
Fターム[5H560SS02]の内容
無整流子電動機の制御 (40,007) | 電源回路 (1,741) | 直流電源 (1,289) | 電池、バッテリ (747)
Fターム[5H560SS02]に分類される特許
81 - 100 / 747
電動パワーステアリング装置
【課題】部品点数の増加やコストアップを抑制した簡素な構成のモータ回転角検出手段を使用して運転者に不快感を与えることを抑制する。
【解決手段】運転者の前記操舵系に対する操舵量に応じた前記電動モータの相対角度情報を算出するモータ相対角度情報算出部48a〜48cと、該モータ相対角度情報算出部が相対角度情報を得られない状態となることを防止して常時相対角度情報の生成を可能とする相対角度情報補完部48eとを有するモータ相対角度検出手段48を備えている。前記相対角度情報補完部は、相対角速度を検出し、検出した相対角速度が少なくとも零近傍の不感帯内となったとき、前記モータ相対角度検出手段により相対角度情報が得られるように前記相対角速度に所定周期毎に符号を変更するオフセット値を加算する相対角速度オフセット処理を行う。
(もっと読む)
電動パワーステアリング装置の制御装置

【課題】モータと制御装置の各相特性を相殺して所望特性に変換すると共に、各相特性を一致させることによりトルクや速度等のリップル精度を向上させ、異音の発生がなく操舵に違和感のない電動パワーステアリング装置の制御装置を提供する。
【解決手段】ステアリングシャフトに発生する操舵トルク及び車速に基づいて操舵トルク補助指令値を算出し、操舵トルク補助指令値から各相電流指令値を算出し、各相電流指令値とモータの各相電流値とから算出した電流制御値に基づいてステアリング機構に操舵補助力を与えるモータを制御するようになっている電動パワーステアリング装置の制御装置において、モータと制御装置の各相特性を相殺する特性を有するフィルタを各経路に配設し、モータと制御装置の各相特性を一致させると共に、モータと制御装置の各相特性を所望特性とする。
(もっと読む)
電動パワーステアリング装置
【課題】モータ駆動回路のMOS−FETの保護手段が異常となっても、モータ駆動回路のMOS−FETの動作を確実に停止できる電動パワーステアリング装置を提供する。
【解決手段】モータ駆動中にトランジスタ31の出力の短絡故障が検出されると、マイコン5はイネーブル信号ENBをオフし、FET20がオフ状態となることによって、モータ駆動回路7のMOS−FET(U2)のゲートがプリドライバ6のモータ駆動信号から遮断される。同時に、MOS−FET(U2)のゲート電荷は抵抗32,30,トランジスタ31のコレクタ−エミッタを通して放電されることによってゲート電圧が低下し、MOS−FET(U2)を短時間でオフできる
(もっと読む)
モータ制御装置
【課題】異常が発生した場合においても安定したモータ駆動を続けることができるモータ制御装置を低コストで提供する。
【解決手段】モータ制御装置1の各相に電流遮断回路23、38を設ける。プリドライバ回路12〜14のスイッチ素子20、21、35、36のいずれかに外乱が印加され、接合破壊のために短絡故障して大電流が流れたときに、電流遮断回路23、38によって故障したプリドライバ回路12、13または14に流れる電流を遮断し、電源電圧の低下を防ぐ。
(もっと読む)
モータ制御装置、および、これを用いた電動パワーステアリング装置
【課題】回転角検出手段を用いることなくモータを駆動し、このときのモータの巻線の異常を確実に検出できるモータ制御装置および電動パワーステアリング装置を提供する。
