
Fターム[5H540DD07]の内容
Fターム[5H540DD07]の下位に属するFターム
パターンを用いるもの (4)
寸動によるもの (1)
Fターム[5H540DD07]に分類される特許
1 - 20 / 26
リニアコンベア
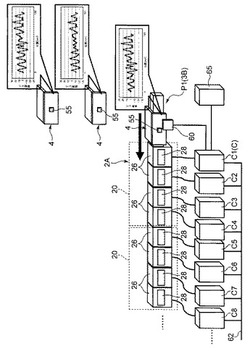
【課題】位置補正用データの管理負担を伴うことなく搬送台車を高い精度で位置決めする。
【解決手段】リニアコンベアは、複数の電磁石ユニット26を含み、電磁石ユニット26毎に個別に通電制御が可能なリニアモータ固定子7と、永久磁石44からなるリニアモータ可動子8及び位置補正用データが記憶されたRFタグ55をそれぞれ備える複数のスライダ4と、各電磁石ユニット26の通電制御を個別に行う複数のモータコントローラCと、RFタグ55の情報を読み取るリーダライタ60と、を備える。各モータコントローラCはそれぞれ、リーダライタ60が読み取った各スライダ4の位置補正用データを記憶しておき、スライダ4を目標位置で停止させる際には、対象となるスライダ4の位置補正用データを用いて目標停止位置を補正し、この補正後の目標停止位置に基づいて電磁石ユニット26への通電制御を行う。
(もっと読む)
リニア搬送装置

【解決手段】 リニア搬送装置3は、複数の永久磁石13aからなる可動子13と、複数のコイル14aからなる複数の固定子14と、上記可動子13の永久磁石13aの磁界を検出するホール素子17とを備えている。
さらに、上記可動子13における先頭の永久磁石13aよりも搬送方向後方に検出片18を設けるとともに、当該検出片18を検出するセンサ19を上記可動子13の搬送経路上に設ける。
上記ホール素子17が検出した可動子13の先頭の永久磁石13aの磁界から可動子13の位置を認識すると、当該認識した可動子13の位置を仮位置とし、さらに上記センサ19が上記検出片18を検出すると、当該センサ19が検出片18を検出した位置を可動子13の実位置として上記仮位置から置き換え、当該可動子13の実位置を基準に可動子13の位置を認識する。
【効果】 可動子の位置を高精度に認識することができる。
(もっと読む)
制御装置、及び制御方法
【課題】位置フィードバック機構を用いたモータの制御において、整定時間を短縮することができる制御装置を提供する。
【解決手段】制御装置は、外部より一定間隔ごとに入力される位置指令値から位置指令値の変化量を算出し、算出した変化量に基づいて、モータにおいて生じる位置指令値に対する動作の遅れを補正する補正値を算出する位置指令補正部と、補正値により位置指令値を補正した補正位置指令値に応じた電力をモータに供給する駆動部とを具備する。
(もっと読む)
駆動制御回路およびフォーカス制御回路
【課題】PWM駆動電流に起因するノイズを低減する。
【解決手段】イコライザ30は、対象物の状態に係る目標値とその実測値との差分をもとに、対象物の状態を目標値に合わせるための制御信号を生成する。PWM変調部40は、イコライザ30により生成される制御信号に応じたPWM信号を生成する。Hブリッジ駆動部50は、PWM変調部40により生成されたPWM信号に応じて、対象物の状態を変化させる駆動素子12を駆動するための駆動電流を生成する。スルーレート制御部60は、制御信号に応じて、Hブリッジ駆動部50の電流駆動能力を変化させる。
(もっと読む)
リニア振動モータの駆動制御回路
【課題】リニア振動モータの駆動終了時において、最適な停止制御を実現する。
【解決手段】リニア振動モータ200の駆動制御回路100において、駆動信号生成部10は、リニア振動モータ200の駆動終了後、その駆動時に生成していた駆動信号の位相に対して逆位相の駆動信号であって、駆動部20がハイインピーダンス状態に制御されるハイインピーダンス期間を含む駆動信号を生成する。誘起電圧検出部30は、ハイインピーダンス期間にコイルL1に発生する誘起電圧を検出する。コンパレータ41は、所定の不感帯では出力レベルが変化しないヒステリシスコンパレータとしての機能を備え、ハイインピーダンス期間に、ハイレベル信号またはローレベル信号を出力する。駆動信号生成部10は、コンパレータ41から、連続する前記ハイインピーダンス期間に、連続して同相信号が出力されたとき、リニア振動モータ200が停止したと判定する。
