
Fターム[5H560SS02]の内容
無整流子電動機の制御 (40,007) | 電源回路 (1,741) | 直流電源 (1,289) | 電池、バッテリ (747)
Fターム[5H560SS02]に分類される特許
101 - 120 / 747
モータ駆動装置、及び、これを用いた電動パワーステアリング装置
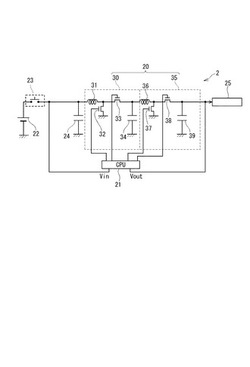
【課題】 高電力の出力が要求される場合に昇圧電圧の低下を防ぐモータ駆動装置を提供する。
【解決手段】 モータ駆動装置2の昇圧回路20は、サブ昇圧回路30とサブ昇圧回路35とが直列に接続される。サブ昇圧回路30は、昇圧コイル31、昇圧用スイッチング素子32、降圧用スイッチング素子33、出力用コンデンサ34を備え、バッテリ電圧Vinを昇圧してサブ昇圧回路35に出力する。サブ昇圧回路35は、サブ昇圧回路30と同様の構成であり、サブ昇圧回路30が昇圧した電圧をさらに昇圧して昇圧電圧Voutをモータ駆動回路25に出力する。これにより、昇圧回路20全体の昇圧比は、2つのサブ昇圧回路30、35のサブ昇圧比を掛け合わせた値となり、十分に高い昇圧電圧Voutを発生することができる。よって、高電力要求時の昇圧電圧の低下を防ぐことができる。
(もっと読む)
インバータ制御装置および車両

【課題】変調率が閾値以下の正弦波領域と、変調率が閾値を超える過変調領域とが切り替わっても、電圧指令と出力電圧1次成分とを線形に維持できるようにする。
【解決手段】インバータ制御装置60は、インバータ20に対して電圧制御信号Vcを出力する電圧変換制御部66aと、電圧変換制御部66aが出力する電圧制御信号Vcの変調率が閾値を超えると、変調率,同期数k,位相等のような電圧制御信号Vcを制御する変数のうちで二以上の変数を引数とする補正用マップを用いて、電圧指令と出力電圧とが線形となるように補正する電圧振幅補正部65a(線形補正部)とを有する。変調率が閾値以下の正弦波制御も当然に線形にできるので、正弦波制御と過変調制御との間における制御モードの切り替えをシームレスに行うことができる。すなわち、電圧指令と出力電圧1次成分とを線形に維持することができる。
(もっと読む)
回転機の制御装置
【課題】検出される回転角度θを補正する補正値Δθの正常値を利用して制御を行うことができなくなることで、トルクフィードバック制御部20による制御が破綻する懸念があること。
【解決手段】推定トルクTeを要求トルクTrにフィードバック制御するための操作量としての位相δと、電気角速度ωおよび要求トルクTrに応じて開ループ制御によって定まるノルムVnと、回転角度θの検出値に基づき、操作信号生成部25では、インバータの操作信号を生成する。ここで、回転角度θとしては、上記補正値Δθによって補正されたものが用いられる。ただし、補正値Δθを利用不可能となる場合、電流フィードバック制御部30による制御に切り替える。
(もっと読む)
パワーステアリング装置
【課題】アイドルストップ機能を有する自動車に搭載されるパワーステアリング装置において、電動モータが発電状態となったときに発生する起電力から電動モータ駆動用のインバータを保護しつつ、アイドルストップ中の消費電力を低減する。
【解決手段】アイドルストップ中であるか否かを判定するアイドルストップ状態判定手段(ステップS106,107)と、上記電動モータが発電状態にあるか否かを判定する発電状態判定手段(ステップS102)と、を設け、アイドルストップ状態判定手段がアイドルストップ中でないと判定している場合、少なくとも上記電動モータが発電状態にあると上記発電状態判定手段が判定しているときに弱め界磁制御を行う一方、上記アイドルストップ状態判定手段がエンジンの自動停止中であると判定している場合には弱め界磁制御を停止する。
(もっと読む)
回転電機制御装置
【課題】高周波の観測電流に対する比例積分制御の追従性を向上させて電圧指令値からロータの磁極位置を良好に推定する。