【解決手段】マイコン30は、第1駆動手段として機能し、トルクセンサ82により検出した操舵トルクに基づき加算角を演算し、当該演算により導出した加算角に基づきモータ10を制御する。マイコン30は、演算により導出した加算角に基づきモータ10を制御しているとき、第1異常検出手段として機能し、前記加算角、電流センサ81により検出した電流、および、インバータ部20に供給される第1制御信号(PWM制御信号)の値に基づき、モータ10の巻線の異常を検出する。
(もっと読む)
ブラシレスモータ制御装置、及びブラシレスモータ
【課題】ブラシレスモータのモータ電流値を安定して検出することができるブラシレスモータ制御装置及びブラシレスモータを提供する。
【解決手段】モータ16の各コイル30への通電期間の間の、それぞれのコイル30への通電を制御するFETをオンからオフに切り換えるべくPWM信号が異なるレベルに変化する際のエッジの所定時間前から当該エッジまでの時間を、当該オンからオフに切り換えるFETに接続されたコイル30に流れる電流の検出期間と特定する。
(もっと読む)
航空機搭載用モータ駆動制御装置及び航空機搭載用モータ駆動制御システム
【課題】制御性能の確保と発熱の抑制とを高い次元でバランスよく達成することができる、航空機搭載用モータ駆動制御装置を提供する。
【解決手段】インバータ23と、指令信号処理部25及びPWM周波数制御部29を有してパルス幅変調制御を行う制御器24とを備える。指令信号処理部25は、第1PWM周波数指令信号の受信時は、所定の一定周波数のPWM周波数にて非同期PWM制御が行われるよう高PWM周波数指令信号を出力する。第2PWM周波数指令信号の受信時は、上記よりも低い周波数にて非同期又は同期PWM制御が行われるように低PWM周波数指令信号を出力する。PWM周波数制御部29は、低PWM周波数指令信号の入力時は、モータ14が所定の回転速度未満のときに非同期PWM制御が行われ、モータ14が所定の回転速度以上のときに同期PWM制御が行われるようにPWM周波数を制御する。
(もっと読む)
電動モータ内蔵磁石の劣化検知方法及び装置
【課題】電動モータに内蔵される永久磁石の特性劣化を容易かつ確実に検知することができる電動モータ内蔵磁石の劣化検知方法及び装置を提供すること。
【解決手段】電動モータにおける永久磁石の劣化を検知するための電動モータ内蔵磁石の劣化検知方法であって、コイルに対して、回転子の永久磁石が形成する磁束の向きと同じ向きの磁束が生じるようにパルス電圧を印加し、コイルに流れる電流値のピーク値Ip+を測定する第1ピーク電流測定ステップS105、S106と、コイルに対して、回転子の永久磁石が形成する磁束の向きと逆向きの磁束が生じるようにパルス電圧を印加し、コイルに流れる電流値のピーク値Ip−を測定する第2ピーク電流測定ステップS108、S109と、ピーク値Ip+とピーク値Ip−との絶対値の差に基づいて永久磁石の劣化の有無を判定する判定ステップS110とを有する。
(もっと読む)
車両用電動機の制御装置
【課題】回転センサを用いることなく、コンパクトで安価、かつ信頼性の高い車両用電動機の制御装置を得る。
【解決手段】この発明による車両用電動機の制御装置は、駆動アームの上スイッチング素子により固定子巻線の1つの巻線端子に通電し下スイッチング素子により前記巻線端子とは異なる1つの巻線端子に通電し残りの巻線端子は上スイッチング素子と下スイッチング素子の何れからも通電されない第1の通電状態と、上スイッチング素子により固定子巻線の1つまたは2つの巻線端子に通電し下スイッチング素子により前記1つまたは2つの巻線端子以外の全ての巻線端子に通電する第2の通電状態とを、第1の通電状態にある第1の固定子巻線または第2の固定子巻線における前記残りの巻線端子の電圧に基づいて交互に切り替えるようにしたものである。
(もっと読む)
電動パワーステアリング装置
【課題】3相のうち2相の電流を検出する場合であっても、異常相を特定することが可能な電動パワーステアリング装置を提供する。
