
Fターム[5H560UA05]の内容
無整流子電動機の制御 (40,007) | 電子整流子機構の最終制御素子 (2,026) | 半導体素子 (1,954) | トランジスタ (1,852) | FET (1,265)
Fターム[5H560UA05]の下位に属するFターム
IGBT (511)
Fターム[5H560UA05]に分類される特許
141 - 160 / 754
交流電動機の制御装置および制御方法
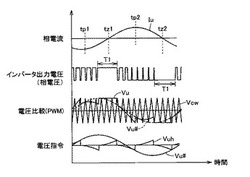
【課題】インバータを用いた交流電動機制御において、効率を低下させることなくインバータのスイッチングによるサージ電圧を抑制する。
【解決手段】交流制御指令(Vu)とキャリア信号(Vcw)との電圧比較に基づいて、インバータ各相のスイッチング素子のオンオフが制御される。交流制御指令(Vu)は、三相変調のための本来の交流電圧指令(Vu♯)に、3次高調波電圧(Vuh)を重畳することによって得られる。3次高調波電圧(Vuh)は、相電流の特定タイミング(tp1、tp2)を含む所定の電流位相期間(T1)において、当該相でのスイッチング素子のオンオフが固定されるように設定される。
(もっと読む)
モータ駆動制御装置並びに空気調和機、換気扇及びヒートポンプタイプの給湯機

【課題】外風によりファンが回転して、当該ファンの回転により発生するモータの起電力からモータ駆動制御装置を保護することができ、モータ巻き線のターン数を増加させることができ、モータ電流を低減することができるモータ駆動制御装置を得る。
【解決手段】ファンを回転させるモータ7を駆動するモータ駆動制御装置であって、直流電圧を交流電圧に変換してモータ7に印加するインバータ回路5と、インバータ回路5を制御してモータ7の運転を制御する制御手段とを備え、インバータ回路5は、モータ7の巻き線の各相の両端毎にスイッチング素子を有し、制御手段は、スイッチング素子のスイッチパターンを制御して、モータ7の運転を制御するものである。
(もっと読む)
シート搬送装置及び画像形成装置
【課題】減速時における速度変動を簡略な制御方式によって抑制するシート搬送装置及び画像形成装置を提供する。
【解決手段】DCブラシレスモータにて駆動されるシート搬送装置において、1周期内に、DCブラシレスモータを構成するコイルに通電する通電期間を含む力行PWM信号を生成すると共に、力行PWM信号と同じ1周期内の非通電期間に、前記コイルを短絡する短絡期間を含むブレーキPWM信号を生成する。力行PWM信号とブレーキPWM信号との両方を同時に用いて、PWM信号の周期毎に前記コイルへの通電と前記コイルの短絡とを行い、DCブラシレスモータの減速時において、回転速度が目標速度を下回る場合には通電期間を延長し、回転速度が目標速度を上回る場合には、通電期間を短縮する。
(もっと読む)
モータ駆動制御装置及びこれを使用した電動パワーステアリング装置
【課題】高回転・高電流時に誘起電圧の歪みによる誘起電圧補償誤差が著しく大きくなる場合に、誘起電圧補償誤差を低減させるようにしたモータ駆動制御装置及びこれを使用した電動パワーステアリング装置を提供する。
【解決手段】3以上の相数nの電動モータ12を駆動するモータ駆動制御装置であって、前記電動モータを駆動する電流指令値を演算する電流指令値演算部82と、前記電動モータのモータ角度を検出するモータ角度検出部13と、前記電動モータのモータ角速度を検出するモータ角速度検出部80と、前記モータ角速度で回転するd−q座標に沿って演算されたd軸電流及びq軸電流値の少なくとも一方と、前記モータ角速度及び前記モータ角度とに基づいて補償用誘起電圧を演算する補償誘起電圧演算部84とを備え、前記電動モータの誘起電圧を前記補償誘起電圧演算部で演算した補償用誘起電圧でフィードフォワード補償する。
(もっと読む)
ブラシレスモータ制御装置及び方法
