
Fターム[5H560DB00]の内容
無整流子電動機の制御 (40,007) | 速度検出 (1,604)
Fターム[5H560DB00]の下位に属するFターム
磁気的手段(エンコーダは除く) (181)
光学的手段(エンコーダは除く) (9)
速度発電機(TG) (10)
エンコーダ、パルスジェネレータ (78)
速度検出器を用いずに速度検出するもの (364)
その他の速度検出 (10)
位置検出器の出力に重畳させるもの (6)
位置検出器と兼用するもの (847)
Fターム[5H560DB00]に分類される特許
61 - 80 / 99
モータ制御装置、モータ制御方法
【課題】簡素で高効率のモータ制御装置、モータ制御方法を提案する。
【解決手段】同期モータ10およびそれを駆動するインバータ20と、それに入力する電源電圧値を検出する電源電圧検出部30と、駆動電流値を検出する電流検出部40と、回転速度を検出する速度検出部50と、実測された回転速度と指定された速度指令値との差に基づいた電流指令値を生成する電流指令値生成部70と、電流指令値生成部70が生成した電流指令値と駆動電流値より電圧指令値を生成する電圧指令値生成部80と、電圧指令値に基づいてインバータ20を制御するインバータ制御部90と、を備えるモータ制御装置1において、実測された電源電圧値と電圧指令値により変調率を生成して電流指令値生成部70に入力する変調率生成部100を有し、変調率生成部100は進角制御における変調率を所定の下限値から下回らないように変調率下限値を設けた。
(もっと読む)
モータ制御装置

【課題】モータのトルクハンチングを防止して、所望のトルクを安定して得ることを課題とする。
【解決手段】無効電流成分であるd軸電流と有効電流成分であるq軸電流のd−q座標系でモータの電機子電流を制御し、モータの界磁巻線に界磁電流を流すことで界磁束を発生させ、発生した界磁束に基づいてモータにトルクを発生させるモータ制御装置において、第1の電流変化量演算部21で第1の周期におけるd軸電流の電流変化量を演算し、第2の電流変化量演算部22で第1の周期よりも短い第2の周期におけるd軸電流の電流変化量を演算し、これらの電流変化量を加算し、その加算結果に基づいて補償量演算部24で界磁ベース電流を補正する界磁電流補償量を演算し、界磁ベース電流演算部25で得られた界磁ベース電流と界磁電流補償量とを加算して界磁電流指令値を演算して構成される。
(もっと読む)
モータ制御装置
【課題】パラメータ誤差を見込んだ回転数−電流進角特性をモータ個々に適した回転数−電流進角特性とする事により回転数範囲の制限を解消し効率を向上すること。
【解決手段】モータトルク推定部21によりモータ入力電力検出部20で検出したモータ入力電力とモータ4の実回転数からモータ駆動トルクを推定し、進角値推定指令部22により推定モータ駆動トルクと実際のモータ回転数と現在の直流電圧とモータパラメータからモータ駆動に必要な電流進角値を推定しその値を総合制御部6へ指令し、その電流進角値によりモータを駆動した場合のモータの実回転数と目標回転数の差異に従い進角特性変更部23により回転数−電流進角特性を更新する事により、モータ個々に最適な回転数−電流進角特性を決定する。
(もっと読む)
モータ制御方法及び装置
【課題】モータやコントロールユニット(ECU)の製造のバラツキや環境の変化が生じても、モータ印加電圧の飽和(デューティ100%)によるモータ異音がなく、電動パワーステアリング装置にも適用することができ、また、モータ最大出力を発生することができるモータ制御方法及び装置を提供する。
【解決手段】PWMのモータ駆動電圧指令値によってモータを駆動するモータ駆動方法において、前記モータの駆動電圧飽和度を演算し、前記駆動電圧飽和度に基づいてモータ電流指令制限値を補正する。
(もっと読む)
モータ制御装置及びモータ制御方法と電子写真式画像形成装置
【課題】モータの回転制御を迅速に行う。
