
Fターム[5H560DB00]の内容
無整流子電動機の制御 (40,007) | 速度検出 (1,604)
Fターム[5H560DB00]の下位に属するFターム
磁気的手段(エンコーダは除く) (181)
光学的手段(エンコーダは除く) (9)
速度発電機(TG) (10)
エンコーダ、パルスジェネレータ (78)
速度検出器を用いずに速度検出するもの (364)
その他の速度検出 (10)
位置検出器の出力に重畳させるもの (6)
位置検出器と兼用するもの (847)
Fターム[5H560DB00]に分類される特許
21 - 40 / 99
モータ制御装置
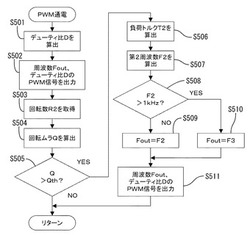
【課題】本発明は、モータを滑らかにPWM駆動可能なモータ制御装置を提供する。
【解決手段】モータ制御装置10は、モータ12のオンオフ切り替えを行う半導体スイッチ素子13と、電圧センサ17によって検知された電源ライン15の検知電圧Eが電圧閾値Ethを超えるかどうかを判断し、検知電圧Eが電圧閾値Ethを超えないと判断した場合にはモータ12をDC駆動させるDC駆動信号を半導体スイッチ素子13に出力すると共に、検知電圧Eが閾値電圧Ethを超えると判断した場合には、モータ12の負荷トルクTに基づいて設定された第1周波数F1でモータをPWM駆動させる第1PWM信号を生成し、第1PWM信号を半導体スイッチ素子13に出力するCPU14と、を備える。
(もっと読む)
DCブラシレスモータ駆動制御装置および画像形成装置

【課題】小さな回生電流で、かつ、短時間にモータの回転を止めることのできるDCブラシレスモータ駆動制御装置およびこの駆動制御装置を備えた画像形成装置を提供する。
【解決手段】回転速度を指示するクロック信号に応じて回転速度が制御されるDCブラシレスモータ駆動制御装置であって、前記DCブラシレスモータ回転停止の際に、先ず、前記クロック信号を停止して(S3)前記DCブラシレスモータの回転速度が所定の回転速度まで低下するのを待ち(S6)、前記所定の回転速度に達したときにショートブレーキを開始して(S7)回転を停止するように制御する制御手段を備えたDCブラシレスモータ駆動制御装置により前記課題を解決する。
(もっと読む)
車両用モータ制御装置及びその方法
【課題】簡易なセンサでも最適にモータ制御を行う。
【解決手段】モータ制御装置は、センサを用いることなくモータの回転角を推定してモータを制御するセンサレス制御とセンサの検出値を用いるモータ制御とで相互に切り換わった場合(ステップS11)、センサレス制御の制御域とセンサの検出値を用いるモータ制御の制御域との相互の切り換え領域で、センサレス制御で推定したモータの回転角とセンサの検出値から得たモータ回転角とを用いてモータを制御する(ステップS12、コンバインモード)。
(もっと読む)
車両用モータ制御装置及びその方法
【課題】簡易なセンサでも最適にモータ制御を行う。
【解決手段】モータ制御装置は、モータ2の回転が定常状態にあると判定した場合、センサを用いることなくモータの回転角を推定してモータを制御するセンサレス制御をし、モータ2の回転が過渡変動状態にあると判定した場合(ステップS1〜ステップS3の何れかが“Yes”)、又はモータ2の回転が定常状態から過渡変動状態に遷移すると判定した場合(ステップS4〜ステップS5の何れかが“Yes”)、センサの検出値を基にモータ2の回転角を得て、その得たモータ2の回転角を基にモータ2を制御する(ステップS6)。
(もっと読む)
車両のモータ制御システム
【課題】矩形波電圧制御を実行するモータの制御装置において、トルクの急激な変動が抑制された車両のモータ制御システムを提供する。
