
Fターム[5H560UA06]の内容
無整流子電動機の制御 (40,007) | 電子整流子機構の最終制御素子 (2,026) | 半導体素子 (1,954) | トランジスタ (1,852) | FET (1,265) | IGBT (511)
Fターム[5H560UA06]に分類される特許
1 - 20 / 511
モータ制御装置
ブラシレスモータの制御方法
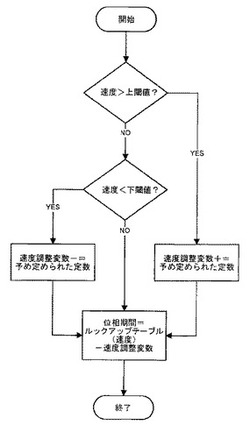
【課題】モータの公差及びモータが作動するときの負荷の公差に関わらずモータの速度を制御可能な、ブラシレスモータの制御方法を提供する。
【解決手段】本発明によるブラシレスモータを制御する方法は、複数の速度の各々の制御値を含むルックアップテーブルを記憶し、速度調整制御値を定期的に得、モータの相巻線を励起させる。速度調整制御値は、励起の位相及び長さの一方を定める。速度調整制御値を得るのに、モータの速度を測定し、測定された速度が閾値よりも大きいとき又は小さいとき、速度調整変数を定数だけ増大させ又は減少させ、測定された速度を用いて、制御値をルックアップテーブルから選択し、速度調整変数を用いて、選択された制御値を調整して、速度調整制御値を得る。本発明は、上記方法を実行する制御システム、及び、ブラシレスモータ及び制御システムを有するモータ組立体にも関する。
(もっと読む)
コンベヤ駆動装置

【課題】部品点数を削減して納期の短縮化とコストダウンを図り得ると共に、効率を高めて省エネルギ化とコンパクト化を図ることができ、更に外観向上をも図り得るコンベヤ駆動装置を提供する。
【解決手段】コンベヤ1の駆動軸2をダイレクトドライブ方式で回転駆動する永久磁石同期モータ3を備え、該永久磁石同期モータ3の各相の巻線に発生する誘起電圧に対して進み位相となるよう通電を行うことにより、該永久磁石同期モータ3が所定の回転数範囲内でトルク一定となるよう構成する。
(もっと読む)
交流電動機の制御装置
【課題】パルス幅過変調制御方式を使用するときのキャリア周波数に起因する雑音の官能上の感度を低減する。
【解決手段】ECU3は、モータの回転に伴って発生する雑音の周波数成分であり、且つ、その周波数がモータの回転数整数倍である高調波の周波数成分のうち、振幅が最大である高調波の周波数を求める周波数算出部35と、パルス幅過変調制御方式による制御を実施するときのキャリア周波数を、周波数算出部35によって求められた高調波の周波数に設定する周波数設定部36と、を備える。
(もっと読む)
永久磁石同期電動機のd軸電流を制御するモータ制御装置
【課題】過熱による永久磁石同期電動機の永久磁石の熱減磁が生じる事態を回避することができるモータ制御装置を提供する。
【解決手段】q軸電流及びd軸電流検出部11は、q軸電流Iq及びd軸電流Idを、U相電流IU、V相電流IV及びW相電流IW及びロータ52の回転角度θに基づいて検出する。q軸電流指令値生成部12は、q軸電流指令値Iqcomを速度指令値ωcomに基づいて生成する。d軸電流指令値生成部13は、永久磁石同期電動機5の定常時における永久磁石54a,54b,54c,54dの温度上昇量が最小になるd軸電流指令値Idcomを、ロータ52の回転速度ωに基づいて生成する。
(もっと読む)
ブラシレスモータを始動させる方法
【課題】ロータ位置センサの位置の公差に厳しい精度が要求されない、ブラシレスモータの始動方法を提供する。
【解決手段】本発明は、ブラシレスモータを始動させる方法に関する。ブラシレスモータ(1)は、ロータ(2)と、少なくとも1つの相巻線(4)を有するステータ(3)と、ロータ位置センサ(5)を有する。上記方法は、巻線(4)を励起させ、ロータ位置センサ(5)が出力した信号を感知することを含む。信号のエッジを第1期間の間に感知した場合には、エッジに応答して、巻線(4)を整流する。信号のエッジを第1期間の間に感知しない場合には、第1期間の終了時に巻線(4)を整流し、信号を感知し、第2期間の間に感知した信号の2つのエッジのうちの第2のエッジに応答して巻線(4)を整流する。
(もっと読む)
回転電機制御装置
【課題】電流の増加に伴う損失の増加を抑制しつつ、パルス幅変調から矩形波制御への円滑な制御の切り換えを実現する。
【解決手段】矩形波制御の実行中における変調率よりも低い値である所定の基準変調率MRに基づいて、スイッチング制御部14が用いる制御方式の切り替えを決定する制御方式決定部16は、実変調率MIが基準変調率MR以上であり、さらに、回転電機の回転速度ωが所定の矩形波移行回転速度以上であることを切り換え条件として、パルス幅変調制御から矩形波制御への切り替えを決定する。弱め界磁電流指令決定部12は、基準変調率MRに固定された変調率指令Mと実変調率MIとの差分に応じて、弱め界磁電流指令ΔIdを決定する。矩形波移行回転速度は、少なくとも直流電圧Vdcに応じて異なる値に設定されている。