【課題】インバータ回路の故障の有無を正確に判定することによってブラシレスモータを適切に制御することができるブラシレスモータ制御装置及び方法を提供する。
【解決手段】電流決定部21は、ブラシレスモータ1に流れる電流を決定する。故障判定部22は、インバータ回路2の故障の有無を判定する。駆動停止部23は、故障判定部22によりインバータ回路2に故障があると判定した場合、駆動回路3の駆動を停止する。禁止部24は、ブラシレスモータ1に流れる電流の値の絶対値が所定の値より小さい場合、駆動停止部23による駆動回路3の駆動の停止を禁止する。
(もっと読む)
画像形成装置及びブラシレスモータ制御プログラム
【課題】ロータの回転位置の検出精度低下を抑えつつ、無駄な電力消費を抑制することが可能な画像形成装置及びブラシレスモータ制御プログラムを提供する。
【解決手段】レーザプリンタ1は、受光センサ32,電圧検出回路39により検出されたFG信号、BD信号に基づきインバータ37Aによる通電をオンオフさせ、且つ、その通電オン期間にインバータ37Aをチョッピング制御し、当該チョッピング制御におけるデューティ比を変えることで目標値に近づくようブラシレスモータ33の回転速度を制御する制御回路38を備え、制御回路38は、当該チョッピング制御におけるオフ期間にFG信号、BD信号を取得し、設定されている目標値が小さいほど、チョッピング制御の周波数を低くする構成である。
(もっと読む)
電動機の駆動制御方法
【課題】モータが負荷保持停止位置で停止する時間を各相コイルで均一になるように駆動制御することで、各相コイルの発熱温度を均一化させた電動機の駆動制御方法を提供する。
【解決手段】制御回路7はモータコイル3に通電状態で、かつロータ2が負荷保持状態で回転停止させたロータ2の回転停止位置である負荷保持停止位置を、前回ロータ2が回転停止した負荷保持停止位置に対して電気角で((180/n)°;nは相数であり、2以上の整数)だけ所定回転方向にロータ2を回転させた位置で停止させる。
(もっと読む)
真空ポンプ用モータ駆動装置およびポンプシステム
【課題】モータ電流の高調波成分を低減することができる、真空ポンプ用モータ駆動装置の提供。
【解決手段】排気機能部としての回転翼およびネジロータが形成されたロータをモータで回転駆動して排気を行うターボ分子ポンプのモータ駆動装置において、モータを駆動するインバータ43と、インバータ43のインバータ入力電圧として、異なる複数の設定電圧を有する直流電圧源としてのDC/DCコンバータ41と、モータ負荷情報に応じてDC/DCコンバータ41の設定電圧を切り換える電圧切換手段としてのモータ制御回路44とを備え、モータ制御回路44は、モータの回転数が所定の目標回転数に維持されるようにPWM信号のデューティ比を設定し、インバータ43をPWM制御するようにした。
(もっと読む)
電動パワーステアリング装置
【課題】構成簡素且つ信頼性の高い異常判定を行なうことのできる電動パワーステアリング装置を提供すること。
【解決手段】ECU11は、モータ制御信号出力手段として、同一の電流フィードバック演算を実行する独立した二つのマイコン21a,21bを備える。また、各駆動回路22u,22v,22wを構成する二列のスイッチングアームSA1,SA2は、それぞれ、上記各マイコン21a,21bの何れかと関連付けられるとともに、その関連付けられた各マイコン21a,21bの出力するモータ制御信号Smcu,Smcv,Smcwのみに基づいて、独立に作動する。そして、各マイコン21a,21bは、その電流フィードバック演算における過大な電流偏差の発生を監視することにより、システムの異常判定を実行する。
(もっと読む)
モータ駆動装置および画像形成装置
【課題】本発明は、モータの待機時の省電力化を図ることができるモータ駆動装置および画像形成装置を提供することを目的とする。
