
Fターム[5H560SS02]の内容
無整流子電動機の制御 (40,007) | 電源回路 (1,741) | 直流電源 (1,289) | 電池、バッテリ (747)
Fターム[5H560SS02]に分類される特許
61 - 80 / 747
回転機の制御装置およびその製造方法
【課題】電動機10の相電流を基本波とすべくインバータINVの出力電圧をフィードフォワード補正したのでは、電動機10のステータの巻線を鎖交する磁束が基本波からずれる場合には、トルク脈動を低減できないこと。
【解決手段】相殺電磁力出力部44は、鎖交磁束の基本波からのずれに起因した電磁力の歪を相殺する相殺電磁力についての、接線方向の相殺電磁力Fnθと、法線方向の相殺電磁力FnRと、軸線方向の相殺電磁力FnTとを各別に出力する。歪補正部36,38,40のそれぞれでは、これら相殺電磁力に応じた電圧を、制御量の制御のための操作量(指令電圧vur,vvr,vwr)に重畳する。
(もっと読む)
駆動装置

【課題】電動機を駆動するためのインバータの制御モードを矩形波制御モードから正弦波制御モードに切り替える際の電動機の出力トルクの変動を抑制する。
【解決手段】駆動電圧系の電圧VHの上昇を伴って矩形波制御モードから正弦波制御モードに切り替えるときには、矩形波制御モードから過変調制御モードに切り替えて(S200)、電流指令Id*,Iq*を保持してインバータを制御すると共に電圧VHが切替目標電圧VHchまで上昇するよう昇圧コンバータを制御し(S210〜S230)、電圧VHが保持されるよう昇圧コンバータを制御すると共に電流指令Id*,Iq*を切替目標電流Idch,Iqchに向けて等トルクライン上を移動させながらインバータを制御し(S240〜S260)、過変調制御モードから正弦波制御モードに切り替える(S270)。
(もっと読む)
回転機の制御装置
【課題】高周波電圧信号を小さくすると、電気角の推定精度が低下すること。
【解決手段】高周波電圧信号設定部50では、高周波電圧指令信号を設定する。操作信号生成部32では、これに基づきインバータの操作信号g*#(*=u,v,w;#=n,p)を設定する。一方、ハイパスフィルタ62は、モータジェネレータを流れる電流id,iqから高周波電流信号idh,iqhを抽出する。外積演算部64は、高周波電圧指令信号と高周波電流信号との外積値を算出する。これがゼロとなるように回転角度θが操作される。ハイパスフィルタ64の入力は、相電流iu,iv,iwの検出値のうち絶対値が大きいもののみを用いて生成される。
(もっと読む)
回転電機の制御装置
【課題】良好な制御性を維持しながら、電磁騒音の抑制とスイッチングによる発熱の抑制とをより高度に両立することが可能な回転電機の制御装置を提供することである。
【解決手段】制御装置20は、複数のスイッチング素子を含むインバータ13を用いて、モータ11に印加する電圧を制御する。制御装置20は、電圧指令とキャリアとの比較に基づいて、スイッチング素子のスイッチング制御信号を生成するPWM信号生成部24と、予め定められた同期数と、モータ11の回転数とに基づいて、キャリアの基準周波数fcを設定するキャリア制御部27とを備え、キャリア制御部27は、電流指令に基づいて、キャリアの周波数を、基準周波数を整数倍した高周波数の乗算周波数に切り換える一方、同じスイッチング素子に対応する高電流位相領域について、連続して乗算周波数に切り換えない。
(もっと読む)
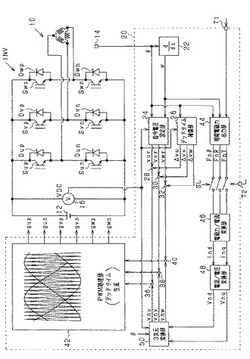
回転機の制御装置
【課題】半波整流を行なう際に中性点の電位を操作したのでは、各相の巻線が有効利用されているとはいい難いこと。
