
Fターム[5H560DB00]の内容
無整流子電動機の制御 (40,007) | 速度検出 (1,604)
Fターム[5H560DB00]の下位に属するFターム
磁気的手段(エンコーダは除く) (181)
光学的手段(エンコーダは除く) (9)
速度発電機(TG) (10)
エンコーダ、パルスジェネレータ (78)
速度検出器を用いずに速度検出するもの (364)
その他の速度検出 (10)
位置検出器の出力に重畳させるもの (6)
位置検出器と兼用するもの (847)
Fターム[5H560DB00]に分類される特許
41 - 60 / 99
モータ制御装置および電動パワーステアリング装置

【課題】相間での抵抗差に起因するトルクリップルの発生が抑制されるようにブラシレスモータを駆動する。
【解決手段】オープンループ制御部22は、dq軸上の電流指令値id*、iq*と電機子巻線鎖交磁束数Φとモータにおけるロータの角速度ωeとに基づきdq軸上の電圧指令値vd 、vq を求め、dq軸/3相変換部23は、電圧指令値vd 、vq を相電圧指令値Vu,Vv,Vwに変換する。一方、相電流算出部41は、電流センサ15による検出値Iaから各相電流検出値Ixを順次算出し、記憶部42は、各相電流検出値Ixの検出時点の各相電圧指令値Vux,Vvx,Vwxを記憶する(x=u,v,w)。相抵抗算出部43は、これらの各相電流検出値Ixおよび各相電圧指令値Vux,Vvx,Vwxを用いて相抵抗Ru,Rv,Rwを算出し、補正部44は、これらの算出値に基づき、dq軸/3相変換部23により得られる相電圧指令値Vu,Vv,Vwを補正する。
(もっと読む)
モータ制御装置、モータ制御システムおよびモータ制御方法

【課題】 レゾルバから制御装置本体への信号線が断線もしくは短絡してもモータの制御を継続して行う。
【解決手段】 制御装置本体20のクロック出力部24は、三角波に同期してクロック信号S1を出力する。同期励磁信号形成回路6は、クロック信号S1を低域濾波して励磁基準信号S2をレゾルバ2へ出力する。データ形成部25は、レゾルバ2からの余弦信号S3と正弦信号S4から余弦波振幅信号Lcと正弦波振幅信号Lsを生成する。第1の回転角検出手段29は、余弦波振幅信号Lcを用いて第1の回転角θ1を算出する。第2の回転角検出手段30は、正弦波振幅信号Lsを用いて第2の回転角θ2を算出する。第3の回転角検出手段31は、余弦波振幅信号Lcおよび正弦波振幅信号Lsを用いて第3の回転角θ3を算出する。それぞれの回転角から異常を検出し正常な回転角θを選択する。
(もっと読む)
電動車両の制御装置およびそれを備えた電動車両、ならびに電動車両の制御方法およびその制御方法をコンピュータに実行させるためのプログラムを記録したコンピュータ読取可能な記録媒体
【課題】インバータの損失を効果的に低減可能な電動車両の制御装置およびそれを備えた電動車両を提供する。
【解決手段】キャリア周波数設定部64は、モータジェネレータMGのトルク指令TRおよびモータ回転数MRNに基づいてキャリア周波数FCを設定する。PWM信号生成部68は、各相電圧指令Vu,Vv,Vwに対応する各相変調波を生成し、各相変調波とキャリア周波数FCを有する搬送波(キャリア)との大小関係に応じて各相PWM信号Pu,Pv,Pwを生成する。PWMセンター制御部66は、キャリア周波数FCが予め定められた周波数よりも低いとき、PWMセンターを可変制御するためのPWMセンター補正値ΔCEを生成してPWM信号生成部68へ出力する。
(もっと読む)
モータ駆動装置
【課題】駆動デューティが大きくなったときでもスイッチング素子を飽和領域で使用できるようにする。
【解決手段】モータ駆動装置1は、ブラシレスモータ2の回転制御をするモータドライバ回路3を有する。モータドライバ回路3は、モータ駆動回路14のスイッチング素子のFETの開閉を切り替えるPWM信号を作成する制御回路11が設けられている。制御回路11は、駆動デューティが90%以上の領域では、キャリア周波数演算部21がマップ22を検索してキャリア周波数を下げる。キャリア周波数が下がることで、同じ駆動デューティであっても、FETが開閉動作するために必要な時間が確保される。
(もっと読む)
モータ制御装置