【解決手段】本発明のモータ駆動装置812は、モータ129と、第1外部電源装置からの電力供給により、前記モータを駆動するモータ駆動部102と、上位制御部804が出力する制御信号に対応して、前記モータ駆動部102を制御することにより、前記モータ129の回転を帰還制御するモータ制御部110と、前記制御信号がモータ駆動指令を示すときの、第2外部電源装置から前記モータ制御部への電力供給と、前記制御信号がモータ停止指令を示すときの、前記第2外部電源装置から前記モータ制御部への電力供給の停止とを切り替える切替部101と、を備えることを特徴とする。
(もっと読む)
三相交流電動機の駆動制御装置
【課題】位相制御上の要求に対して適切な通電制御を行いつつ、電流の急激な変動を抑える。
【解決手段】モータ駆動制御装置は、三相モータの駆動制御を180°通電モードにより行い、算出した位相角度φ1,φ2によって通電パターンの出力タイミングを進角制御する。位相切り替わりタイミング(時刻t1)において60°以上の位相角度の変化が生じた場合、全相のMOSFETを一時的にOFFにさせ、切り替わり後の位相角度φ2で通電パターンの出力タイミングを進角制御する。
(もっと読む)
モータ制御装置及び電動パワーステアリング装置
【課題】実回転角に基づく回転角速度検出を行うことなく、精度よく、電力供給経路における通電不良の発生を検出することが可能なモータ制御装置を提供すること。
【解決手段】通電不良検出部は、誘起電圧二乗和Esq_αβが、所定の閾値E1を超えるか否かを判定する(ステップ602)。また、モータ回転角速度推定値ωm_eが所定の閾値ω1よりも低いか否かを判定する(ステップ603)。そして、その誘起電圧二乗和Esq_αβが最高速回転状態に対応する最大領域にあるにもかかわらず(Esq_αβ>E1、ステップ602:YES)、モータ回転角速度推定値ωm_eは非回転状態を示す最小領域にある(ωm_e<ω1、ステップ603:YES)という矛盾を検知した場合に、何れかの相に通電不良の発生を示す異常があると判定する(ステップ604)。
(もっと読む)
制御装置
【課題】専用のモニタ信号端子を設けること無く、自由度の高い様々なモニタ信号を出力可能な制御装置を提供する。
【解決手段】通信線Sを介して送信される信号に基づいて制御対象を制御する制御装置20であって、所定の信号入力を検知すると前記制御対象を制御する制御モードから検査モードに移行するモード切替部20aと、前記モード切替部により前記検査モードに移行すると、前記通信線を介して送信または受信する信号の信号形態を、前記制御モードで用いる第1信号形態から第1信号形態とは異なる第2信号形態に変更して通信を行なう通信部20bと、を備えている。
(もっと読む)
モータ及びそれを用いたポンプ並びに液体循環装置
【課題】待機電力を低減可能なモータを簡単な構成で安価に実現するととともに、このモータを備えたポンプ並びに液体循環装置を提供する。
【解決手段】モータは、モータコイル5と、モータコイル5に電力を供給するモータ駆動用電源1と、モータコイル5の駆動を制御する制御回路3と、モータ駆動用電源1から電力供給を受けて制御回路3に動作電力を供給するレギュレータ2とを備える。モータ駆動用電源1とレギュレータ2との間には、スイッチSW1のON/OFF操作に応じて入力される外部信号によってON/OFF状態が切り替えられるスイッチSW2が設けられており、スイッチSW2のON/OFF状態に応じてレギュレータ2の出力がON/OFFされるようになっている。その結果、レギュレータ2の出力がOFFになっている状態では、待機電力を低減することができるのである。
(もっと読む)
単相交流同期モータ
【課題】整流波の平滑を不要とし、かつ、起動運転から同期運転への切換を安定して行うことが可能な単相交流同期モータを提供する。
