
Fターム[5H505EE07]の内容
交流電動機の制御一般 (51,584) | 電動機の制御方法 (6,264) | 負荷に応じた制御を行うもの (236)
Fターム[5H505EE07]に分類される特許
21 - 40 / 236
船舶用ハイブリッド推進システム操縦装置
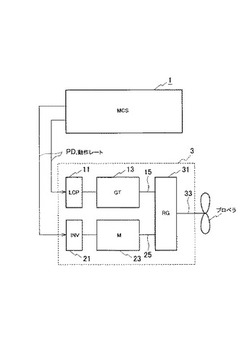
【課題】回転速度の時定数が異なる複数の動力源を同期させ、主軸の回転速度を制御することが可能な船舶用ハイブリッド推進システム操縦装置を提供する。
【解決手段】第1出力軸15を有する第1動力源13と、第2出力軸25を有し、第1動力源13よりも回転速度の時定数が小さい第2動力源23と第1出力軸15と第2出力軸25と連係し、第1動力源13と第2動力源23の各出力を主軸の出力に変換する減速装置とを有するハイブリッド推進システム3を操縦する船舶用ハイブリッド推進システム操縦装置1で、第1動力源13の回転速度の時定数に合わせて、第2動力源23の回転速度を変動させる。
(もっと読む)
モータ制御装置、モータ制御システム、モータ制御プログラム

【課題】運転モードに応じてモータの駆動を高効率で制御可能なモータ制御装置を提供する。
【解決手段】電流指令ベクトルの向きに応じた抑制電流成分によって抑制された後の誘起電圧を電圧検出部で検出される電源電圧Vbatよりも小さくする方向に抑制する第1電流指令ベクトルAvを決定する第1電流指令ベクトル決定部2aと、実測値に基づき予め記憶させている効率情報において回転数検出部で検出した回転数と外部から指示されたトルク指令Trefとに関連付けられた第2電流指令ベクトルAbaseを決定する第2電流指令ベクトル決定部2bとを備え、トルク出力優先モード時は第1電流指令ベクトルAvでモータの駆動を制御し、効率優先モード時は第2電流指令ベクトルAbaseでモータの駆動を制御するように構成した。
(もっと読む)
電動機駆動装置、および、これを用いた電動パワーステアリング装置
【課題】いずれかのインバータまたは巻線組が故障したとき、運転者に確実に故障の発生を気付かせる電動機駆動装置を提供する。
【解決手段】2つのインバータおよび2組の巻線組を備える2系統の電動機駆動装置においていずれか1系統のインバータまたは巻線組の故障を検出したとき(S20:YES)、故障系統の電源リレーを遮断し(S50)、正常系統の電流供給制限値の上限値である最大電流制限値Irを故障検出以前の最大電流制限値と同等の値に設定する(S60)。その後、IGスイッチがオンで(S70:YES)、操舵トルク検出値Tdが所定の閾値T0を超えたとき(S80A:YES)、電流指令値に所定の振幅および周波数を有する振動成分を加算することで、運転者のハンドル操作時にハンドルを回転方向に振動させる(S90)。これにより、運転者に確実に故障発生を気付かせることができる。
(もっと読む)
モータ制御装置
【課題】電源電圧が変動する場合であっても回転数により変化する誘起電圧が電源電圧を超えて制御破綻に至ることを的確に防止する。
【解決手段】誘起電圧を抑える方向に作用する抑制電流成分がベクトルの向きに応じて変化する電流指令ベクトルAを用いてモータの駆動を制御する。或る回転数N1の下に所望のトルクT1を発生させ得る複数の電流指令ベクトルA1〜A4に関する情報と各々の電流指令ベクトルA1〜A4の向きに応じた抑制電流成分によって抑制された後の誘起電圧V1〜V4とを回転数毎に関連付けた誘起電圧情報を実測値に基づき予め設定する。そして、誘起電圧情報において現回転数N1と外部から指示されたトルク指令T1とに関連づけられている複数の電流指令ベクトルA1〜A4のうち、誘起電圧を現電源電圧Vbatよりも小さくする方向に抑制する電流指令ベクトルA3、A4を求めて、求めた電流指令ベクトルによってモータを駆動制御する。
(もっと読む)
一軸破砕機の運転制御方法及び装置
【課題】一軸破砕機において、被破砕物の状況に応じてより大きな処理速度を得るようにロータ回転速度の制御を行う高効率運転の方法と装置を提供する。
【解決手段】本発明の一軸破砕機の運転制御方法は、多数の刃13を外周に取り付けて回転するロータ1に、例えば油圧シリンダ5で駆動されるプッシャ3で、被破砕物11を供給して破砕する一軸破砕機において、ロータ1の負荷についてあらかじめ決められた閾値で仕切られた領域におけるロータ1の速度の設定値をあらかじめ格納する工程と、ロータ1の負荷を推定する工程と、推定したロータ1の負荷が閾値で仕切られた領域のいずれに属するか判定する工程と、ロータ1の速度がロータの負荷に応じた前記設定値に一致するように同期電動機の速度を調整する工程とを含む。