【解決手段】制御装置30は、インバータ22からモータジェネレータMG2に与える矩形波電圧の位相θに基づいて電圧コンバータ12に電圧変換動作を行なわせるか否かを決定する。そして制御装置30は、矩形波電圧の位相θがしきい値に到達するまでは電圧コンバータ12に電圧変換動作を行なわせずにバッテリB1の電圧をそのままインバータ22に供給させ、矩形波電圧の位相θがしきい値に一旦到達した後は電圧コンバータ12に電圧変換動作を行なわせてバッテリB1の電圧を昇圧してインバータ22に供給させる。
(もっと読む)
回転電機制御装置
【課題】回転電機制御装置において、回転電機の回転数が高速になっても制御処理を適切に行うことを可能とすることである。
【解決手段】回転電機制御装置10は、回転電機8に接続される電源回路14と、電源回路14の動作を制御する制御部30を含んで構成される。制御部30は、トルク指令値と回転電機8の出力トルクである実トルクとに基いて、回転電機8に印加する矩形波電圧信号の電圧位相操作量を算出する電圧位相操作量算出部32と、回転電機8の回転数Nに基いて、電圧位相操作量を制限する操作量制限部34と、制限された範囲内で矩形波信号を生成してインバータ24に供給する矩形波生成部36を含んで構成される。
(もっと読む)
モータ制御装置
【課題】低コストの構成により、モータの回生による制動力の調整をすることができるモータ制御装置を提供する。
【解決手段】モータ制御装置1は、インバータ回路4、制御回路13、及び、回生スイッチ(入力スイッチ)111を備える。制御回路13は、回生モードにおいて、回生スイッチ111から入力されるオンとオフとに対する時間間隔に応じて、インバータ回路4のPWM制御のデューティ比を設定することにより、モータ5が発生する交流電圧を直流電圧に変換させて、電源装置2に充電する。
(もっと読む)
連続流式全置換型人工心臓の生理学的制御方法
その両端に第1インペラと第2インペラを取り付けたロータに接続された電気モータを含んだポンプを制御する方法が開示されており、(a)モータを使ってロータを駆動し、第1インペラから第1流体回路、第2インペラ、第2流体回路を通して流体を循環させ、第1インペラに戻し、(b)第1モータパラメータに基づいて第1流体回路の抵抗を決定し、(c)第2モータパラメータに基づいて第1流体回路を通過する流量を決定し、(d)ポンプの少なくとも1種の運用パラメータを変化させ、第1流体回路の流量と抵抗との間に所定の関係を維持させる。 (もっと読む)
モータ制御装置およびそれを用いた画像形成装置
【課題】 駆動速度に応じてモータの制御方式を切り替え最適な制御を行うことでモータの制御性を向上させる。また、画像形成装置にこの制御方式を採用することで安価で高画質化を実現する。
【解決手段】 駆動速度に応じてモータの制御を行う際の演算方式とモータに送信する制御信号および、モータ受信した制御信号の処理方法を切り替える。あるいはモータを制御している状態でモータの回転速度をモニタし、速度設定値と回転速度との偏差が所定値より大きい場合はモータの制御を行う際の演算方式とモータに送信する制御信号および、モータ受信した制御信号の処理方法を切り替える。
(もっと読む)
自動変速機の制御装置
【課題】電動機の駆動開始直後のトルクを瞬時に補正することができ、コイル温度が変化しても駆動開始直後(過渡時)のギア動作を適切に補正することが可能となる変速機の制御装置を提供する。
【解決手段】ギアチェンジ終了判定手段と、電動機停止判定手段と、変速開始前の停止中の電動機に所定電圧を印加する状態と印加しない状態を所定間隔で交互に繰り返し前記電動機のコイル抵抗を推定するコイル抵抗推定手段を備え、前記ギアチェンジ終了判定手段と電動機停止判定手段とにより電動機が停止していると判断した場合に、変速開始前の電動機停止中に、前記コイル抵抗推定手段によって算出したコイル抵抗値に応じて変速開始後の前記電動機に印加する指令電圧の初期値を所定期間において補正するようにした。