【解決手段】本発明に係る単相交流同期モータは、位置センサ8の検出信号に基づいて整流電流を単相コイルL1の両方向に交互に流してモータを起動運転し、永久磁石ロータが第1の所定回転数に到達するまで回転数を上げるセンサ起動期間を有する起動運転回路1aと、永久磁石ロータの回転数が同期回転数を越えずに同期回転数付近の第2の所定回転数に到達し、位置センサ8の検出信号の立ち上がりまたは立ち下がりと交流電流のゼロクロス点とが略一致したタイミングで同期運転へ移行するように制御する制御手段5を備えている。
(もっと読む)
モータ制御装置及びバルブタイミング調整装置並びにインバータ回路の通電制御方法
【課題】モータの実回転方向が回転方向指令と逆になった場合に、フリーホイールダイオードにおいて発生する損失を軽減できるモータ制御装置を提供する。
【解決手段】制御回路60は、外部より指令として与えられるモータ4の目標回転方向Dtと、回転角センサSU,SV,SWが出力するセンサ信号に基づき信号生成ブロック72により検出されるモータ4の実回転方向Drとが相違する方向不一致状態を検出すると、120度通電方式から180度通電方式に切り替えてインバータ部76を構成する上段スイッチング素子FU,FV,FWのオン期間を進み位相側に拡げるように制御し、還流電流を上段スイッチング素子FU,FV,FWを介して流す。
(もっと読む)
モータ制御装置及び電動パワーステアリング装置
【課題】回転角速度検出を行うことなく、精度よく、電力供給経路における通電不良の発生を検出することのできるモータ制御装置を提供すること。
【解決手段】通電不良検出部は、通電状態にあるべき特定相(X=U,V,W、|Ix*|>I2)の相電流値が非通電状態を示す値(|Ix|<I1)であり、且つ他相の相電流値が通電状態を示す値(|Iy|>I3)である場合には、その特定相に通電不良の発生を示す異常があると判定する。
(もっと読む)
電動機駆動装置、および、それを用いた電動パワーステアリング装置
【課題】断線故障箇所を特定可能な電動機駆動装置を提供する。
【解決手段】電源リレー61、62を導通状態となるように制御したとき(S101)、導通状態となるように制御された第1電源リレー61および第2電源リレー62よりもモータ2側に電力が供給されていないと判断された場合(S104:YES)、電源リレー61、62自体の故障ではなく、第1電源リレー61および第2電源リレー62とバッテリ55との間の配線56が断線していると特定する(S105)。これにより、故障箇所を適切に特定することができる。この場合、第1電源リレー61および第2電源リレー62とバッテリ55との間の配線56を交換すればよいので、電動機駆動装置1の分解、精査を行う必要がなく、故障箇所の特定に係る工数を低減することができる。
(もっと読む)
ブラシレスモータの制御
【課題】ブラシレスモータの制御の技術を提供する。
【解決手段】流電圧を整流して少なくとも50%のリップルを有する整流電圧を供給する段階と、整流電圧でモータの巻線を励起する段階と、整流電圧に比例した閾値を超える巻線の電流に応答して第1の処理又は第2の処理を実行する段階とを含むブラシレスモータを制御する方法。第1の処理は、巻線をフリーホイールさせる段階を含み、一方、第2の処理は、オーバーラン期間にわたって巻線を励起し続けてオーバーラン期間の終了時に巻線をフリーホイールさせる段階を含む。更に、本方法を実行する制御システム及び制御システムを組み込むモータシステム。
(もっと読む)
ブラシレスモータの制御
【課題】ブラシレスモータの制御の技術を提供する。
【解決手段】巻線の電流が閾値を超えるまでモータの巻線を励起する段階とオーバーラン期間にわたって巻線を励起し続ける段階とを含むブラシレスモータを制御する方法。オーバーラン期間の長さは、次に、時間、モータ速度、及び励起電圧のうちの1つの変化に応答して調節される。更に、本方法を実行する制御システム及び制御システムを組み込むモータシステム。
(もっと読む)
141 - 160 / 754
[ Back to top ]