(もっと読む)
船舶の電気推進システムの推進制御装置
【課題】電気推進システムの共通の給電路に接続された蓄電池が有効に働いているか否かに関わらず電気推進装置の回生動作により電路電圧が異常に上昇することを抑制して、給電路に接続された全ての機器または装置が過電圧に晒されることを防止する。
【解決手段】発電装置DGとこの発電装置により充電される蓄電池Bからなるハイブリッド電源10から、船舶の推進機PRを駆動する推進電動機Mとこの推進電動機へ供給される電力を変換制御して前記推進電動機を可変速制御する電力変換器INVとからなる電気推進装置20および船舶の各種の補助機器30に共通に給電するように構成し、前記電気推進装置を制御する推進制御装置50に、電気推進装置から前記ハイブリッド電源への回生電圧が所定の制限電圧を超えないように制御する電圧制限手段を設ける。
(もっと読む)
同期コンデンサの慣性を制御するためのシステム及び方法
【課題】発電システム内の電力擾乱事象に対応するよう同期コンデンサの慣性を制御するシステムを提供する。
【解決手段】システムは、モータ110と、双方向電源115と、少なくとも1つの制御装置120と、を含むことができる。モータ110は、電力擾乱事象中にコンデンサシャフト122の回転を変更して同期コンデンサ105の所望慣性を得るように構成することができる。双方向電源115をモータ110に結合することができる。少なくとも1つの制御装置120は、電力擾乱事象を識別し、所望の慣性を得るためにモータ110に供給し又はモータ110から受け取る電力量を特定して、特定された電力量に基づいて、電源115からモータ110へ、又はモータ110から電源115への電力供給を制御するよう構成することができる。
(もっと読む)
電力変換装置
【課題】負荷変動があっても直流電圧を維持し、且つ速度応答が遅くならないような電力変換装置を提供する。
【解決手段】出力側に平滑コンデンサを有するコンバータ1と、交流電動機4を駆動するインバータ2と、インバータ2を制御する制御手段3と、電流検出器6とで構成する。制御手段3は、交流電動機4の速度制御を行ってトルク軸電流基準を出力する速度制御手段31、32と、トルク軸電流基準の変化率にリミットをかけるトルク変化率リミット手段33と、トルク軸電流制御を行ってトルク軸電圧基準を出力する電流制御手段35と、3相電圧基準を生成する3相電圧基準生成手段37と、PWM手段38とを有し、トルク軸電流基準の変化率が、上記トルク変化率リミット手段33のリクット値以下の所定値を越えたとき、トルク変化率リミット手段33を所定時間だけ開放する。
(もっと読む)
モータ駆動装置
【課題】モータが高速に回転する場合にも、トルクリップルや異音の発生を十分に抑制することが可能なモータ駆動装置を提供する。
【解決手段】モータ駆動装置100は、インバータ1と、インバータ1を制御する制御部2とを備える。制御部2は、電流指令値を算出する電流指令値算出部21と、モータ150の回転角度θおよび角速度ωを算出する回転演算部22と、回転角度θに基づいて電流指令値を補正する電流指令値補正部24と、電流指令値補正部24により補正された電流指令値に基づいて、電圧指令値を算出する電圧指令値算出部25と、電流指令値算出部21により算出された電流指令値と、回転角度θおよび角速度ωとに基づいて、電圧指令値算出部25により算出された電圧指令値を補正する電圧指令値補正部26と、電圧指令値補正部26により補正された電圧指令値に基づいて、PWM信号を生成する駆動信号生成部27とを含む。
(もっと読む)
電動パワーステアリング装置
【課題】 システムを大型化することなく、ステアリング機構10に逆入力が働いた場合に操舵ハンドル11が回されることを抑制する。
【解決手段】 逆入力検出部200は、逆入力により操舵ハンドル11が回される逆入力状態を検出すると、逆入力判定フラグFを「0」から「1」に変更する。補償トルク出力制御部115は、逆入力状態が検出されたとき(F=1)、トータル補償トルクTb(=Tb1+Tb2)を出力しないようにして、目標アシストトルクT*にトータル補償トルクTbが含まれないようにする。従って、目標アシストトルクT*がトータル補償トルクTbの影響で小さくなることがない。
