
Fターム[5H501LL60]の内容
Fターム[5H501LL60]に分類される特許
1 - 20 / 112
冷却ファン、制御方法及び電子機器
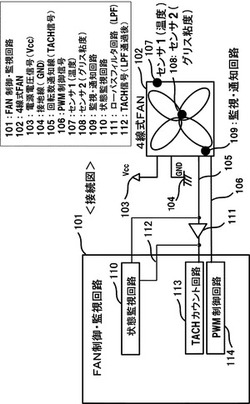
【課題】 冷却ファンなどの寿命部品における保全情報を利用する技術を提供する。
【解決手段】 寿命を予測するために必要な寿命情報を収集するセンサと、この前記寿命情報を他の情報のための信号線に重畳して送出する監視・通知手段とを備える冷却ファンと、前記信号線から前記寿命情報の成分を除くフィルタと、前記寿命情報に基づいて、冷却ファンの寿命を予測する状態監視手段とを備える電子機器。また、寿命を予測するために必要な寿命情報を収集するセンサと、前記寿命情報を他の情報のための信号線に重畳して送出する監視・通知手段とを備える冷却ファン。
(もっと読む)
駆動制御装置と画像形成装置

【課題】 動作部を安定して動作させる場合に不必要に低速で動作してしまうことのないようにする。
【解決手段】 CPU61は、インク関連動作制御部73を制御してインク関連動作部58を駆動させ、NVRAM64の動作実施回数を加算し、センサ57からの信号に基いて正常動作終了を検出した場合、NVRAM64の正常動作終了回数を加算し、NVRAM64の動作実施回数が判定基準回数以上の場合、(動作OK回数/動作実施回数)の値を算出し、その値がNVRAM64の正常判定閾値以上の場合、加速度に調整加速度を加算して新たな加速度にする。また、(動作OK回数/動作実施回数)の値が異常判定閾値以下の場合、加速度から調整加速度を減算して新たな加速度にする。
(もっと読む)
共振抑制装置及び共振抑制方法
【課題】共振周波数の変化に関して注意を促す。
【解決手段】本発明のある態様は、共振抑制装置に関する。この装置は、制御系の共振を抑制するために当該制御系に設けられているノッチフィルタと、ノッチフィルタの中心周波数を制御系の共振周波数に一致させるようにノッチフィルタのフィルタ係数を更新するためのフィルタ係数調整部と、を備える。フィルタ係数の更新処理は、ノッチフィルタの既存の中心周波数を基準とする前記共振周波数の変動量が許容範囲にあるか否かを判定することと、変動量が許容範囲外にあると判定される場合には警告を出力することと、を含む。
(もっと読む)
モータ駆動装置
【課題】設定内容とともに設定に必要となる関連情報を同時表示する設定表示装置を用いることで簡便かつ迅速な設定を可能とするモータ駆動装置を提供する。
【解決手段】設定表示装置20によりモータ駆動に関する設定が行われるモータ駆動装置1であって、この設定表示装置20は、ある設定項目の設定内容を変更する際に、設定項目の設定内容を表示し、さらに設定項目に関連する少なくとも1以上の関連項目の関連情報を表示するようにした。
(もっと読む)
可変速発電電動機の異常検出装置及び異常検出方法
【課題】 地絡発生前に警報を発して事故を未然に防止することができる可変速発電電動機の異常検出装置および異常検出方法を提供する。
【解決手段】 可変速発電電動機1の回転子2の回転位相および系統電圧位相に係る運転情報を取得する運転情報入力手段17と、可変速発電電動機1の運転中に発生する部分放電に起因した信号を含む1次信号を検出する部分放電センサ15aと、1次信号から部分放電の特徴を有する2次信号を検出する部分放電検出手段16と、2次信号と回転位相および系統電圧位相との同期性を比較することで、可変速発電電動機1の固定子コイル11の部分放電と回転子コイル6の部分放電とを識別する異常判定手段18とを備えた。
(もっと読む)
誤差周波数成分取得装置、回転角度取得装置、モータ制御装置および回転角度取得方法