【課題】 バッテリを流れる電流値からスイッチング素子を流れる電流を推定し、推定値に基づき過電流防止制御を行うモータ制御装置を提供する。
【解決手段】 デューティ比に基づくPWM制御により、バッテリ(BT)からブラシレスモータ(M)に流れる電流を制御するモータ制御装置(1)であって、バッテリ電流値を検出する電流検出手段(7・11)と、バッテリ電流値が所定の第1判定値より大きく、かつデューティ比が所定の第2判定値より大きい場合に第1推定方法を選択し、その他の場合に第2推定方法を選択する推定方法決定手段(19)と、第1推定方法を選択した場合には、バッテリ電流値とデューティ比とに基づき推定モータ電流値を算出し、第2推定方法を選択した場合には、バッテリ電流値を推定モータ電流値とする推定モータ電流値算出手段(20)とを有することを特徴とする。
(もっと読む)
電動機付ターボチャージャ制御システム
【課題】電動機付ターボチャージャにおける電動機の回生現象を防止すると共に、電動機の高効率化及び小型化を図る。
【解決手段】エンジンに付設されたターボチャージャに、インバータによって駆動信号が供給されるアシスト用の電動機が連結された電動機付ターボチャージャの制御システムであって、前記インバータと前記電動機とを接続する駆動信号線の開閉状態を切り替える開閉切替手段と、前記電動機の回転状態を示す回転状態値を把握する回転状態把握手段と、前記回転状態把握手段によって把握された前記回転状態値が予め設定された回転状態設定値以上の値になった場合に、前記開閉切替手段を開状態に切り替わるように制御する開閉制御手段と、を具備し、前記回転状態設定値は、前記電動機の誘導起電力が前記インバータの直流電圧と一致する場合における前記電動機の回転状態値に設定されている。
(もっと読む)
モータ駆動装置、集積回路装置およびモータ装置
【課題】正弦波駆動方式を利用したモータ駆動装置の回転むらを抑制し、回転速度に応じた最適モータ駆動を行う。
【解決手段】複数組のスイッチ素子を有したインバータ20と、モータ10を交流駆動するための波形信号WFを生成する波形生成部31と、波形信号WFによりパルス幅変調されたパルス信号を生成するパルス幅変調部32と、駆動巻線に発生する誘起電圧の極性を判別する極性判別部33と、スイッチ素子を相補的にスイッチングする駆動信号を生成する高速駆動モードと極性判別部33が判定した極性に応じて正極側と負極側とのスイッチ素子の一方をオフとするような駆動信号を生成する低速駆動モードとが選択可能な駆動モード選択部34とを備える。
(もっと読む)
DCモータおよびそれを備えたポンプ
【課題】モータ駆動装置の構成部品の1つである半導体スイッチの全損失を低減して半導体スイッチの発熱を抑制し、放熱部品の小型化、低コスト化、或いは半導体スイッチの長寿命化を図り得るDCモータおよびそれを備えたポンプを提供する。
【解決手段】制御手段により、マグネットロータ8の回転によって生じる磁極の変化に応じた周期に基づいて三相のモータ巻線に流れる電流を循環的に相切換え制御しているときに、モータ巻線に流れる電流のピーク値が回転速度信号(SP信号)を変換して生成される閾値に達した場合、その閾値に達した時を含む周期において電流供給している相のモータ巻線への電流供給をその閾値に達した時から該周期の終わりまでの期間だけ強制的に停止する。
(もっと読む)
車両および昇温方法
【課題】外部の温度環境にかかわらず、永久磁石による電磁力を用いて車輪を駆動する電動機で生じる逆起電圧を抑制することのできる車両を提供する
【解決手段】ブレーキディスク500は、駆動軸2およびホイールハブ220に締結され、ブレーキキャリパ510によって軸方向に駆動されるブレーキパッド530との間で周方向の摩擦力を発生する。モータジェネレータMGL,MGRを昇温する必要がある場合には、所定の摩擦熱が生じるようにECUが制御指令BRLを出力する。この摩擦力によってブレーキディスク500からは摩擦熱が発生し、このブレーキディスク500で発生する熱の対流(熱流)によって、モータジェネレータMGL,MGRが昇温される。
(もっと読む)
車両搭載用モータ制御装置
【課題】モータあるいはジェネレータの線間放電の発生を抑制することができる車両搭載用モータ制御装置および車両搭載用ジェネレータ制御装置を提供すること。
