも1の信号を印加するための前記テスト速度回路を選択的に作動するステップとを有する。前記方法は、前記ポンプ(10)から前記テスト制御器(28)を取り外すステップをさらに有する。  (もっと読む)
(もっと読む)
画像形成装置、サーボ制御装置、プログラム
【課題】キャリッジを駆動するときに目標停止位置に求められる最も高い停止位置精度が得られるサーボ制御終了タイミングでサーボ制御を終了しているために停止までの時間がかかる。
【解決手段】キャリッジ3を駆動するとき、当該駆動の目標停止位置に求められる停止位置精度を判別し、停止位置精度が高いときには、サーボ制御を終了タイミング1で終了し、停止位置精度が中のときには、サーボ制御を終了タイミング2で終了し、停止位置精度が低いときには、サーボ制御を終了タイミング3で終了する。
(もっと読む)
1 - 20 / 91
[ Back to top ]