(もっと読む)
リニアモータ位置検出システム
【課題】測長距離の制限を受けることがないと共にリニアモータの能力を十分に発揮させて制御時間の短縮を図ることができるリニアモータ位置検出システムを提供する。
【解決手段】リニアモータ5により移動されるテーブル4の直線運動をラック12とピニオンギア13により回転運動に変換するようにしたので、直線運動系での検出は有限目盛りであるのに対して回転運動系での検出は無限目盛りとなり、理論的には直線運動系の測長距離が無限であっても、直線運動系の測長距離を回転運動系の測長距離に容易に変換することができ、測長距離の変更に容易に対応することができる。
(もっと読む)
リニアモータシステム、リニアモータアクチュエータ及び制御装置
【課題】リニアスケールのコストを減らしつつ、高速な移動を可能とし、且つ、停止精度を高くする。
【解決手段】位置センサはリニアスケールの目盛りを読み取り第1の位置情報を生成し、磁気センサは可動子又は固定子の一方から発生する磁界を検出し、90°の位相差を持つ正弦波状信号及び余弦波状信号を出力し、位置検出手段は正弦波状信号及び余弦波状信号に基づいて第2の位置情報を生成し、リニアスケール又は位置センサの一方は可動子とともに移動し、リニアスケール又は位置センサの他方は可動子が移動可能な範囲のうちの一部の範囲のみで位置センサがリニアスケールの目盛りを読み取ることができるように配設され、制御装置は、可動子の位置が一部の範囲から外れているときには第2の位置情報を、可動子の位置が一部の範囲に入っているときに当該範囲内で可動子を停止させる場合には第1の位置情報を、コイルに流れる電流の制御に用いる。
(もっと読む)
リニアモータ
【課題】可動子が可動範囲の端部に位置している場合に、複雑なシステムを必要とせずに、磁極推定を行うことができる位置まで可動子を移動させる。
【解決手段】本発明のリニアモータは、固定子13と、固定子13に沿って直線的に往復移動する可動子12と、固定子13または可動子12の一方に備えられる電機子eと、他方に備えられる永久磁石maと、可動子12の可動範囲の端部に位置するストッパ11とを有する。とくに、電機子eには、端部に磁性体e3が設けられ、電機子eへの電流の供給を断った状態で、可動子12がストッパ11に当接したときに、永久磁石maと磁性体e3との間に作用する磁力を受けて、可動子12が、ストッパ11から所定の距離だけ離れた位置まで移動するように、磁性体e3、ストッパ11および永久磁石maの端部の位置関係が特定されている。
(もっと読む)
位置決め装置及び工作機械装置
【課題】電源投入時に現在座標を許容誤差範囲の精度で検出し、所定位置への復帰動作をすることなく電源投入時の位置から動作を開始できる位置決め装置を提供する。
【解決手段】固定部12に対する可動部8の相対位置を検出するためのインクリメンタルエンコーダ23とアブソリュートエンコーダ21とを備え、制御装置19は、インクリメンタルエンコーダ23及びアブソリュートエンコーダ21の信号データの対応データを記憶した記憶手段と、電源投入時に読み取られた前記アブソリュートエンコーダ21の信号データから可動部8の初期座標を求める初期座標読取手段25と、電源投入時以後に読み取られたインクリメンタルエンコーダ23の信号データを基に可動部8の現在座標を求める現在座標読取手段25と、対応データによりインクリメンタルエンコーダ23の信号データに変換する信号変換手段と、を備えている。
(もっと読む)
モータの制御装置及び制御方法
【課題】電磁接触器等が作動してモータへの電力供給が遮断されたような場合でも、ベクトル制御を利用することにより、電源遮断時の惰性による移動距離を可及的に減少させ得るモータの制御装置及び制御方法を提供する。
【解決手段】目標とするモータの動作に対応して設定されるd軸電流指令とq軸電流指令に従ってインバータからモータに供給されるモータ電流のd軸成分であるd軸電流とq軸成分であるq軸電流を制御する制御部182,183とを備えたモータ制御装置において、交流電源110からコンバータ130への電力供給が遮断されると、平滑コンデンサ122に蓄えられていた電気エネルギーをインバータ140に供給すると共に、d軸電流を制御する制御部182,183に対して所定の大きさの緊急停止用のd軸電流指令を出し、リニアモータ1にd軸電流を印加して緊急停止させることを特徴とする。