【解決手段】現在の回転状態を検知して(S102)、現在の回転状態から目標の回転状態まで回転を変化させた場合の、目標の位相との予測位相差Sを計算する(S120)。その値が一定値以上なら、現在のモータの速度を一定値a変化させる(S107)。ここでは目標速度が増速であれば減速、減速であれば増速方向に変化させる。また、差が一定値以下になったなら、予測位相差の計算に用いた減速または増速のステップで、モータの回転を目標回転速度に向けて変化させる(S106)。
(もっと読む)
ランドリー用モータの駆動システム及び洗濯機
【課題】低速領域及び高速領域の何れにおいてもブラシレスDCモータを効率よく回転駆動させることができるランドリー用モータの駆動システムを提供する。
【解決手段】モータ15のステータ16において、ティース32に巻回されたステータコイル35を、各ティース32に巻回された部分毎の結線状態を切換え可能に構成する。これにより、ステータ16は、ステータコイル35の結線状態に応じて12極又は6極に切換え可能となる。そして、洗濯機の回転槽を低速高トルクで回転駆動させる洗濯運転時にはステータ16を12極とし、高速低トルクで回転駆動させる脱水運転時にはステータ16を6極とするようにステータコイル35の結線状態を切換える。
(もっと読む)
モータの制御装置
【課題】モータの誘起電圧定数を変更する場合であってもモータの通電電流に対する電流制御を適切に行う。
【解決手段】応答速度制御部55は、モータ11に対するトルク指令Tqと実トルク(つまり、トルクセンサによる検出値)との偏差、あるいは、所定時間区間におけるトルク指令Tqと実トルクとの各積分値同士の偏差に応じて、位相制御装置25によって内周側回転子と外周側回転子との間の相対的な位相を位相指令θcに応じた値に設定する制御動作において、位相制御装置25に具備されるアクチュエータの応答速度(つまり、位相変更速度)を制御し、各偏差が増大することに伴い、位相変更速度が減少傾向に変化するように設定する。
(もっと読む)
電動パワーステアリング装置の制御装置
【課題】絶対舵角センサを用いることなく絶対舵角を推定し、この絶対舵角を用いてラック軸がラックストロークエンドに達する操舵限界となったときの衝撃緩和を図る。
【解決手段】モータ回転角θから相対舵角φを算出し、ステアリング機構が中立状態又は最大舵角状態となったときに、これら状態における既知の絶対舵角とこの時点における相対舵角とを対応付け、以後これに基づく絶対舵角φabsを推定する。この絶対舵角の絶対値|φabs|がしきい値φ11以上であるときに“1”よりも小さくなる抑制ゲインK11を乗算して操舵補助トルク指令値IMを抑制し、さらに、絶対舵角φabsであるときのモータ角速度の目標値ωrと実際のモータ角速度ωとの差分を抑制するように操舵補助トルク指令値IMを補正し、ステアリングシャフト及び転舵輪間のトルク伝達部材に伝達されるトルクを抑制することで、操舵限界位置における衝撃低減を図る。
(もっと読む)
モータの制御装置
【課題】部品点数を増加することなしに遠心力によるロータの位相変更に係る作動液への影響を低減することができるモータの制御装置を提供する。
【解決手段】外周側回転子5、内周側回転子6の相対的な位相を作動流体の流体圧により変更する位相変更手段12は、位相変更の要求に係る制御指令に応じて前記作動流体の流体圧を制御する油圧制御装置を備え、外周側回転子5、内周側回転子6が回転する際に発生する遠心力により作動流体に作用する遠心流体圧を演算する演算手段と、この演算手段で演算した遠心流体圧に基づいて、油圧制御装置が制御する流体圧の補正を行う補正手段とを備えることを特徴とする。
(もっと読む)
モータ駆動装置及びそれを備えた家電機器、事務機器及び移動体
【課題】モータ負荷の変化に対応可能な高効率かつ低コストのモータ駆動装置を提供する。
【解決手段】駆動波形生成部(10)は、モータ(100)の各相に流れるべき電流の目標値を生成する。電流値算出部(70)は、電流検出部(60)から出力された検出信号及びモータ(100)の全相についての印加電圧信号に基づいて、各相に流れている電流の値を算出する。修正値算出部(20)は、モータ(100)の各相について、目標値と電流値算出部(70)によって算出された電流値との差分に基づいて修正値を算出する。目標修正部(30)は、モータ(100)の各相について、目標値に修正値を加算する。プリドライバ(40)は、目標修正部(30)の出力に基づいて、インバータ(50)のスイッチング動作を制御する。