【課題】レゾルバを用いてロータ回転角度を検出する装置において、調整者の負担を軽減しつつ、誤差の小さいロータ回転角度を得られるようにする。
【解決手段】角度測定値取得部210が、モータ軸の回転角度測定値を取得し、誤差算出部220が、複数の回転角度測定値の各々に含まれる誤差を算出する。そして、周波数成分取得部230が、複数の誤差から、誤差の周波数成分の位相および振幅を求める。これによって、誤差周波数成分取得装置121は、回転角度測定値に含まれる誤差の周波数成分の位相および振幅を自動的に算出することができ、当該位相および振幅を用いて回転角度測定値に対する補正を行うことができる。従って、調整者の負担を軽減しつつ、誤差の小さいロータ回転角度を得ることができる。
(もっと読む)
出力電流および出力電圧の測定に基づくトルクオブザーバ
【課題】電力変換器により給電される車両用3相駆動電動機のトルクを推定するための方法であって、3つの相線路が電力変換器から駆動電動機に導くことによって、車両用駆動電動機のトルクを確実に推定する。
【解決手段】3つの相線路6,7,8のうち少なくとも2つの相線路においてそれぞれ電流i1,i2,i3が測定され、3つの相線路6,7,8においてそれぞれ電圧u1,u2,u3が測定される。測定された電流又は測定された電圧から回転磁界周波数がが求められる。最終的に、測定された電流と、測定された電圧と、求められた回転磁界周波数とからトルクが推定される。
(もっと読む)
車両用駆動制御装置
【課題】駆動系の機械共振を適切に抑制する。
【解決手段】アクセル開度および速度に基づく要求駆動力に応じて走行用モータに対するトルク指令を出力するトルク指令生成部41と、トルク伝達系の固有振動周波数成分を減衰させるようにして、トルク指令に減衰フィルタ処理を行なって処理後のトルク指令を出力するトルク指令ノッチフィルタ42と、処理後のトルク指令に応じたトルクを発生させるように走行用モータを制御する動力指示部と、調整パラメータ演算部43とを備え、調整パラメータ演算部43は、走行用モータの回転数が所定回転数以下かつトルクが所定トルク以上である場合にトルク指令ノッチフィルタ42の減衰フィルタ処理の減衰特性を同定する。
(もっと読む)
電動パワーステアリング装置
【課題】電動モータの回転角速度に基づいて精確に電動モータを制御することのできる電動パワーステアリング装置を提供する。
【解決手段】この電動パワーステアリング装置は、モータ方程式に基づいて電動モータの回転角速度を算出する。そして、電動モータの運動状態に基づいてモータ方程式の近似式を算出し、この近似式に基づいてモータ方程式の逆起電圧定数を更新する。電動モータのトルクが付与される駆動体の動作に応じて信号を出力するセンサと、センサの出力信号に基づいて電動モータの回転角速度の演算値を算出する演算器とを備え、電動モータの電流の測定値が所定範囲内のとき、電動モータの電圧の測定値および前記回転角速度の演算値を記憶し、記憶した電圧の測定値の数または回転角速度の演算値の数が所定数以上のとき、近似式を算出する。
(もっと読む)
電動機の駆動装置
【課題】簡便な手法で機械軸系の捩じり振動を抑制することができる電動機の駆動装置を提供する。
【解決手段】機械負荷1を駆動する電動機2に対する速度基準と電動機2の実速度との偏差がなくなるように、電動機2のトルク基準を得て、電動機2に対するトルク信号を出力する制御部4、を備え、制御部4は、電動機2と機械負荷1とで構成される機械軸系で発生する捩じり振動に対するトルク信号の位相遅れが90度未満となるように設定されるようにした。
(もっと読む)
電動パワーステアリング装置
【課題】操舵系にアシスト力を付与するモータについて、実際のモータの抵抗と算出されるモータの抵抗とが乖離することを抑制することのできる電動パワーステアリング装置を提供する。