(もっと読む)
モータ駆動装置およびモータ駆動装置の制御方法
【課題】永久磁石モータを駆動するモータ駆動装置において、永久磁石モータの減磁を抑制する。
【解決手段】制御装置30は、永久磁石モータM1の要求出力に応じてインバータ14のIGBT素子Q3〜Q8によるスイッチング動作を制御する。制御装置30は、温度センサ40,42の出力に基づき永久磁石モータM1の磁石温度を検出する磁石温度検出手段と、予め求められた永久磁石モータM1の出力と永久磁石モータM1に減磁を生じさせない限界温度との関係に基づいて、永久磁石モータM1の要求出力に対応する磁石温度の閾値を設定する設定手段と、磁石温度検出手段によって検出された磁石温度が閾値を超えたときに、永久磁石モータM1を流れるモータ電流に重畳したリプル電流を低減するように、IGBT素子Q3〜Q8をスイッチングするキャリア周波数を変更するキャリア周波数制御手段とを含む。
(もっと読む)
PMモータの制御装置及び制御方法
【課題】周期的な外乱であるトルクリプルを精度よく抑制することができるPMモータの制御方法及び制御装置を提供すること。
【解決手段】本制御装置は、モータ角速度ω、非線形摩擦補償トルクTf(ω)、及びモータトルク指令値Tref等からトルクリプル値を推定するトルクリプル推定手段と、第1のスイッチを外乱1周期の間のみオンにして、トルクリプル推定手段によって推定したトルクリプル値から繰り返し補償信号を生成し、かつ、周期外乱データをメモリに保存し、第2のスイッチをオンにして、周期外乱データを、1サンプル先の予見値を与える外乱補償信号として順番に出力することで補償を行う周期信号発生器とを備えている。
(もっと読む)
回転電機
【課題】始動に十分な始動トルクを確保できる回転電機を提供することを課題とする。
【解決手段】ロータ2の始動時に、対向する永久磁石5N、5Sとステータ1のティース3とが反磁界となるように励磁電流を供給して励磁する一方、非対向の永久磁石5N、5Sとステータ1のティース3に対しては回転トルクの方向に対応した励磁電流を供給して励磁することを特徴とする。
(もっと読む)
モータ制御装置、及びモータ制御方法
【課題】 製造誤差を有するマグネットロータの鎖交磁束数を検出する。
【解決手段】磁界を発生するステータコイルと前記磁界により回転して車両の操舵軸にトルクを出力するマグネットロータを有するモータの制御装置は、前記ステータコイルに駆動電圧を供給しない状態で前記操舵軸に連動して前記マグネットロータが回転するときに前記ステータコイルに発生する発生電圧と前記マグネットロータの回転速度とに基づいて前記鎖交磁束数を検出する鎖交磁束数検出手段を有するので、製造誤差を有するマグネットロータの鎖交磁束数を検出できる。
(もっと読む)
電力変換装置の制御装置および制御方法
【課題】制御周期中にキャリア周期を変更しても、各キャリア周期に応じたデューティ指令値のレベル値を正確に決定し、電力変換装置の出力変動を防止する。
【解決手段】PWMインバータ2の制御装置は、PWM制御部5と、キャリア周期変更部10と、電流指令生成部11を備える。PWM制御部5は、制御周期毎にPWMインバータ2の出力または負荷装置である三相モータ3の状態の計測結果に基づいて、デューティ指令値を算出して出力する。キャリア信号生成部7は、PWM制御部5がデューティ指令値と比較するキャリア波の周期であるキャリア信号を生成する。キャリア周期変更部10は、制御周期とキャリア周期を同期させながら、キャリア周期を時間とともに変化させる。