【解決手段】スイッチング素子Sup、Svp,Swnがオンとなる場合、スイッチング素子Snnがオン且つスイッチング素子Snpがオフとされる。ここで、スイッチング素子Snp,Snnの操作がなされないなら、スイッチング素子Sup、Svp,Swnがオンとなることで、固定子巻線の接続点の電位(中性点電位)は、「VDC/2」よりも高くなる。これに対し、スイッチング素子Snnをオンとすると、中性点電位は、「0」となる。このため、スイッチング素子Sup,Svpに流れる電流が増大し、ひいてはモータジェネレータ10に流れる電流が増大することで、スイッチング素子Snnによって中性点電位を操作しない場合と比較して、モータジェネレータのトルクが大きくなる。
(もっと読む)
モータ制御装置
【課題】起動モードにおいて負荷の変動に追従した回転制御を実行するモータ制御装置を提案する。
【解決手段】この提案のモータ制御装置は、相電流Iu〜Iwに基づいて電流波高値Ip及び電流電気角θiを検出する検出手段4と、相電流Iu〜Iwと印加電圧Vu〜Vwとに基づいて誘起電圧波高値Ep及び誘起電圧電気角θeを検出する検出手段5と、θm=θi−β−90°又はθm=θe−γ−90°を使用してロータ位置θmを検出するロータ位置検出手段6と、そのθmに基づいて回転速度ωを検出する速度変動検出手段15と、起動用電圧指示値Vp及び起動用電圧位相指示値θvを出力し、同期モータMの回転速度を所定の加速度で上昇させると共に、速度変動検出手段15で検出される回転速度ωをθvに反映させる起動手段10と、を備える。
(もっと読む)
モータ制御装置
【課題】過渡時におけるロータ位置の検出精度を向上させる。
【解決手段】同期モータ12のロータ位置をセンサレスで検出する機能を備えたモータ制御装置10であって、誘起電圧波高値Ep、電流電気角θiから誘起電圧電気角θeを減じた減算値(θe−θi)の2つのパラメータで規定される電流位相βを予め記憶する位相記憶部と、これに記憶されたβを参照することにより、電流極座標変換部26で検出されたθi、並びに、誘起電圧極座標変換部28で検出されたEp及びθeに基づいて、βを選定する位相選定部と、このβを第1の変数とし前記検出されたθiを第2の変数とするロータ計算式からロータ位置θmを算出するロータ位置演算部と、を含むロータ位置検出部30を備えて成る。そして、位相選定部においてβを選定するときに、前記検出されたEp及びθeを、コイルに流れる電流の変化に応じて補正する補正部32を更に備えたものである。
(もっと読む)
モータ駆動装置
【課題】モータ駆動用の電源に異常が起きた場合であっても、モータを良好に駆動し続けることが可能なモータ駆動装置を実現する。
【解決手段】モータ駆動装置において、モータのコアに第1巻線と第2巻線とが巻回され、第1巻線及び第2巻線のうち、第1巻線のみに電流が流れるように第1巻線と接続している第1電源と、第1巻線及び第2巻線のうち、第2巻線のみに電流が流れるように第2巻線と接続している第2電源と、第1電源及び第2電源のうち、モータを駆動するために使用する電源を選択する選択部と、を有する。選択部は、第1電源が正常であるときには、第1電源からの電流が第1巻線に流れるように、第1電源が異常であるときには、第2電源からの電流が第2巻線に流れるように、モータを駆動するために使用する電源を選択する。
(もっと読む)
モータ駆動装置及びこれを用いたモータ装置
【課題】電力効率の低下やS/Nの低下を招かずにロータ位置検出信号の自動利得制御を行うことが可能なモータ駆動装置、及び、これを用いたモータ装置を提供する。
【解決手段】本発明に係るモータ駆動装置1は、ロータ位置検出信号(ホール電圧信号HU+/HU−、HV+/HV−、HW+/HW−)が伝達される信号経路上に自動利得制御回路20を備えており、自動利得制御回路20は、入力信号(進角ホール電流信号AU+/AU−、AV+/AV−、AW+/AW−)を差動増幅して出力信号(増幅ホール電流信号IU、IV、IW)を生成するアンプ21と、前記出力信号(モニタ電流信号IUm、IVm、IWm)を監視してアンプ21の利得を決定する帰還制御部23と、を含む。
(もっと読む)
電動パワーステアリング装置および設定方法
【課題】トルク計などの計測器を用いることなく、装置全体での製造ばらつきなどを考慮して左右の操舵特性をバランスさせることができる技術を提供する。