(もっと読む)
モータ駆動装置、圧縮機駆動装置及び空調・冷凍装置
【課題】回転を止めることなくステータの巻線の接続状態を切り替えるモータ駆動装置を提供する。
【解決手段】永久磁石同期モータ1のステータ6の巻線U1〜W1、U2〜W2の接続状態を切り替え部3によって切り替えることにより、回転速度に応じて最適となる巻線U1〜W1、U2〜W2の接続状態を選択し、それによってモータ効率の高効率化を実現する。特に、永久磁石同期モータ1への電圧の印加を停止し、永久磁石同期モータ1が惰性回転を行っている間に巻線U1〜W1、U2〜W2の接続状態を切り替えることとしている。このような構成にすることで、モータ駆動装置7を備える空調・冷凍装置の動作を停止することなく、巻線U1〜W1、U2〜W2の接続状態を切り替えることができる。
(もっと読む)
電源装置およびこれを用いた空気調和機
【課題】全波整流回路にて得られる直流電圧よりも低い平均出力電圧を含む広い出力電圧範囲を有する電源装置を提供する。
【解決手段】交流電圧を直流電圧に整流する整流回路2と、交流電源1と整流回路2との間に設けたリアクタ3と、整流回路2の直流出力端間に接続した第1のコンデンサ4と、直流出力端の+極側に一端が接続した第2のコンデンサ5と、この第2のコンデンサ5の他端にアノードが接続した第1のダイオード6と、第1のダイオード6のカソードと直流出力端の−極側との間に接続した第3のコンデンサ7と、アノードが第1のダイオード6のカソードに接続し、カソードが直流出力端の+極側に接続した第2のダイオード8と、アノードが直流出力端の−極側に接続し、カソードが第1のダイオード6のアノードに接続した第3のダイオード9と、第3のダイオード9と並列接続した開閉手段10と、開閉手段10を駆動する開閉制御手段11とを備える。
(もっと読む)
インバータ装置
【課題】インバータ装置10において、平滑化用コンデンサ12の放電時にスイッチング素子A1、A2、A3,A4,A5,A6に電流を流す場合でも、スイッチング素子A1、A2、A3,A4,A5,A6が熱破壊するのを防止することである。
【解決手段】各スイッチング素子A1、A2、A3,A4,A5,A6のオンオフの切り替えを制御する制御部13を設ける。制御部13は、放電時に、走行用モータ14の駆動を停止しつつ、一部のスイッチング素子A1,A4,A6をオンし、残部のスイッチング素子A2,A3,A5をオフする。次いで、所定の時間経過後に、走行用モータ14の駆動を停止しつつ、一部のスイッチング素子A1,A4,A6をオフし、残部のスイッチング素子A2,A3,A5をオンする状態に切り替える。
(もっと読む)
モータ駆動装置
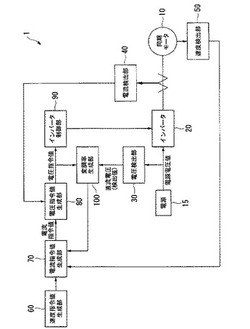
本発明のモータ駆動装置は、可動子および3相のコイル(31)を有するモータ(30)に駆動電圧および駆動電流を供給する通電器(20)と、モータの駆動速度および可動子の位置を検出し、駆動速度情報と位置情報とを含む信号を速度位置信号RSとして出力する速度位置検出器(40)と、駆動速度に対する基準信号CLKを出力する基準信号発生器(12)と、速度位置信号RS、基準信号CLKおよび任意の値を示す設定信号PAを用いて、コイル(31)に供給する駆動電圧の位相を示す位相信号PSを出力する位相信号生成器(11)と、位置情報と位相信号PSとを用いて、通電器(20)への制御信号を出力する波形生成器(14)とを備え、コイル(31)へ供給する駆動電圧の位相を駆動速度に比例するように調整し、その比例度合いは設定信号PAにより設定可能とする。  (もっと読む)
(もっと読む)
スイッチトリラクタンスモータの制御装置
【課題】低回転速度域から高回転速度域に至る全回転速度域で高いモータ出力特性を実現する。