【解決手段】電流指令と回転電機からのフィードバック電流id,iqとのdq軸ベクトル空間における偏差Δid,Δiqの少なくとも基本波成分をdq軸ベクトル空間において比例積分制御して基本電圧指令vd0*,vq0*を求め、偏差Δid,Δiqをdq軸ベクトル空間から高周波ベクトル空間に座標変換して比例積分制御し、dq軸ベクトル空間に再変換して高周波成分電圧指令vdh*,vqh*を求め、基本電圧指令vd0*,vq0*と高周波成分電圧指令vdh*,vqh*とを加算して決定されたdq軸ベクトル空間における電圧指令vd*,vq*に含まれる高周波成分に基づいてロータの磁極位置θ^mを演算する。
(もっと読む)
車両のモータ制御装置
【課題】交流モータを駆動する3相電圧型のインバータの1つのスイッチング素子の短絡故障が発生した場合でも、交流モータのトルクを制御できるようにする。
【解決手段】インバータ19の各相のスイッチング素子35〜40のうちの1つのスイッチング素子の短絡故障が発生したときに、短絡故障の発生時に使用可能な有効電圧ベクトルに対応する電気角区間(2相変調可能な電気角区間)では、短絡故障が発生した相以外の残りの2相のスイッチング素子のオン/オフを制御する2相変調で電圧制御して交流モータ12のトルクを制御するようにインバータ19を制御し、2相変調可能な電気角区間以外の電気角区間(1相変調可能な電気角区間)では、短絡故障が発生した相以外の残りの2相のうちのいずれか1相のスイッチング素子のオン/オフを制御する1相変調で電圧制御するようにインバータ19を制御する「2相及び1相変調制御」を実行する。
(もっと読む)
電動車両用制御装置
【課題】力行状態と回生状態とが切り替わる零クロス時において、各走行モードに応じた電動機の制御が可能な電動車両用制御装置を提供する。
【解決手段】電動車両10用の制御装置34では、電動機12の目標駆動力について、回生側の零近傍値である第1零クロス閾値と、力行側の零近傍値である第2零クロス閾値とを設定し、第1零クロス閾値と第2零クロス閾値との間の零クロス域70の幅を、電動車両10の出力応答性を優先する第1走行モードのときよりも、電費を優先する第2走行モードのときに広くする。また、電動機12の駆動力の変化を、目標駆動力が零クロス域70外であるときよりも、前記目標駆動力が零クロス域70内にあるときに緩やかにして電動機12を制御する。
(もっと読む)
可変磁束ドライブシステム
【課題】可変磁石であることによるトルク精度の劣化の抑制や磁化処理に伴う過渡トルクの抑制を図り、システム全体の効率を向上し広い速度範囲に対応できる可変磁束ドライブシステムを提供することである。
【解決手段】磁化要求生成部29は、インバータの変調率に応じて可変磁石を磁化させる要求を可変磁束制御部13に対して発生し、可変磁束制御部13は、その磁化要求を入力すると、インバータ1からの磁化電流によって磁束を可変させて可変磁石を磁化させる。切替器37は、トルク指令生成部38からのトルク指令に基づくDQ軸電流基準と可変磁束制御部13からのDQ軸磁化電流指令とを切り替え、ゲート指令生成部15は、切替器37からのトルク指令に基づくDQ軸電流基準またはDQ軸磁化電流指令に基づいてインバータ1を制御するためのゲート指令を生成する。
(もっと読む)
モータ制御システム
【課題】モータ制御システムにおいて、矩形波制御方式からPWM制御方式への切替えを適時に行ってモータ過電流の発生を抑制する。
【解決手段】モータ制御システムは、バッテリ電圧をコンバータ35で必要に応じて昇圧してインバータ38に供給し、交流モータ14の運転条件に応じて、インバータ38の制御方式を矩形波制御、過変調PWM制御、正弦波PWM制御の間で選択的に設定する制御装置を備える。制御装置は、モータ電流の電流位相をdq平面上における閾値ラインと比較して矩形波制御方式からPWM制御方式への切り替えを行う制御方式切替部と、矩形波制御方式の実行中で且つインバータ入力電圧であるシステム電圧VHが所定閾値Vthrよりも小さいときにdq平面上における閾値ラインを進角側または低q軸電流側に変更する閾値変更部とを含む。
(もっと読む)
回転機の制御装置
【課題】PWM制御を行う場合、スイッチング素子のスイッチング状態の切替回数が多くなり、スイッチング状態の切り替えに伴う損失が問題となりやすいこと。