【解決手段】ハイブリッド車両1−1に搭載されるモータジェネレータ20,30への印加電圧を制御するモータECU53において、気圧を推定する気圧推定部53aを備え、推定された気圧の低下時に、印加電圧の上限値を制限する。従って、線間放電が発生しやすい気圧の低下時に、印加電圧の上限値を制限することで、線間放電が発生しにくい状態にモータジェネレータ20,30を制御する。
(もっと読む)
車両及びその制御方法
【課題】電動機の保護を図ると共により容易に走行を開始することができる。
【解決手段】ハイブリッド自動車20は、モータMG2のロック時制御の実行条件が成立しているときに、モータMG2の回転数Nm2の絶対値がモータロック状態である低回転数の範囲である閾値Nm2refを超えるような第1トルクTm2Aとこの第1トルクTm2Aより大きい第2トルクTm2Bとを設定し、ロック時制御の実行条件が成立しているときに、この設定された第1トルクTm2Aと第2トルクTm2Bとの間で変化させたトルクを出力するロック時制御を実行するようモータMG2を制御する。このように、モータMG2がロック状態であるときには、トルクを変化させてモータMG2の回転数Nm2を変化させ、電流がモータMG2の特定の相に片寄って流れ温度上昇するのを抑制すると共にモータMG2への電流を流しやすくする。
(もっと読む)
モータ駆動自動車
【課題】モータの回転子の絶対回転角を示す絶対角信号に異常が生じた場合であってもモータを始動することが可能であり、さらに、始動後において高精度な制御を行い十分な動力性能を得ることが可能なモータ駆動自動車を提供することを目的とする。
【解決手段】モータと、レゾルバと、R/Dコンバータと、R/Dコンバータの出力に基づいてモータを制御するモータ制御装置と、を備えるモータ駆動自動車であって、R/Dコンバータは、相対角信号と、基準信号と、絶対角信号と、を出力し、モータ制御装置は、絶対角信号の異常を検知する異常検知手段と、基準信号および前記相対角信号が正常か否かを判断する判断手段と、を有し、異常検知手段により絶対角信号の異常が検知され、かつ、判断手段により基準信号および相対角信号が正常と判断された場合にモータの制御を開始することを特徴とする。
(もっと読む)
ブラシレス直流励磁機を備えた同期モータの起動方法
界磁電流を最大許容励磁機固定子電流(すなわち、移行速度で主磁界に定格無負荷電流を生じさせることになる電流)に設定して、磁化電流を加え、固定子に磁束を生じさせることによって、モータを誘導モータとして起動することが可能になる、モータのための起動方法及びシステム。モータの固定子電流は、モータがいかなる静摩擦であろうと克服するのに十分な解放トルクを発生可能にする値に維持される。特定の移行速度でまたはある時間期間の経過後、駆動部が初期磁化電流を除去することによって誘導モータ制御から同期モータ制御への移行が開始され、その後、DC励磁機によってモータに界磁電流が加えられる。この移行が完了すると、駆動部は、所望の速度要求値まで一定比率で上昇させることが可能になる。 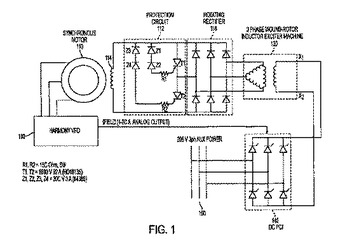 (もっと読む)
(もっと読む)
電動車両、電動車両の制御方法、および電動車両の制御方法をコンピュータに実行させるためのプログラムを記録したコンピュータ読取可能な記録媒体
【課題】電動機で発生した逆起電力が回生電力として流れることにより意図しない回生制動が発生するのを防止可能な電動車両を提供する。
【解決手段】目標電圧設定部32は、インバータ冷却水温Tなどのパラメータの変化に応じて目標電圧VHRを可変設定する。ゲート遮断制御部36は、インバータのゲート遮断およびその解除を制御する。ゲート遮断制御部36は、目標電圧VHRに基づいて、ゲート遮断を解除して零トルク制御を開始するモータ回転数のしきい値を設定する。そして、ゲート遮断制御部36は、モータ回転数MRNがしきい値を超えるとゲート遮断を解除し、インバータ制御部38によって零トルク制御が実行される。
(もっと読む)
電動車両用駆動装置
【課題】DCブラシレスモータなどを用いた電動車両において、無負荷回転数以上の回転数になった場合の回生制御を簡単かつ高精度に実現する。
