
Fターム[5H505JJ05]の内容
交流電動機の制御一般 (51,584) | 演算部の構成手段 (5,723) | すべり演算回路 (40)
Fターム[5H505JJ05]に分類される特許
1 - 20 / 40
高圧インバータの瞬時停電補償方法及びこれを利用した高圧インバータシステム
【課題】本発明は、高圧インバータで瞬時停電が生じる場合、負荷が保存している機械的運動エネルギーを電気的エネルギーに変換して停電区間に対応することによって、高圧インバータが停止せずに運転し続けるようにする瞬時停電補償方法及びこれを利用した高圧インバータシステムを提供することを目的とする。
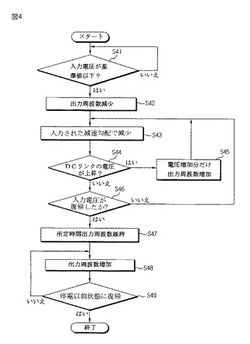
【解決手段】本発明では、直列連結されて電動機に供給する一つの相電圧を構成する複数の電力セルを備える高圧インバータにおいて、複数の電力セルの入力電圧が基準値以下の場合、該当時点で前記複数の電力セルの出力周波数を所定値だけ減少させ、所定の減速勾配で出力周波数を減少させた後、入力電圧が復帰する場合、復帰時出力周波数を所定時間だけ維持する。
(もっと読む)
モータ制御装置

【課題】トルク応答性の遅れを抑制するモータ制御装置を提供する。
【解決手段】モータ10の回転速度を検出するモータ回転速度検出手段と、外部から入力されるトルク指令値及び前記回転速度に基づき、所定の上限電流値の範囲内である、第1の励磁電流指令値及びトルク電流指令値をそれぞれ演算する電流指令値演算手段と、前記第1の励磁電流指令値の位相を進めて第2の励磁電流指令値を演算することで、前記モータのロータ磁束の遅れを補償する補償手段と、前記上限電流値及び前記トルク電流指令値に基づいて、前記励磁電流指令値の上限値である上限励磁電流指令値を演算する上限励磁電流指令値演算手段と、前記第2の励磁電流指令値を、前記上限励磁電流指令値以下に制限することで、第3の励磁電流指令値を演算する励磁電流指令値制限手段と、前記第3の励磁電流指令値及び前記トルク電流指令値に基づいて前記モータを制御するモータ制御手段と、を備える。
(もっと読む)
誘導電動機の速度制御装置
【課題】本発明は、連続工程ラインにおいて張力及び位置センサーを用いないオープン−ループ速度制御を行って、ベクトルインバータの機能を向上するための誘導電動機の速度制御装置を提供する。
【解決手段】本発明の装置は、張力指令、摩擦損補償を利用して、速度制御部の出力に対するトルク制限を計算し、これを利用して誘導電動機の速度を制限して、連続工程ラインで張力センサー及び位置センサーを用いることなく、ベクトル制御方式のインバータの性能を向上することができる。
(もっと読む)
電動機駆動システム
【課題】ダイオードコンバータを採用した際に、圧延機の噛み込み時に電動機に急激な負荷が加わる際の電動機一次電圧の飽和を避けることができるとともに、電圧飽和の影響によるインバータの制御不安定又はトリップを防ぐ。
【解決手段】電動機11と、インバータの直流電源であるダイオードコンバータ22と、インバータを用いて電動機11を可変速制御し、且つ界磁弱め制御を行う電動機制御装置23と、電動機制御装置23により出力される一次電圧を検出する一次電圧検出部13と、要求されるインバータの変調率の変動が予測される場合に、変動のタイミングと変動量とを検出する変調率変動検出部と、変調率変動検出部により検出された変調率の変動量に基づいて一次電圧の変動量を算出する補正電圧部25とを備え、電動機制御装置23は、変動のタイミングに合わせ、一次電圧とその変動量とに基づいて界磁弱め制御を行う際のd軸界磁電流抑制分を算出する。
(もっと読む)
電力変換装置、電動機駆動システム
【課題】回転子の回転状態を検出するためのセンサを用いずに電動機を制御する電動機の制御方法において、電動機が高トルク運転時でも電動機の運転を持続しつつ、回転子の回転状態を精度よく検出すると共に騒音の発生を抑制する。