【解決手段】位相設定部32では、推定トルクTeを要求トルクTrにフィードバック制御するための操作量として位相δを算出する。一方、ノルム設定部33では、要求トルクTrおよび電気角速度ωを入力としてノルムVnを設定する。そして、デッドタイム算出部34では、電源電圧VDCとノルムVnとに基づき、矩形波制御におけるデッドタイムDTを電気角度間隔として算出する。位相補正部35では、位相設定部32による位相δを「DT/2」によって補正する。矩形波信号生成部36では、補正された位相δとデッドタイムDTと回転角度θとに基づき、操作信号g*#(*=u,v,w;#=p,n)を生成する。
(もっと読む)
回転機の制御装置
【課題】永久磁石を備えるモータジェネレータ10の減磁の有無を判断するための処理手段を適合するに際し、その工数が多くなること。
【解決手段】モータジェネレータ10は、クラッチC1を介して駆動輪14に機械的に連結されて且つクラッチC2を介してエンジン16に機械的に連結されている。車両の起動スイッチがオンされた直後、クラッチC1,C2を解除した状態において、電流フィードバック制御によってモータジェネレータ10のトルクを制御し、この際の実際のトルクが要求トルクを下回ることに基づき、永久磁石の磁束が減少したと判断する。
(もっと読む)
モータ駆動制御システムの制御装置およびそれを搭載する車両
【課題】モータ駆動制御システムにおいて、矩形波制御からPWM制御への切換えの際に、制御モードの切換え遅れに起因して発生する電流乱れを抑制する。
【解決手段】モータ駆動制御システム100を制御するECU300は、矩形波制御モードおよびPWM制御モードのいずれかによってインバータ140を制御して交流電動機200を駆動する。ECU300は、制御モード選択部330と、交流電動機200のモータ電流をA/D変換するA/D変換部340とを備える。A/D変換部340は、矩形波制御モードの場合に、交流電動機200の回転速度が急激に低下したときは、交流電動機200の電気角に基づく実行周期よりも速い実行周期に従って動作する。制御モード選択部330は、矩形波制御モードの場合に、モータ電流の電流乱れが発生したことに応じて、矩形波制御モードからPWM制御モードへ切換える。
(もっと読む)
電力変換装置
【課題】過変調制御が行われる場合において、信号伝達経路等の異常診断頻度の低下を回避するためのスイッチング素子の操作信号を適切に生成することのできる電力変換装置を提供する。
【解決手段】第2セレクタSL2から出力されるスイッチング素子Sjkの操作信号gjkの立ち下がりを入力とし、駆動回路DUから出力される駆動信号djkの変化に基づき、第2セレクタSL2からスイッチング素子Sjkまでの信号伝達経路に異常が生じていないか否かを診断する構成において、過変調制御又は矩形波制御によってモータジェネレータの制御が行われる場合、第2セレクタSLから操作信号gjkとしてオン操作信号が出力される期間に、出力されるオン操作信号をオフ操作信号に強制的に変更する。
(もっと読む)
ブラシレスモータ駆動回路
【課題】 電池電圧が低下しても駆動を継続することができるものとする。
【解決手段】 制御部3が駆動回路を介して複数のFETからなるブリッジ回路2をスイッチングしてモータ回転させるものである。NチャネルFETを駆動素子とするブリッジ回路の上段側FETにゲート電圧を印加するフローティング電圧発生部5と、上記電池から電源が供給されるコンバータ11とを備える。FETのゲートへの電源供給専用として設けた上記コンバータは、ブリッジ回路の上段側に対しフローティング電圧発生部の入力部に出力を接続し、ブリッジ回路の下段側に対し上記駆動回路の入力部に出力を接続している。上記制御部はコンバータを介することなく上記電池から電源が供給される。
(もっと読む)
直流回生電動機
【課題】出力効率を高め、かつ給電停止直後の回生制動を、給電操作手段の操作で簡易に行うことや、回生制動で得られた電力を、蓄電器や二次電池に効率的に蓄電してエネルギー効率を高めることが可能な直流回生電動機を提供する。
【解決手段】回転子と、固定子と、指令信号を出力する指令信号生成手段と、給電信号を出力する給電信号生成手段と、回転子の磁極を検出する検出手段と、界磁巻線対それぞれに供給される負荷電流の方向を切換える切換手段と、回生信号を出力する回生信号生成手段と、界磁巻線対に誘起される交流電力を蓄電する回生電力制御手段とを備え、指令信号生成手段は、受けた力の大きさが所定の閾値を越えた場合は、該閾値を越える力の大きさに比例してデューティ比が変化する第一指令信号を生成し、受けた力の大きさが該閾値以下の場合は、該閾値を下回る力の大きさに反比例してデューティ比が変化する第二指令信号を生成する。