【解決手段】電動パワーステアリング装置では、q軸電圧が印加されているにも関わらず、q軸電流が第1閾値以下である基準電気角を算出し、前記基準電気角に基づいて異常相を判定する。
(もっと読む)
回転機の制御装置
【課題】出力電圧ベクトルのノルムを要求トルクに応じて一義的に定めるものにあっては、これに基づき永久磁石の磁束異常の有無を判断することが困難なこと。
【解決手段】ノルム設定部30では、要求トルクTrと電気角速度ωとに基づき、インバータIVの出力電圧ベクトルのノルムを設定する。位相設定部28では、推定トルクTeを要求トルクTrにフィードバック制御するための操作量として位相δを設定する。操作状態設定部38では、ノルム設定部30によって設定されたノルムVnと、位相設定部28によって設定された位相δとに基づき操作信号を生成してインバータIVに出力する。位相δの値に基づき、モータジェネレータ10の永久磁石の異常の有無を判断する。
(もっと読む)
モータ駆動制御装置
【課題】故障検出又は回路保護を効率的に実現する。
【解決手段】本モータ駆動制御装置は、スイッチングを行って電源からモータへ電力供給を行うための第1の信号を出力するスイッチング素子と、スイッチング素子のスイッチングを制御するための第2の信号を出力する駆動制御回路と、第1の信号の論理レベルと第2の信号の論理レベルとに矛盾が存在するか判断し、矛盾が存在している場合にはエラー信号を出力する判断部とを有する。
(もっと読む)
電動パワーステアリング装置
【課題】3相のうち2相の電流を検出する場合であっても、異常相を特定することが可能な電動パワーステアリング装置を提供する。
【解決手段】電動パワーステアリング装置10では、トルク軸電圧が印加されているにも関わらず、トルク軸電流が第1閾値以下の状態において、相間電圧がゼロボルト近傍になっている組合せの相以外の相を異常相として検出する。
(もっと読む)
モータ制御装置及びそれを用いた電動パワーステアリング装置
【課題】コンパクト化、軽量化及びコストダウンを図った上で電流検出可能となるDuty範囲を最大限とした、単一の電流センサで構成されるモータ制御装置、及びそれを用いた電動パワーステアリング装置を提供する。
【解決手段】制御演算によりモータの電流を制御するための各相Duty指令値を算出し、各相Duty指令値に応じたPWM波形を形成し、PWM波形に基づいてインバータによりモータを駆動するモータ制御装置において、インバータの電源入力側又は電源出力側に単一の電流検出器を接続し、各相Duty指令値の差を保持したまま一律増減させるDutyシフト機能と、各相PWM信号の出力位置を決定するPWM出力位置変更機能を備え、1相のみ、又は2相同時に、PWM信号がONとなるタイミングをPWM周期の固定位置に発生させ、モータ電流を検出する。
(もっと読む)
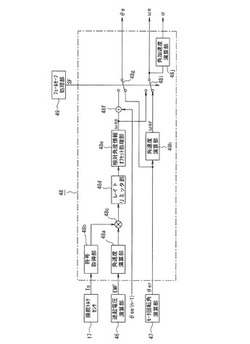
モータ制御装置
【課題】バッテリなど一定電力を供給する車両のシステムにおいて、モータに過大な電流供給があった場合、モータ電流指令値に制限をかけるとモータ電流の制限に遅れが発生し、電流制御の応答性に課題があった。
【解決手段】モータ1に与える電流指令値とモータ電流とに基づいてモータを駆動するためのモータ電圧指令値を算出するモータ電圧指令値演算手段12と、モータに供給する電源電圧を検出する電源電圧検出手段7と、電源電圧とモータ回転速度から、U相、V相、W相の各相モータ電圧指令値を制限する相電圧指令制限値を算出するモータ電圧指令制限値算出手段13と、相電圧指令制限値によって、モータ電圧指令値を制限するモータ電圧指令値制限手段14とを備え、モータ電圧指令値に制限をかけることにより電流制御の応答性を早めた。
(もっと読む)
電動工具
【課題】