【解決手段】同軸的に配置された2つの回転軸の相対回転角度に応じた電気信号を出力する相対角度検出装置と、2つの回転軸のいずれか一方の回転軸に駆動力を付与する電動モータと、相対角度検出装置からの出力値と記憶領域に記憶された補正値とに基づいて操舵トルクを検出するトルク検出部と、補正値を設定する中立補正値設定部と、を備え、中立補正値設定部は、電動モータが右方向に予め定められた所定回転速度で回転したときの相対角度検出装置からの出力値である右側出力値と、電動モータが左方向に所定回転速度で回転したときの相対角度検出装置からの出力値である左側出力値とに基づいて補正値を設定する。
(もっと読む)
ブラシレスモータの駆動制御装置
【課題】ブラシレスモータの誘起電圧にノイズが重畳していても、そのノイズの影響を排除することができ、ブラシレスモータの回転変動を抑制することができるブラシレスモータの駆動制御装置を提供する。
【解決手段】通電相切り替えタイマ1aは、ブラシレスモータ100の通電相の各相の誘起電圧が基準電圧未満となる度に、第1カウント値でセットされる。通電相歯止めタイマ1bは、ブラシレスモータ100の下流側の通電相が切り替えられたことに応じて、第2カウント値でセットされる。制御装置1は、通電相切り替えタイマ1a及び通電相歯止めタイマ1bのうちのいずれか一方のタイマがカウントダウンを終了したことに応じて、ブラシレスモータ100の通電相を切り替える。
(もっと読む)
電動パワーステアリング装置および禁止方法
【課題】モータの回転角度を正確に検出することができない状態でモータにより操舵補助力が与えられることを抑制する技術を提供する。
【解決手段】ステアリングホイールに操舵補助力を与える電動モータと、電動モータの回転角度に応じた信号を出力するレゾルバと、レゾルバからの出力値に基づいて電動モータの回転角度を算出するモータ角度算出部と、モータ角度算出部が算出した算出回転角度に基づいて電動モータへの目標電流を設定し、電動モータの駆動を制御する制御装置と、を備え、制御装置は、起動時に、電動モータの実際の回転角度と、レゾルバからの出力値が示す回転角度とが所定の位相差とならない異常が発生しているか否かを診断し、異常が発生している場合には電動モータの駆動を禁止する。
(もっと読む)
電動工具
【課題】 力率改善回路を備えずに力率を改善することのできる電動工具を提供する。
【解決手段】 電動工具1は、複数の固定子巻線U、V、Wを有し、電圧が印加された場合に所定の誘起起電圧が発生するブラシレスモータ5と、交流電圧を整流する整流回路10と、整流された交流電圧を、誘起起電圧よりも小さな最小値を有する脈動電圧に平滑する平滑コンデンサ11と、スイッチング動作を行うことにより脈動電圧を固定子巻線U、V、Wに順次出力するインバータ回路8と、を備えたことを特徴としている。
(もっと読む)
モータ制御装置
【課題】ブラシレスモータの始動時における立ち上がりの応答性を向上させる。
【解決手段】制御ユニットにてモータの停止指令が伝達されると(S121)、S122にて今回の停止指令が通常の停止指令であるか否かを判定する。通常の停止指令である場合にはS125にて通常停止制御を実行する。通常停止制御では、目標モータ回転数を停止指令伝達時の値から徐々に減少させることにより回転数制御を継続しつつモータの実回転数Nを徐々に低下させる。S126では、モータの実回転数Nと所定回転数Ns(例えば0rpm付近の値)とを比較し、N≦Nsか否かを判定する。N≦Nsとなった時点でS127に進み、ロータ位置決め処理を行う。ロータ位置決め処理では、例えば、特定の相巻線に通電してロータをわずかに回転させることにより、ロータ磁極位置を予め定めた位置まで移動させる。
(もっと読む)
回転機の制御装置
【課題】d軸方向に高周波電圧信号を重畳し、これに伴ってモータジェネレータ10を流れる高周波電流に基づき回転角度θを推定する方式の場合、回転角度θの推定に際してノイズが生じること。