【解決手段】スイッチトリラクタンスモータ2をPWM制御するための制御ユニット1において、アクセル操作量と回転速度とに応じてPWM制御のデューティ・通電角・通電角の進角を求めるための各マップ11・12・13を設け、入力されるアクセル操作量と検出された回転速度とに応じてCPU3により各値を設定し、それらの設定値に基づいてモータ2を駆動制御する。回転速度だけで制御することがないため、例えば電動カートに適用した場合に目標出力をアクセルペダルの踏み込み量(操作量)に対応させることにより、アクセル踏み込み量に応じてモータ出力を変化させることができるなど、内燃機関搭載カートと同様の感覚でアクセル操作することができる。
(もっと読む)
モータ制御装置
【課題】低コストかつコンパクトなサイズで、高回転域における無負荷運転が可能となるとともに電力変換器の故障時の保護運転も可能なモータ制御装置を提供する。
【解決手段】モータ31と、電源1と、電源とモータの電流経路を遮断する手段を備えた電力変換器とを備えたモータ制御装置において、回転数閾値とモータ回転数とを比較する比較器と、モータに流れる電流値を調整する電流調整器とを備え、比較器の比較結果に基づいて電流調整器によりモータに流れる電流値を調整した後、電源とモータの電流経路を遮断する手段を用いて電流経路を遮断する。
(もっと読む)
モータ制御装置及び電動パワーステアリング装置
【課題】エネルギー効率に優れたモータ制御装置及び電動パワーステアリング装置を提供すること。
【解決手段】マイコンは、モータの回転角速度ωmを検出し(ステップ101)、この検出された回転角速度ωmが第1の閾値ω1以下である場合(ステップ103:YES)には、上記昇圧制御を行わない(ステップ104)。
(もっと読む)
モータ駆動装置
【課題】インバータの過負荷を防止と動力性能の確保との両立が可能なモータ駆動装置を提供する。
【解決手段】交流モータの過負荷状態が検出されると、制御装置は、所定期間dtおきに、断続的に最大トルクT_maxを出力するように交流モータを駆動制御する。これにより、交流モータの出力トルクTは、所定期間dtだけ最大トルクT_maxを示した後に連続可能トルクT_stdまで低下するのを繰り返す。このとき、制御装置は、交流モータが最大トルクT_maxを出力した回数をカウントし、カウント値が予め設定した所定の許容回数Nに達したと判断されると、最大トルクT_maxの断続的な出力を停止して、最大トルクから漸減させた出力トルクを断続的に出力させる。これにより、インバータの素子温度が許容温度Th_limに達しない範囲内で最大トルクT_maxが有効に利用されるため、モータの動力性能が確保される。
(もっと読む)
電力変換装置
【課題】d軸とq軸のインダクタンスが等しい表面磁石形の永久磁石形ブラシレスモータでも初期磁極位置を推定し起動することができる電力変換装置を提供する。
【解決手段】磁極位置検出器3からの磁極位置信号取り込み部8と、起動時における永久磁石形ブラシレスモータ2の初期磁極位置を推定する際に磁極位置検出器3を用いる方法とd軸とq軸のインダクタンスの差を用いた磁極位置検出方法のいずれかを選択するパラメータ7を備え、この選択された方法で初期磁極位置を推定する。
(もっと読む)
車両用操舵装置
【課題】複数相モータのトルクリップルの発生を低減することができ、かつ、コストの低減を図ることができる車両用操舵装置を提供する。
【解決手段】モータ駆動回路とグランドとの間の電流経路上に、その電流経路を流れる電流値を検出するための単一の電流センサを設ける。そして、各相PWM信号を生成するための鋸波の位相をずらして、各相PWM信号のローレベルへの立ち下がりのタイミングをずらす。これにより、V相PWM信号がローレベルに立ち下がってから時間T1が経過するまでの期間における電流センサの出力信号に基づいて、電動モータMを流れるU相電流の値を得ることができる。また、W相PWM信号がローレベルに立ち下がってから時間T2が経過するまでの期間における電流センサ11の出力信号に基づいて、電動モータMを流れるU相電流およびV相電流の合計電流値を得ることができる。
(もっと読む)
61 - 80 / 99
[ Back to top ]