(もっと読む)
同期電動機の制御装置
【課題】予め設定されているパラメータを基に、周期性外乱に起因する同期電動機の速度リプルを抑制する補正値を作成し、振幅が一定でない速度リプルをも抑制可能とする。
【解決手段】周期性外乱補正部19の開閉器22をOFF状態にし、一定の速度指令値Nrefが入力されて同期電動機4が回転駆動される。このとき、周期性外乱補正部19からは加算器6に周期性外乱補正信号h(θ)が供給されず、周期性外乱Txstに起因する速度リプルが抑制されない状態で動作する。かかる状態でコントローラ調整用PC23が電流指令値Irefを取り込んでモニタし、位相調整量θofstと、次数Bと、モータ回転位置θを変数とする振幅関数f(θ)とを求め、これらパラメータを基に、該周期性外乱補正信号h(θ)として、h(θ)=f(θ)・sin(B・θ+θofst)を生成し、これを加算器6に供給する。
(もっと読む)
回転電気機械のトルクリプル抑制制御装置および制御方法
【課題】周期性外乱オブザーバによるトルクリプル抑制制御に、周期性外乱の実部、虚部成分の推定遅れを少なくしてトルクリプルを良好に抑制できる。
【解決手段】周期性外乱オブザーバ31は、トルク指令値からトルク検出値までのn次トルクリプル周波数成分別のシステム伝達関数を実部P^Anと虚部P^Bnの1次元複素ベクトルで同定した値と、余弦係数TAnと正弦係数TBnおよびシステム伝達関数の実部P^Anと虚部P^Bnから、周期性外乱を含む電流推定値の実部IAnおよび虚部IBnを求め、電流推定値の実部IAnおよび虚部IBnのそれぞれから脈動抽出フィルタGFを介した補償電流指令値IAn*、IBn*を差し引き、周期性外乱電流を打ち消すための周期性外乱電流実部dIAnおよび虚部dIBnの推定値を得る。
(もっと読む)
インバータ制御装置
【課題】高調波重畳による磁極位置検出時に一定の騒音と損失が発生する従来の制御とは異なり、モータの駆動状態に応じて、高調波重畳による騒音と損失を低減させる。
【解決手段】本発明に係るインバータ制御装置は、ハイブリッド電気自動車及び電気自動車に適用でき、モータの回転速度が所定速度より低速か否か判断する手段と、前記モータの回転速度が前記低速と判断された場合、前記モータへの印加電圧または供給電流に高調波成分を重畳して前記回転子の磁極位置を推定する推定手段とを具備し、この推定手段は、前記モータの駆動状態変化に応じて、磁極位置推定のための前記高調波成分の振幅を減少し、高調波重畳による騒音と損失を低減させる。
(もっと読む)
交流モータの制御装置
【課題】オフセット電流の発生を抑えつつ、より高回転まで矩形波制御が可能な交流モータの制御装置を提供する。
【解決手段】制御装置30は、センサ25の出力に基づいて定まる電気角の1周期内において、各相のスイッチング基準位相に対しての各相の矩形波電圧の電圧位相の変化量をスイッチングごとに等しく増加または減少させる。制御装置30は、電気角の2周期以上の所定周期ごとに矩形波電圧の電圧位相変化の合計量を算出する第1の制御部と、所定周期に一度の割合で合計量に関連する情報を第1の制御部から受取り、各相のスイッチング基準位相に対する位相差を更新する第2の制御部とを含む。第2の制御部は、各相のスイッチング基準位相に対する第n番目のスイッチングの位相差を、合計量を所定周期内のスイッチング回数で除算した単位増減量のn倍に設定する。
(もっと読む)
電気自動車
【課題】電動機の損失のうち鉄損の割合が最も大きい駆動領域において電動機の鉄損を低減する。
【解決手段】モータ22の損失のうち鉄損の割合が最も大きい駆動領域で当該モータ22をPWM電圧により駆動するようインバータ24を正弦波PWM制御または過変調PWM制御しているときには、インバータ24の出力電流の電流リプルを増加させる。モータ22の損失のうち鉄損の割合が最も大きい駆動領域は、モータ22の目標回転数が予め定められた回転数以上となり、かつ目標トルクが予め定められたトルク(例えば、モータ22の最大出力トルクの1割程度)以下となる領域として定められ、オートクルーズの実行が指示されていると共にモータ22をPWM電圧により駆動するようインバータ24をPWM制御するときにも、インバータ24の出力電流の電流リプルが増加される。