【解決手段】電力変換装置50aにおいて、電圧出力手段3は、ベクトル演算手段4からの基本電圧指令値Vdc*、Vqc*に対して高周波の交番電圧を重畳し、三相交流電圧指令値Vu*、Vv*、Vw*を電力変換手段11へ出力する。電流成分分離手段5は、三相電流信号Iuc、Ivc、Iwcから交番電圧に応じた高周波電流成分を抽出し、その高周波電流成分の大きさを表す高周波電流ノルムIhを求める。重畳電圧振幅調整手段9は、電流成分分離手段5からの高周波電流ノルムIhに基づいて、交番電圧の振幅を調整するための重畳電圧振幅指令値Vh*を電圧出力手段3へ出力する。
(もっと読む)
電動機駆動装置
【課題】1台の多巻線電動機をベクトル制御により可変速駆動するのに好適なそれぞれの電動機駆動装置を提供する。
【解決手段】複数の一次巻線にて形成される多巻線電動機2に対して、第1電動機駆動装置、第2電動機駆動装置・・第N電動機駆動装置などからなり、この第1電動機駆動装置はインバータ回路と、電流検出器と、ベクトル制御回路とから構成し、同様に、第2電動機駆動装置はインバータ回路と、電流検出器と、ベクトル制御回路23aとから構成し、このベクトル制御回路23aには従来のベクトル制御回路と同一の構成要素の他に、加算演算器77、3相/2相変換器86、誘起電圧磁束演算器での演算機能の1部を省略した磁束演算器87a、磁束調節器89それぞれが追加機能として装備することにより、多巻線電動機2が発生する二次磁束をより安定させ、多巻線電動機2の回転数が変動したり、一次電流が脈動する現象を抑制することが出来る。
(もっと読む)
電動機の速度制御装置及び速度制御方法
【課題】目標値応答と外乱応答を個別に最適化可能な電動機の速度制御装置を提供する。
【解決手段】速度制御手段を、速度指令と速度帰還の偏差に積分ゲインGIを乗算して積分する積分増幅器221と、速度指令を共通の入力とし、比例ゲインGF1を有する不完全微分器の出力及び比例ゲインGF2を有する1次遅れ演算器の出力を加算して出力するフィードフォワード補償器224と、積分増幅器221の出力から速度帰還を減算すると共に、フィードフォワード補償器224の出力を加算する加減算器222と、この出力にゲイン調整パラメータGPを乗算してトルク指令を得る比例増幅器223とで構成する。速度指令応答時定数をτr、トルク外乱応答時定数をτd、電動機を含む負荷慣性モーメントをJとしたとき、G1=1/τd、GP=σr×J、GF1=1/(σr×τr)、GF2=1−τr/τdを満たすようにする。
(もっと読む)
すべり周波数補正機能を有するセンサレス誘導モータの制御装置
【課題】センサレス誘導モータの制御装置におけるすべり周波数の推定値を適切に修正してモータの出力を改善する。
【解決手段】理想電圧指令演算部30において速度指令ωrcmdの値とQ相電流指令IQcmdの値から理想電圧指令ノルムVrefを算出し、電圧指令ノルム計算部32において計算される実電圧指令ノルムVcmdの値が理想電圧指令ノルムVrefよりも小さければ、すべり推定部20において推定される推定値をより小さい値に補正する。
(もっと読む)
電力変換装置
【課題】負荷変動があっても直流電圧を維持し、且つ速度応答が遅くならないような電力変換装置を提供する。
【解決手段】出力側に平滑コンデンサを有するコンバータ1と、交流電動機4を駆動するインバータ2と、インバータ2を制御する制御手段3と、電流検出器6とで構成する。制御手段3は、交流電動機4の速度制御を行ってトルク軸電流基準を出力する速度制御手段31、32と、トルク軸電流基準の変化率にリミットをかけるトルク変化率リミット手段33と、トルク軸電流制御を行ってトルク軸電圧基準を出力する電流制御手段35と、3相電圧基準を生成する3相電圧基準生成手段37と、PWM手段38とを有し、トルク軸電流基準の変化率が、上記トルク変化率リミット手段33のリクット値以下の所定値を越えたとき、トルク変化率リミット手段33を所定時間だけ開放する。
(もっと読む)
交流電動機の駆動装置及び電動機車両
【課題】交流電動機の極低速域のセンサレス駆動を、高調波電圧を意図的に印加することなく、理想的なPWM波形にて、ベクトル制御を行う交流電動機の駆動装置を提供する。
【解決手段】交流電動機の電流検出と、電流変化率の検出を行い、この電流変化を与えているインバータの出力電圧を考慮して、交流電動機内部の磁束位置の推定演算を行う。電流変化率は、インバータのパルス波形によって発生するため、意図的な高調波の印加を行うことなく、交流電動機の磁束位置を推定演算できる。