モータのコイルを複数組準備し、これらを効率よく切り替えながらモータを制御する電動工具を提供する。
【解決手段】
永久磁石を有する回転子と、複数のティースを有する固定子4を有するモータにより先端工具を駆動する電動工具であって、ティース44−1〜6に巻数の異なる第1のコイル(61−1〜6)と第2のコイル(62−1〜6)を設け、モータの制御部は、トリガスイッチの引き量に応じて第1のコイルと第2のコイルへ駆動電圧の供給を選択して制御する。第1のコイルは第2のコイルの内周側に巻かれ、第2のコイルは第1のコイルよりも巻数が少ないようにし、トリガスイッチの引き量が小さいときは第1のコイルだけに駆動電圧を供給する。トリガスイッチの引き量が大きくなったら第2のコイルだけに駆動電圧を供給する。
(もっと読む)
モータ制御装置及び乗り物
【課題】弱め磁束制御の実行時に発生しうるトルク誤差を低減する。
【解決手段】モータ制御装置3は、dmqm座標系をγδ座標系として推定し、モータ1への供給電流を磁束発生に関与するγ軸電流iγ及びトルク発生に関与するδ軸電流iδに分解してベクトル制御を行う。dmqm座標系を形成するqm軸は、最大トルク制御の実現時における出力電流ベクトルの向きと向きが一致する回転軸であり、dm軸はqm軸に直交する。弱め磁束制御の実行時において、磁束制御部17は負のγ軸電流指令値iγ*を出力し、補正量算出部21はγ軸電流値iγに基づき補正量Δiδ*を算出する。トルク指令値Trq*に基づくδ軸電流指令値iδ*に補正量Δiδ*を加算することによって、負のγ軸電流を供給したことによって発生しうるトルク誤差を低減する。
(もっと読む)
電動機駆動装置
【課題】インバータをスイッチング制御する際のノイズの発生の低減と素子の温度上昇の抑制とを両立させる。
【解決手段】インバータのPWM制御に用いるキャリアの周波数(キャリア周波数F)を、モータの電気角θeが電気角周期Tの1/4周期進む度に(ステップS120)、高周波数範囲内からランダムに抽出した高周波数の設定と低周波数範囲内からランダムに抽出した低周波数の設定とに交互に切り替える(ステップS150〜S170)。これにより、モータMGの電気信号(変調波)の山や谷(T/2周期)に対して高周波数の設定期間と低周波数の設定期間とを同期間割り当てることができ、特定のトランジスタに対して熱集中が生じるのを抑制することができる。また、キャリア周波数Fを拡散させるから、ノイズの発生を低減することができる。
(もっと読む)
回転電機制御装置
【課題】2相変調によりインバータをスイッチング制御する際にも安定した3相交流が励起されるように、2相変調パルスを生成する。
【解決手段】3相の内の少なくとも1相を所定の固定期間TFの間ハイ状態又はロー状態に固定して、他相を変調する2相変調によりインバータをスイッチング制御する2相変調パルスSPを生成する2相変調パルス生成部は、固定期間TFを回転電機の回転に同期させて固定パルスを生成すると共に、固定期間TF以外の期間TMではパルス幅変調により変調パルスを生成する。
(もっと読む)
モータ制御装置及び乗り物
【課題】弱め磁束制御の実行時に発生しうるトルク誤差を低減する。
【解決手段】軸誤差推定部は、dq座標系と異なる制御座標系との位相差である軸誤差を推定する。qm軸は、最大トルク制御の実現時における出力電流ベクトルの向きと向きが一致する回転軸である。弱め磁束制御の実行時において、モータの出力電流ベクトルがトルク指令値に従った定トルク曲線311に沿うように、弱め磁束用の電流に応じて軸誤差の目標値θtを設定する。軸誤差を目標値θtに一致させるPLLを形成することで、モータの出力電流ベクトルV323の終点は定トルク曲線311上にのる(即ち、出力トルク及びトルク指令値間のトルク誤差がゼロになる)。
(もっと読む)
81 - 100 / 747
[ Back to top ]