(もっと読む)
電動式建設機械
【課題】簡素な構成でオートアイドル制御を行うことができ、且つ制御調整の負担を軽減することができる電動式建設機械を提供する。
【解決手段】インバータ装置29は、通常モード中、回転数指示装置28で指示された目標回転数に対応する閾値を読込み、永久磁石同期モータ30の一次電流が閾値より小さくなる状態で所定時間が経過したか否かを判定し、これによって全ての油圧アクチュエータが動作していないような低負荷状態であるか否かを判断する。そして、永久磁石同期モータ30の一次電流が閾値未満となる状態で所定時間が経過したと判定された場合は、通常モードからアイドルモードに切替えて、ローアイドル回転数となるように、永久磁石同期モータ30の印加電圧を制御する。
(もっと読む)
電動機駆動装置及び電動機駆動装置の制御方法ならびに電動装置
【課題】部品点数を減らしつつ、エネルギー変換効率を向上することが可能な電動機駆動装置を提供する。
【解決手段】電動機駆動装置(1、21〜23)は、交流電動機10に印加される電圧を調節することにより交流電動機10を駆動するインバータ3と、交流電動機10の複数のコイルが結線された中性点と、インバータ3の正極側母線または負極側母線との間に直流電圧を印加する直流電源2から供給され、かつインバータ3を経由する電流により充電されるコンデンサ4と、交流電動機10が指定された回転数で回転するように、インバータ3を制御する制御回路7とを有する。そして制御回路7は、交流電動機10に生じる誘起電圧と、直流電源2と、コンデンサ4の電圧との条件により弱め界磁制御と昇圧制御を使い分けてインバータ3を制御する。
(もっと読む)
駆動輪に連結された駆動軸に動力を入出力可能な電動機と、電動機を駆動するインバータとを備えた車両
【課題】スリップ発生時にインバータの一部のスイッチング素子がオフ状態で作動しなくなるオフ異常をより適正に判定する。
【解決手段】駆動輪の空転によるスリップが発生しているときには、インバータに印加される昇圧後電圧VHが急変したと判定され(ステップS180)、昇圧後電圧VHの変動周期がモータMG2等に印加される相電流の一周期に概ね一致すると判定され(ステップS190,S200)、且つ過変調制御モードまたは矩形波制御モードから正弦波制御モードへの切り替えが所定時間tref内に所定回数Cref以上行なわれたと判定されたときに(ステップS160)、インバータのオフ異常が生じていると判定される(ステップS170)。
(もっと読む)
周期的な負荷にかけられる電動モータ用の予測制御システムおよび電動モータ用の予測制御方法
本発明は、周期的な負荷にかけられる電動モータ用の予測システムおよび制御方法に関し、そのシステムは、電動モータ10と、少なくとも1つの電子制御ユニット20と、少なくとも1つの電源ユニット30と、少なくとも1つの電気的な位置観測装置とを有し、電源ユニット30によって電動モータ10が電気的に駆動され、電子制御ユニット20によって電源ユニット30が電気的に命令され、両方とも電子制御ユニット20によって実現される電動モータの平均速度制御装置と位置観測装置とを備え、電動モータ10の平均速度をモニタするように速度制御装置が構成され、電動モータ10の各位置での瞬間速度Viをモニタかつ記憶し各位置で電動モータ10の瞬間制御速度Vcを推定するように位置観測装置が構成され、モニタした平均速度に基づき平均電圧Vmを計算するように電子制御ユニット20が構成され、制御電圧値V制御によって電動モータ10を電気的に駆動するように電源ユニット30が構成され、瞬間制御速度Vcと平均速度の間で除算をした結果を平均電圧Vmに掛けることによってこの制御電圧値V制御を計算する。 (もっと読む)
最適化された運動プロフィールを用いた省エネルギー
エレベータシステムは、かごと、かごを昇降させる巻上モータと、かごの移動を制限するブレーキと、走行の目的階を選択する入力装置と、制御装置と、を備える。制御装置は、入力装置から命令を受け取り、巻上モータおよびブレーキの作動を制御する。制御装置は、走行について一組の組み合わされたエネルギー損を低減するように、かごの負荷、走行方向、および走行距離に従って変化する、走行についての速度プロフィールを制御装置が選択する、損失低減モードを有する。  (もっと読む)
(もっと読む)
21 - 40 / 236
[ Back to top ]