(もっと読む)
電動パワーステアリング装置
【課題】
モータを駆動する各相電流指令値のゼロクロス時においても、モータからの異音の発生することがなく、且つ操舵フィーリングの良い電動パワーステアリング装置を提供すること。
【解決手段】
回転角補正演算手段は、モータの回転角が所定範囲内にあり、モータの回転角が所定範囲内で増加している場合には、モータの回転角を、モータの回転角の所定範囲内の最大値に固定し、モータの回転角が所定範囲内で減少している場合には、モータの回転角を、モータの回転角の所定範囲内の最小値に固定する。
(もっと読む)
車両用回転電機の駆動制御装置
【課題】車両が停車又は低速走行しているときにおいて、特に過変調電流制御のキャリアに起因する騒音を十分に低減することが可能な車両用回転電機の駆動制御装置を提供することである。
【解決手段】駆動制御装置20は、キャリアに起因する騒音を低減する騒音抑制制御部30として、車速が予め定められた所定速度以下であるか否かを判定する車速判定モジュール31と、動作点が過変調電流制御領域内および特定実施領域内であるか否かを判定する動作点判定モジュール32と、車速が所定速度以下であり且つ動作点が過変調電流制御領域内および特定実施領域内であると判定されたときに、弱め界磁電流を流して動作点を特定実施領域外の正弦波電流制御領域にシフトさせる弱め界磁制御モジュール33と、キャリア周波数変更モジュール34とを有する。
(もっと読む)
電動車両駆動用モータの出力制御装置および出力制御方法
【課題】ロータセンサの取り付け誤差を検出して、センサ信号を補正し、補正されたセンサ信号に基づいてモータのステータコイルに対する通電制御の精度を向上させる。
【解決手段】ブラシレスモータ(1)に設けられるロータセンサ(5)のセンサ信号に基づいてモータの通電タイミングを制御する。モータ(1)を回生駆動させ、このときに生じる誘起電圧のゼロクロス点を検出するとともに、センサ信号の立ち上がりを検出する。ゼロクロス点に対するセンサ信号の立ち上がり位置の位相ずれを各ロータセンサに関して検出し、検出された位相ずれの平均値を算出する。記憶されている位相ずれの平均値を利用してセンサ信号の立ち上がり位置を補正し、補正されたセンサ信号に基づいてモータ(1)に対する通電タイミングを制御する。位相ずれの検出と記憶は完成車検査工程で行われる。
(もっと読む)
ブラシレスモータ制御装置及びブラシレスモータシステム
【課題】ブラシレスモータが停止したにも拘わらず、あたかもブラシレスモータが駆動しているように誤った認識をして、所望の制御が得られなくなることを防止できるブラシレスモータ制御装置及びブラシレスモータシステムを提供することにある。
【解決手段】ブラシレスモータ制御手段302は、上位制御装置12からの制御指令に応じて、ブラシレスモータ4に印加する電圧指令を演算する。軸誤差演算手段306は、ブラシレスモータ制御手段302が出力する電圧指令と、座標変換手段303により求められた電流値と、ブラシレスモータの制御上の回転速度を用いて、回転座標軸であるd−q軸とdc−qc軸との軸誤差を推定演算する。異常検出手段308は、軸誤差演算手段306により求められた軸誤差に基づいて、ブラシレスモータを異常と判定する。
(もっと読む)
モータ制御装置、モータ制御システム、モータ制御プログラム
【課題】運転モードに応じてモータの駆動を高効率で制御可能なモータ制御装置を提供する。
【解決手段】電流指令ベクトルの向きに応じた抑制電流成分によって抑制された後の誘起電圧を電圧検出部で検出される電源電圧Vbatよりも小さくする方向に抑制する第1電流指令ベクトルAvを決定する第1電流指令ベクトル決定部2aと、実測値に基づき予め記憶させている効率情報において回転数検出部で検出した回転数と外部から指示されたトルク指令Trefとに関連付けられた第2電流指令ベクトルAbaseを決定する第2電流指令ベクトル決定部2bとを備え、トルク出力優先モード時は第1電流指令ベクトルAvでモータの駆動を制御し、効率優先モード時は第2電流指令ベクトルAbaseでモータの駆動を制御するように構成した。
(もっと読む)
101 - 120 / 747
[ Back to top ]