(もっと読む)
回転機制御装置
【課題】装置の可能な最大の能力を有効に利用して、起動時のトルクの立ち上がりを極力迅速化することができ、巻上機や昇降機などの用途でも、ずり落ちを防止するための機械ブレーキの使用時間を除去あるいは短縮することができる回転機制御装置を得ることを目的とする。
【解決手段】誘導機1の起動直後から所定の設定条件に至るまでの期間、励磁電流演算器5およびトルク電流演算器6からの励磁電流指令id1*およびトルク電流指令iq1*を、許容される最大電流をImaxとしたとき、下式を満足するように修正処理を施して制御手段4に出力する電流指令切替手段7を備えた。
id*=iq*=idq0=Imax/(√2)
(もっと読む)
動力発生装置
【課題】トルク変化時に、ピーク電流を低減しながら磁束を増加させ、高効率の運転を実現すること。
【解決手段】誘導電動機30と、誘導電動機30に電流を供給するインバータ回路31を有し、インバータ回路31はトルクの絶対値を増加させる前に、誘導電動機30のスベリ周波数をほぼ零として入力電流を増加させる期間を有する動力発生装置とすることにより、必要となる磁束の増加を優先的かつ自動的に得ることができ、簡単な構成でありながら、過大電流も防ぎ、効率も高くできる。
(もっと読む)
誘導モータの制御装置
【課題】 誘導モータの励磁電流とトルク電流を円滑に変更し、任意の出力状態での制御方式の切替えを可能にする誘導モータの制御装置を提供する。
【解決手段】 トルク指令値と誘導モータIMの回転速度とに応じて電流指令値を算出し、算出された電流指令値に対応した三相交流電流で誘導モータを駆動する誘導モータ制御装置であり、与えられたトルク指令値において誘導モータの目標磁束を一定とする電流を演算するベクトル制御電流成分指令演算部11−1と、与えられたトルク指令値において誘導モータの損失を最小とする電流を演算する最大効率制御電流成分指令演算部11−2と、電流指令値の切替え時の電流を演算する制御方式切り替え時電流成分指令演算部11−3と、前記誘導モータに流れる電流を前記電流指令値に追従させるモータ駆動部(12、13、14)と、を備え、前記誘導モータの出力トルクを前記トルク指令値に対応した値とするように制御する。
(もっと読む)
トルク制御装置
【課題】 ウェブ巻取機に用いる三相交流誘導電動機のトルクを簡単な回路で制御する。
【解決手段】 直流電源6からインバータ3で三相交流電流を生成して、三相交流誘導電動機1を駆動する。三相交流誘導電動機1の回転数を、速度検出器4で計測して回転子角速度ωmを得る。最適値に設定されたすべり周波数に対応するすべり角速度に、速度検出器4で計測した回転子角速度を加算して、駆動角速度を求める。トルク指令値に対応するトルク成分電流の二乗から固定子電流の二乗の9/8倍を引いた値を0にするような固定子電圧指令値を、PID制御手段で発生する。固定子電圧指令値と界磁角速度指令値に従って三相正弦波を発生する。PWM回路で、三相正弦波をPWM変調した信号でインバータ3を制御する。すべり周波数を一定に保ちながら、電流検出器5と速度検出器4のみで目的のトルクに維持できる。
(もっと読む)
誘導電動機の制御装置
【課題】励磁電流のみならずトルク電流による励磁インダクタンスの磁気飽和の影響も補償して、高精度なトルク制御を可能にする。
【解決手段】誘導電動機200の電流を励磁電流及びトルク電流に分解する座標変換手段5と、磁束指令値から励磁電流指令値を演算する手段9と、トルク指令値からトルク電流指令値を演算する手段7と、励磁電流検出値を指令値に一致させるd軸電圧指令値を出力する励磁電流調整手段10と、トルク電流検出値を指令値に一致させるq軸電圧指令値を出力するトルク電流調整手段8と、を備え、前記各電圧指令値を用いて電力変換器12を制御する制御装置において、トルク電流指令値またはトルク指令値の大きさに応じた補正値を出力する補正値演算手段72と、前記補正値をトルク電流指令値に加算する加算手段73と、を有し、加算手段73による補正後のトルク電流指令値をトルク電流調整手段8に入力する。
(もっと読む)
電動機制御装置