(もっと読む)
リニアモータ式自動ドア
【課題】不用意にドアが手動モードに設定されて反開きになるのを防止し、かつ開動作中のドア本体を閉アシストした場合、閉端位置まで戻されてドアが全閉となるように使い勝手を良くしたリニアモータ式自動ドアを提供する。
【解決手段】開アシスト操作(ステップ106)と、その後手動モード判別時間内(ステップ112)の閉アシスト操作(ステップ113)を行うことで、始めて手動モード(ステップ114)に設定され、単に所定距離以上閉アシスト操作するだけでは手動モードにならないように制御する。手動モード判別点を開端直前点に設定する。開端直前でドア本体を開アシスト操作するとドア本体が開端に衝当する。そして、衝当後手動モード判別時間内に閉アシスト操作すると、手動モードに設定される。開動作中のドア本体を閉アシストして自動モード判別距離以上移動させると(ステップ104)、自動モードになってドアが全閉になる。
(もっと読む)
駆動案内システムおよび誤動作検出方法
【課題】オーバーシュートの発生による駆動案内装置の誤作動を最小限に抑制する。
【解決手段】ステップST1で、リニアモータにおいてオーバーシュートが発生しているか否かの判定を行う。発生の検出までステップST1の判定を継続する。発生した場合、ステップST2に移行して、発生位置情報の検出を行う。過去において、同位置での発生情報が記憶されていなければ、ステップST4で第1の位置情報および第1のオーバーシュート量を発生情報として記憶する。他方、前回の発生情報が記憶されていれば、ステップST3で前回の第1のオーバーシュート量と比較され、第2のオーバーシュート量が第1のオーバーシュート量より大きい場合に、アラーム回路103からオーバーシュートの発生を報知する。
(もっと読む)
リニアモータ式自動ドア
【課題】ドア本体の開動作中又は閉動作中に手動操作でドア本体を僅かに反転移動させるアシスト操作が実行されると、ドア本体がその後自動的に閉端位置又は開端位置まで反転走行して停止するアシスト機能を備えたリニアモータ式自動ドアにおいて、アシスト操作力を軽減し、確実にアシスト機能を果たすことができる自動ドアを提供すること。
【解決手段】、アシスト軽減領域においてはアシスト判定距離以上の反転移動がドア本体に生じたか否かを判定するに先立ち、ドア本体の走行速度がアシスト判定速度以下か否かを判別する。アシスト操作が行われてドア本体が所定のアシスト判定速度以下に減速した場合、一旦ドア本体を停止させる。停止後にアシスト判定距離以上の反転移動がドア本体に生じた場合、ドア本体を反転走行させている。
(もっと読む)
ステージ制御装置とその重心位置補正方法並びに機械パラメータ調整方法
【課題】 多軸で構成される機械(ステージ)を制御する場合、機械パラメータ(重心位置、質量、慣性モーメント)がずれている軸ならびにそのずれ量を容易に把握することができ、その機械パラメータ(重心位置、質量、慣性モーメント)を補正して機械(ステージ)を正確に制御することができるステージ制御装置とその重心位置補正方法並びに機械パラメータ調整方法を提供する。
【解決手段】 複数軸のうち、ある1軸の重心位置指令から他の1軸の重心位置偏差までのボード線図ゲイン特性を用いて、前記ある1軸の重心位置ずれを調整または補正する手段2,3,15を備えた。
(もっと読む)
位置決め装置、露光装置及びデバイス製造方法
【課題】装置全体が軽量化され、メンテナンス性を向上させた位置決め装置を提供する。
【解決手段】位置決め対象物を搭載して移動する第1ステージである微動ステージ4と、前記第1ステージを搭載して移動する第2ステージである粗動ステージ21と、前記第2ステージを駆動するリニアモータ1,2とを備え、前記第2ステージである粗動ステージ21は少なくとも一対に非接触に分割して配置され、前記リニアモータの可動子は分割された第2ステージの各々に設けられる。
(もっと読む)