【解決手段】角度推定部40では、拡張誘起電圧に基づき回転角度を推定する。ここで、モータジェネレータ10に印加される電圧の高周波成分は、インバータIVの現在の操作状態を表現する電圧ベクトルViから指令電圧vdr,vqrを減算したものとなる。これに伴ってモータジェネレータ10を流れる電流に生じるリプルに基づき、拡張誘起電圧におけるq軸電流の微分値に比例する量を算出することで、回転角度θを推定する。
(もっと読む)
回転機の制御装置
【課題】高周波電圧信号を小さくすると、電気角の推定精度が低下すること。
【解決手段】高周波電圧信号設定部50では、高周波電圧指令信号を設定する。操作信号生成部32では、これに基づきインバータの操作信号g*#(*=u,v,w;#=n,p)を設定する。一方、ハイパスフィルタ58は、モータジェネレータを流れる電流id,iqから高周波電流信号idh,iqhを抽出する。外積演算部60は、実際に重畳される高周波電圧指令信号と高周波電流信号との外積値を算出する。外積値とその目標値との差がゼロとなるように回転角度θが操作される。相電流がゼロクロスする期間を短縮すべく、指令電流変更部21では、指令電流idr,iqrの位相を操作する。
(もっと読む)
回転機の制御装置
【課題】高周波電圧信号を小さくすると、電気角の推定精度が低下すること。
【解決手段】高周波電圧信号設定部50では、高周波電圧指令信号を設定する。操作信号生成部22では、これに基づきインバータの操作信号g*#(*=u,v,w;#=n,p)を設定する。一方、ハイパスフィルタ58は、モータジェネレータを流れる電流id,iqから高周波電流信号idh,iqhを抽出する。外積演算部60は、高周波電圧指令信号と高周波電流信号との外積値を算出する。これがゼロとなるように回転角度θが操作される。高周波電圧指令信号と指令電流とが直交する設定を採用する。
(もっと読む)
電気機械装置、移動体、及びロボット
【課題】電気機械装置の回生動作においてを滑らかに動作させる。
【解決手段】電気機械装置10であって、電磁コイル100u〜wを有する第1の駆動部材15と、前記第1の駆動部材15に対して相対的に移動可能な第2の駆動部材20と、前記電磁コイル100u〜wを駆動するとともに、前記第2の駆動部材20の減速時に前記電磁コイル100u〜wからのエネルギーの回生を行う制御部405と、を備え、前記制御部405は、前記電磁コイル100u〜wに生じる誘起電圧のゼロクロス点を中心とした第1の回生区間を設定して回生を実行する第1の回生モードを有する。
(もっと読む)
モータ制御装置
【課題】初期化処理の回数を抑制する。
【解決手段】伝達機構3は、パーキング位置と、非パーキング位置とに切換えられるマニュアルレバー3aを有する。マニュアルレバー3aは、SR型のモータ12によって駆動される。モータ12の回転位置は、エンコーダ13によって検出される。制御装置11は、エンコーダ13からの信号を計数することによりロータの位置を示すカウント値Nを算出する。制御装置11は、スリープ状態に移行する前に、エンコーダ13の信号を記憶する。さらに、制御装置11は、スリープ状態にある期間中に、エンコーダ13の信号の変化を検出する手段を備える。制御装置11は、スリープ状態にある期間中にエンコーダ13の信号が変化すると、信号の変化方向に応じて、カウント値Nを+1、または−1だけ補正する。この結果、スリープ状態から再起動されたときの初期化処理が回避される。
(もっと読む)
モータ制御装置
【課題】永久磁石同期モータのセンサレス制御の安定性を向上することができるモータ制御装置を提供する。
【解決手段】相電圧設定手段は、モータ及びインバータの少なくとも何れか一方の器差を有するパラメータに基づいた電流位相誤差範囲を含む実電流位相領域を規定し、センサレス制御にてロータ位置を検出可能な安定運転電流位相領域を規定し、実電流位相領域が安定運転電流位相領域内となるように、電流ベクトル制御により設定された電流に、回転数検出手段で検出された回転数に応じた所定の位相差を加えたものを目標電流として設定する。
(もっと読む)
61 - 80 / 747
[ Back to top ]