【解決手段】この電動パワーステアリング装置は、抵抗マップによりモータ抵抗Rmを算出する。モータ電流とモータ電圧とに基づいて推定誘起電圧を算出する。そして、推定誘起電圧が、電流の大きさに応じて設定される判定値以下の旨判定されるとき、モータ抵抗(推定モータ抵抗Rma)を算出し、この推定モータ抵抗Rmaに基づいて抵抗マップを更新する。
(もっと読む)
プラント制御装置及び厚板圧延システム
【課題】対象プラントの生産性を低下させることなく、モータの過熱保護による操業停止を確実に防止できるプラント制御装置を提供する。
【解決手段】モータ2を駆動するドライブ装置3と、モータ2の速度基準を生成し、その生成した速度基準をドライブ装置3に送信するコントローラ4とを有するプラント制御装置1において、RMS値計算手段6及び加減速レート調整手段9を備える。RMS値計算手段6は、モータ2のトルク電流の実効値を計算する。加減速レート調整手段9は、RMS値計算手段6によって計算された実効値が所定の規定値を超えている場合に、上記速度基準の加減速レートを調整し、モータ2の過熱保護による操業停止を防止する。
(もっと読む)
モータ制御装置およびモータ制御方法
【課題】動作中の進行方向に対する振動や偏差を抑えることにより、整定時間を短くすることが可能なモータ制御装置およびモータ制御方法を提供することにある。また、本発明により、理想的な軌跡でモータを動作させることができ、さらに、現在の位置を常にモニタリングすることができるため、複数の軸を同期させて動作させることが容易となる。
【解決手段】進行方向に対する振動に大きく影響する加加速度データからの指令波形を生成する手段と、偏差量に応じて、常に加加速度制限しながら今後の指令波形を再生成するリアルタイム実位置制御を行う手段とを備え、これにより高速でモータが動作する際の進行方向に対する振動や偏差を抑える。
(もっと読む)
回転制御装置及び回転制御方法
【課題】 コンパクトな構成で作業台の回転制御の精度の向上を図ることができる回転制御装置及び回転制御方法を提供する。
【解決手段】 回転体の回転に連動して回転するロータリーエンコーダの読取信号を処理して回転ムラ信号と回転ブレ量信号とを生成し、回転駆動部において回転ムラ信号に応じて回転体の回転速度サーボ制御をなすステップと、処理部において回転ブレ量信号に応じてワークに対する位置サーボ制御をなす。
(もっと読む)
モータ制御装置
【課題】制御遅延や電流応答遅延が発生しても遠心力低減効果が低下せず、適切な軸位置指令値を求めるのに大きな負担を必要としないモータ制御装置を提供する。
【解決手段】振れ回り抑制制御部30において、ローパスフィルタLPFによって軸変位検出値dqから軸の回転周波数に同期した直流成分の信号のみを抽出し、周期外乱オブザーバ50によって前記直流成分の信号に基づいて外乱を推定し、前記推定した外乱を抑制する軸変位指令値α*,β*を演算する。そして、前記振れ回り抑制制御部30で演算された軸変位指令値α*,β*を軸支持制御部20に入力する。
(もっと読む)
モータ制御装置
【課題】複数のユニットを有するモータ制御装置において、大きな負担を必要とせずに、モータ軸の振れ回りを抑制する。
【解決手段】軸変位検出値α1,β1,α2,β2から、軸変位検出値の並進運動成分αp,βpと回転運動成分αr,βrとを求め、前記並進運動成分αp,βpと回転運動成分αr,βrのそれぞれについて、ローパスフィルタLPF1によって、軸の回転周波数に同期した直流成分の信号のみを抽出し、周期外乱オブザーバ50a,50bによって前記直流成分の信号に基づいて外乱を推定し、前記推定した外乱を抑制する軸変位指令値の並進運動成分αp*,βp*と回転運動成分αr*,βr*を演算する。そして、軸支持制御部20において、軸変位指令値の並進運動成分αp*,βp*と回転運動成分αr*,βr*に基づいて、各モータの軸変位指令値を算出する。