完全な差動ボイスコイルモータ制御のための、オンチップ補償
差動ボイスコイルモータ制御機能を備えるディスクドライブコントローラが開示される。差動ボイスコイルモータ制御機能は、内部制御ループのための、直列接続された1以上のMOSトランジスタから成る抵抗器を含む、オンチップ補償ネットワークを備える。補償ネットワークにおけるMOSトランジスタのゲートは、調整電流に基づいてバイアス電圧で駆動される。調整電流は、集積回路における過程及び温度変化、例えばオンチップコンデンサ内の変化などに伴って変化するよう、得られる。オンチップ補償ネットワークは、内部制御ループを適切に補償するよう、ディスクドライブ内のボイスコイルモータの駆動において所望の周波数応答を与えるよう、十分正確に調整可能である。 (もっと読む)
被制御モータを有するリソグラフィ装置、並びにモータ制御システム及び方法
【課題】リソグラフィ装置の位置決めするためのモータ制御システムにおいて、永久磁石の温度変化によって生じるモータ定数の変化を補償すること。
【解決手段】位置決めシステムはパターニング支持体および基板支持体を位置決めする。この位置決めシステムは、ステータと支持体に連結されたムーバとを備えるモータと、モータに印加される電流を制御するための出力を提供するコントローラを備えたモータ制御システムとを有する。モータ制御システムは、ムーバおよび関連支持体の重量を補償するのに必要なコントローラ出力を決定し、このコントローラ出力の、ムーバおよび関連支持体にかかる重力を補償するのに必要な出力からの偏差を決定し、この偏差に基づいてモータに印加される電流を補正する。
(もっと読む)
ボイスコイルモーターと磁気弾性力による位置決め制御方法
【課題】本発明はボイスコイルモーターに磁気弾性力を発生させる方法と、その磁気弾性力を利用して位置決め制御する方法である。
【解決手段】磁気回路部品と電気回路部品を含み、該磁気回路部品は少なくとも一つの磁界を発生する。電気回路部品は少なくとも一つのコイルと少なくとも一つの磁気導体を含み、該コイルに電流を流す時、移動方向に推力が生じ、該磁気導体と前記磁気回路の間に、正方向のカップル力を発生させ、且つ前記移動方向に磁気弾性力を持たせる。更に前記ボイスコイルモーターに設置した懸架機構が、前記正方向のカップル力による予圧を受け、移動時のあそびを解消できる。前記推力と前記磁気弾性力とのバランスを利用するのみで板ばねのような弾性体を一切使わずに、位置決め制御ができる。
(もっと読む)
リニアモータ、ステージ装置、露光装置、デバイス製造方法およびリニアモータの位相補正方法
【課題】加減速時に重心軸周りに回転(ヨーイング)を起こしてもコイルと磁石の位置関係を正確に求め位相を補正することができ、カウンタマスを搭載したステージ装置に容易に対応可能で、大加速で駆動しても推力誤差による振動が発生しない、高精度な位置決めできるリニアモータ、ステージ装置およびリニアモータの位相補正方法、露光装置およびデバイス製造方法を提供する。
【解決手段】多相コイルユニットと、磁石ユニットと、を備えるリニアモータであって、前記多相コイルユニットおよび前記磁石ユニットの各々の位置を検出するための位置検出手段と、前記位置検出手段の出力に基づいて前記多相コイルに与える電流の位相を補正する補正手段と、を備えるリニアモータ。このリニアモータを用いるステージ装置およびリニアモータの位相補正方法。このステージ装置を用いる露光装置。この露光装置を用いるデバイス製造方法。
(もっと読む)
リニアパルスモータの制御方法
【課題】 プラテンの軌道面に沿ってX軸方向およびY軸方向に駆動される一群のフォーサを介してステージを所望位置に高精度で位置決めでき、かつ、迅速に整定できるリニアパルスモータの制御方法を提供する。
【解決手段】 プラテン4のXY平面上の所望位置に一群のフォーサ5X1,5X2,5Y1,5Y2を介してステージ3を駆動する際、フォーサ5X1,5X2,5Y1,5Y2のオープンループ制御によりステージ3は所望位置まで迅速に駆動され、フォーサ5X1,5X2,5Y1,5Y2のクローズドループ制御によりステージ3は所望位置に高精度に整定される。
(もっと読む)
1 - 20 / 26
[ Back to top ]