(もっと読む)
圧縮機制御装置
【課題】圧縮機制御装置において、圧縮機の回転数毎に定められた進角を圧縮機進角決定手段に記憶させて圧縮機を制御しているため、圧縮機の負荷変動に関係なく進角が決定されるので、圧縮機の負荷条件で、より最適な進角で圧縮機を制御できないという課題を有していた。
【解決手段】圧縮機電流検出手段3で検出した圧縮機電流と圧縮機回転数検出手段5で検出した回転数に基づいて進角を決定することによって、最適な進角で圧縮機制御を可能にすることができる。
(もっと読む)
電動車両用電源装置
【課題】電動車両用電源装置において、インバータの入力電圧の検出なしにインバータによって走行用モータの駆動制御を行う。
【解決手段】バッテリ11と、インバータ30と、インバータ30によって駆動用電力を調整して走行用モータ50の制御を行う制御部60とを備え、制御部60は、走行用モータ50の回転数を取得する回転数センサ56と、取得した走行用モータ50の回転数から走行用モータ50の推定逆起電圧を計算し、推定逆起電圧をインバータ30の入力電圧としてインバータ30を調整し、走行用モータ50の制御を行う。
(もっと読む)
モータ制御装置および電動パワーステアリング装置
【課題】検出・制御タイミングのずれなどがあっても、モータの制御を精度良く行う。
【解決手段】角度算出部24はロータの角度θa を求め、3相/dq軸変換部25は検出角度θa に対して電流検出時点との検出ずれ量を加算または減算した補正検出角度θc に基づく変換を行ってdq座標軸上の検出電流id 、iq を出力する。指令電流算出部21は、操舵トルクTと車速Sに基づき、dq座標軸上の指令電流id*、iq*を求める。フィードバック制御部22は、指令電流id* 、iq* と検出電流id 、iq に基づき、dq座標軸上の指令電圧vd 、vq を求め、dq軸/3相変換部23は、検出角度θa に対してモータ駆動時点との検出ずれ量を加算した補正検出角度θb に基づき指令電圧vd 、vq を3相の指令電圧に変換する。この指令電圧により上記ずれが解消され、高い精度でモータを駆動できる。
(もっと読む)
モータ駆動制御装置及びこれを使用した電動パワーステアリング装置
【課題】簡単な回路構成で正確に全電流検出を行うことができるモータ駆動制御装置及びこれを使用した電動パワーステアリング装置を提供する。
【解決手段】多相モータ12にモータ駆動回路19から多相駆動電流を供給して駆動制御するモータ駆動制御装置であって、前記各相の駆動電流を個別に検出する電流検出手段17u〜17wと、該電流検出手段で検出した相駆動電流が供給されるダイオードオア回路22を含む最大電流検出手段21と、該最大電流検出手段で検出した最大相電流に基づいて前記モータ駆動回路の異常を検出する回路異常検出手段とを備えている。
(もっと読む)
永久磁石式回転電機、永久磁石式回転電機の組立方法、永久磁石式回転電機の組立方法及び永久磁石電動機ドライブシステム
【課題】高出力で低速から高速までの広範囲での可変速運転を可能とし、広い運転範囲で効率向上、信頼性向上、製造性向上が図れる永久磁石式回転電機を提供する。
【解決手段】本発明は、回転子1の回転子鉄心2における隣り合う磁極鉄心部7同士を磁気的に連結する磁極間ヨーク部分に電機子巻線21に流される所定の磁化電流が作る磁界の磁束にて磁気飽和する磁路狭部分11を形成し、複数の磁極鉄心部7それぞれにおいて電機子巻線21に流される磁化電流が作る磁界により複数個の第1の永久磁石3それぞれを磁化させて第1の永久磁石それぞれの磁束量を不可逆的に変化させることができるようにした永久磁石式回転電機である。
(もっと読む)
21 - 40 / 99
[ Back to top ]