【解決手段】回転速度が無負荷回転速度よりも高いことを例えば回生デューティ比が0%である場合により判断し、その場合には検出された回生電流が目標回生電流よりも小さい場合にはコアを入れて界磁を増大し、回生電流が目標回生電流よりも大きい場合にはコアを抜いて界磁を減少して、回生電流を制御できることから、過回転を防止すると共に、無負荷回転速度を超えて走行する場合の回転速度を回生電流に基づいて適切に調整することができる。その制御をステータとロータとの距離の増減制御という簡単な構造で効果的に行うことができ、回生制御を簡単かつ高精度に実現し得る。
(もっと読む)
操舵システム
【課題】後輪を操舵可能な車両において、前輪操舵に加えて後輪も操舵した場合に、運転者が不自然な操舵フィーリングを感じるという問題がある。
【解決手段】後輪のトー角に基づいて、電動パワーステアリング装置のダンピング制御をする。すなわち、車両が旋回するときに、後輪がトーアウトするときは、補償値Iを大きくして反力を大きくし、後輪がトーインするときは、補償値Iを小さくして反力を小さくすることを特徴とする。
(もっと読む)
バケットの駆動装置
【課題】可変速(停止を含む)で、かつ、高効率化及び軽量化が可能であり、さらに、モータ制御装置とバケット(モータ)との間を接続する信号線に付随するノイズ等の問題点を解消するようにしたバケットの駆動装置を提供すること。
【解決手段】バケットの開閉動作を、バケットに搭載した磁石モータ4にて駆動される油圧ポンプ3から供給される作動油によってバケットシリンダ1を操作して行うようにしたバケットの駆動装置であって、クレーンのクラブ上にモータ制御装置7を設置するとともに、このモータ制御装置7とバケットとの間をケーブルで接続し、バケットシリンダ1に作動油を供給する油圧回路の作動油の圧力値の信号をモータ制御装置7に導入してモータ制御装置7に予め設定した回転数パターンによってモータ4の回転数を制御し、バケットシリンダ1を操作するようにする。
(もっと読む)
二重ローター電磁装置の制御
【課題】逆起電力を減少させるために、装置が作動している間にローターの相対的な角度変位を調整するための機構を備えた二重ローターの電気同期機の必要性が存在する。高いトルク負荷を担持することができる調整機構の必要性も存在する。
【解決手段】電気同期機には、ハウジングと、当該ハウジング内に回転可能に支持されている第一及び第二のシャフトとが備えられ、当該第一及び第二のシャフトの各々は、対応するローターが固定されており、これらは両方とも永久磁石界磁極を有している。各ローターは、対応する環状のステータによって包囲されており、ステータコイルが両方のステータに巻かれている。第一のシャフトと第二のシャフトとの間に遊星変速機が結合されており、当該遊星変速機は、第一及び第二のシャフトが回転中に、第一のシャフトに対する第二のシャフトの配向角を調整するように作動可能である。
(もっと読む)
インホイールモータ駆動装置
【課題】 低速回転時にモータドライバ回路およびモータコイルに過大電流が流れるのを防止できる信頼性の高いインホイールモータ駆動装置を提供する。
【解決手段】 車輪用軸受A、モータB、およびこのモータBと車輪用軸受との間に介在した減速機を有し、モータBに駆動電流を流すモータドライバ回路51を設けたインホイールモータ駆動装置とする。前記モータドライバ回路51には、低速回転域でモータ駆動電圧を低くし、高速回転域でモータ駆動電圧を高く設定する回転域対応電圧変更手段58を設ける。
(もっと読む)
モータ駆動装置およびこれを具備した冷蔵庫
【課題】インバータ駆動制御における高効率、高トルク運転、高速駆動が可能なモータ駆動装置を提供する。
【解決手段】永久磁石を有する回転子と三相巻線を有する固定子からなるブラシレスDCモータ6と、前記三相巻線に電力を供給するインバータ5を有し、矩形波または正弦波あるいはそれに準じる波形を、通電角60度以上180度未満の範囲で、PWMデューティが最大となるように出力することで、インバータ5のスイッチング損失を低減し、モータ駆動装置の高効率化を図るものである。
(もっと読む)
41 - 60 / 99
[ Back to top ]