【課題】過電流の発生を防止しながら確実に起動する。
【解決手段】一次抵抗調整器18は、指令Q軸電流isqrefまたは検出Q軸電流isqが定格Q軸電流iqn以上であって、且つ、演算された一次周波数ωstatが、理想ベクトル制御状態で指令回転速度ωrefがゼロの場合に指令Q軸電流isqrefに等しいQ軸電流が流れるときの一次周波数よりも低く設定された基準周波数以下であると判定したときに、一次抵抗設定値Rsadjを低減する。検出D軸電流isdがマイナス値になったとき、または検出D軸電流isdが基準D軸電流以上となったときにも一次抵抗設定値Rsadjを低減する。過大判定条件の成立中に低減した一次抵抗設定値Rsadjを、過大判定条件の不成立中に再度大きくすることで、低減し過ぎることを防止する。
(もっと読む)
誘導電動機の制御装置
【課題】誘導電動機が予め回転している場合においても、安定に速度センサレスベクトル制御による起動を可能にした誘導電動機の制御装置を提供する。
【解決手段】インバータ101から誘導電動機102への印加電流及び印加電圧を用いて誘導電動機の磁束及び速度を推定演算し、この推定速度を用いて誘導電動機102を可変速制御する制御装置において、この制御装置は、インバータ101の出力周波数指令の絶対値を下限値に制限する下限値制限手段と前記下限値を調整する下限値調整手段とを備えた絶対値下限リミット手段108を有し、前記下限値調整手段は、出力周波数指令が前記下限値と等しい状態が一定時間継続した場合に前記下限値を調整する。
(もっと読む)
電動機駆動装置
【課題】1台の多巻線電動機をベクトル制御により可変速駆動する電動機駆動装置を提供する。
【解決手段】一次巻線が複数本の素線を同一経路に巻回して形成される多巻線電動機2の第1電動機駆動装置10、第2電動機駆動装置20・・第N電動機駆動装置30、指令手段19,29,39などからなり、この第1電動機駆動装置10はインバータ回路11と、電流検出器12と、ベクトル制御回路A13と、このベクトル制御に必要な制御データを格納するモータ制御用データA14,モータ制御用データB,C15と、その格納値から多巻線電動機2の動作状態に対応した値を導出するデータ演算回路16とから構成し、減機運転するときには、このときの多巻線電動機2の稼動巻線数のみを指令手段19から設定するだけで、この減機運転でのベクトル制御に必要な制御用データとしての多巻線電動機2の電動機定数などを、ベクトル制御回路A15内で速やかに設定し直す。
(もっと読む)
電動機駆動装置
【課題】 1台の多巻線電動機をベクトル制御により可変速駆動するのに好適なそれぞれの電動機駆動装置を提供する。
【解決手段】 複数の一次巻線にて形成される多巻線電動機2に対して、第1電動機駆動装置10、第2電動機駆動装置20・・第N電動機駆動装置30などからなり、この第1電動機駆動装置10はインバータ回路11と、電流検出器12と、ベクトル制御回路13とから構成し、このベクトル制御回路13を形成する速度制御監視回路91および切替操作回路92により、多巻線電動機2の速度制御を行っていた第1電動機駆動装置10の速度制御系に故障が発生したときに、残りの第2電動機駆動装置20・・第N電動機駆動装置30から前記速度制御を行う電動機駆動装置を選定して、速やかに多巻線電動機2の回転動作を回復させるようにする。
(もっと読む)
速度センサレスベクトル制御装置
【課題】モータパラメータの設定誤差に対しロバストな制御を実現する。
【解決手段】速度演算部11は、指令Q軸電流isqrefとQ軸電流isqとを一致させるように回転子速度ωrを推定し、すべり周波数演算部12は、Q軸電流isqを用いてすべり周波数ωslipを推定する。電圧指令演算部15は、定常状態の電圧方程式に基づいて指令D軸電圧vsdrefと指令Q軸電圧vsqrefを演算し、電圧指令補正部34は、指令一次電流ベクトルの方向または検出一次電流ベクトルの方向にD軸電流誤差に応じた比例補償を行うことで指令D軸電圧vsdrefと指令Q軸電圧vsqrefを補正する。位相誤差演算部35は、二次磁束軸とD軸との誤差量を推定演算し、軸ずれを位相の次元で補正する。
(もっと読む)
1 - 20 / 40
[ Back to top ]