(もっと読む)
摩擦補償方法、モータ制御方法、摩擦補償装置、及びモータ制御装置
【課題】運動する物体の温度及び速度又は角速度変動に対応した摩擦損失補償の手法及び構成を提供する。
【解決手段】摩擦補償装置20は、温度別に測定された制御対象の速度又は角速度と駆動電流値との関係式で導出された摩擦損失推定関数の関数保持部22を有する。摩擦損失推定関数は、速度又は角速度に依存する第1の項の係数として温度を変数とする第1の関数と、第2の項として温度を変数とする第2の関数を含む。摩擦補償装置20は、ある時刻の速度又は角速度と温度とを受け取る入力部と、入力された速度又は角速度と前記温度とに基づいて、第1の項を計算して粘性抵抗補償値を算出する粘性抵抗補償演算部24と、入力された速度又は角速度と前記温度とに基づいて、第2の項を計算してクーロン摩擦補償値を算出するクーロン摩擦補償演算部25と、粘性抵抗補償値24とクーロン摩擦補償値とを合算して摩擦損失補償電流を算出する加算器28を含む。
(もっと読む)
数値制御装置及び摩擦補償方法
【課題】ダブルナット予圧方式の送り駆動機構においても低速から高速の領域まで摩擦力又は摩擦トルクを高精度で推定して象限突起を補正できる数値制御装置及び摩擦補償方法を提供する。
【解決手段】本発明の数値制御装置はオーバーサイズボール予圧方式だけでなく、ダブルナット予圧方式の送り駆動機構においても低速から高速の領域まで摩擦力又は摩擦トルクを高精度で推定する。故に数値制御装置は象限突起を補正できる。象限突起は指令軌跡よりも移動軌跡が外側に出る現象である。ダブルナット予圧方式の送り駆動機構はボール螺子軸が反転して一山目の象限突起を生じる。ダブルナット予圧方式の送り駆動機構はテーブルが反転後所定量移動した時に更に二山目の象限突起を生じる。数値制御装置はダブルナット予圧方式の時に二段階で生じる摩擦力の上昇を二つの近似式を用いて高精度に推定できる。
(もっと読む)
自動製パン器
【課題】供給される交流電力の周波数の影響を簡易的に抑制する自動製パン器を提供する。
【解決手段】自動製パン器は、混練モータ50及び粉砕モータ60と、これらのモータを駆動するための交流電力を供給する電源部121aと、電源部121aが供給する交流電力の周波数を検知する電源周波数検知回路125と、上記のモータの駆動を制御する制御装置120と、を備える。制御装置120は、電源周波数検知手段125が検知する、電源部121aが供給する交流電力の周波数に応じて、上記のモータを駆動させる時間の長短を調整する。
(もっと読む)
モータ制御装置
【課題】マイクロコンピュータ(ECU)でモータを目標回転角度へ回転駆動する途中でマイクロコンピュータがリセットされた場合でも、通電相学習処理を再実行せずにモータを目標回転角度まで速やかに回転駆動できるようにする。
【解決手段】目標回転角度(目標レンジ)が変更される毎に目標回転角度をバックアップRAM(書き換え可能な不揮発性メモリ)に更新記憶しておき、モータを目標回転角度へ回転駆動する途中でレンジ切換ECUがリセットされて再起動したときに、エンコーダパルスのカウント値を使用せずにオープンループ制御によりモータの通電相を順次切り換えて、モータの出力軸の回転角度を検出する出力軸センサの検出値がバックアップRAMから読み出した目標回転角度に相当する値になるまでモータを回転駆動する。その後、通電相学習処理を再実行する。
(もっと読む)
1 - 20 / 112
[ Back to top ]