(もっと読む)
駆動装置
【課題】モータの動作可能領域のうち非昇圧領域が狭くなるのを抑制する。
【解決手段】コンデンサの電荷を放電させる所定放電処理を実行したときの電流積算値Icと放電開始前電圧VHstartと放電終了後電圧VHendとを用いてコンデンサの容量Cvhを計算し、計算したコンデンサの容量Cvhに応じて共振領域の下限回転数Nrfminおよび上限回転数Nrfmaxを設定し、設定した共振領域の下限回転数Nrfminおよび上限回転数Nrfmaxを用いて共振領域が昇圧領域に含まれるよう昇圧領域と非昇圧領域とを区分する昇圧/非昇圧ラインを設定する。
(もっと読む)
電気機械のロータ角度を推定する方法およびシステム
【課題】電気機械のロータ角度またはロータ位置を精度高く推定する。
【解決手段】永久磁石電気機械117に結合されたエンコーダ115から、位置サンプルが格納される。データ・プロセッサが、連続する位置サンプル間における第1位置変化と、連続する第1位置変化における第2変化とを判定する。データ・プロセッサは、各第1位置変化が全体的に増大しているか、減少しているか、または一定であるか判定を行う。第1位置変化が全体的に増大しているかまたは減少しているかに基づいて、格納された各位置サンプルに補正位置係数が適用される。データ・プロセッサは、位置サンプルの内特定の1つと、それぞれの時点に対応する位置サンプルの特定の1つと関連した、対応する第1位置変化とに基づいて、電気機械の最終ロータ角度を推定する。
(もっと読む)
回転電機制御システム
【課題】回転電機制御システムにおいて、電流センサの検出電流値に誤差が重畳している場合でも、過電流及び過電圧の発生を有効に防止することである。
【解決手段】回転電機制御システム10は、回転電機であるモータジェネレータMG2と、リアクトル20を含むDC/DCコンバータ14と、DC/DCコンバータ14に接続された平滑コンデンサC1,C2と、正弦波PWM制御方式または過変調制御方式または矩形波制御方式でインバータを制御する制御部18とを含む。制御部18は、正弦波PWM制御方式の実行時に、LC共振回路の共振周波数領域の周波数とモータジェネレータMG2のパワー変動の周波数とが一致したときに、インバータ16の入力電圧VHを低下させ、インバータ16の制御方式を正弦波PWM制御方式から過変調制御方式または矩形波制御方式に切り替える電圧低下制御部30を有する。
(もっと読む)
モータ駆動装置
【課題】3相DCブラシレスモータ駆動装置において、1個のホール素子によるロータ位置検出でも、安定したモータ駆動を実現できる3相DCブラシレスモータ駆動装置を提供すること。
【解決手段】ロータ位置検出手段として1個のホール素子10を備え、前記ホール素子10からのロータ位置検出信号に基づき励磁コイルの励磁パターンを決定する機能を有したモータ駆動装置において、ロータ位置検出信号から算出されるモータ回転数と目標モータ回転数との乖離量が設定値以下である場合には、前記ロータ位置検出信号の立上りエッジ14もしくは立下りエッジ15の片エッジのみを用いて励磁パターンを決定し、前記乖離量が設定値より大きい場合には、前記ロータ位置検出信号の立上りエッジ14および立下りエッジ15の両エッジを用いて励磁パターンを決定する構成とする。
(もっと読む)
モータ制御装置
【課題】安定性を確保した位置センサレスの正弦波通電が可能なモータ制御装置を提供する。
【解決手段】モータ制御装置は、単相交流電源を入力とする整流回路と、整流回路と接続され、整流回路で得られた直流電力を三相交流電力に変換し、接続されるモータを駆動するインバータと、小容量のコンデンサと、インバータを制御する制御装置と、単相交流電源のゼロクロス点を検出するゼロクロス点検出回路とを備え、制御装置は、モータの回転数を設定する回転数設定手段と、モータの回転数を補正する第1の回転数補正手段と、第1の回転数補正手段とは異なる方式でモータの回転数を補正する第2の回転数補正手段と、ゼロクロス点の検出からの経過時間に応じて第1および第2の回転数補正手段の一方を選択する回転数補正選択手段とを含む。
(もっと読む)
同期電動機の制御装置及び制御方法
【課題】駆動する永久磁石同期電動機が任意のモータであっても、弱め界磁制御と最大トルク制御との切り換えを安定して行うことができる同期電動機の制御装置及び制御方法を提供する。
【解決手段】最大線間電圧演算部11によって演算された最大線間電圧VmaxとPMモータ1の電気角速度ωeとを用いて弱め界磁制御用のd軸電流演算値を演算するd軸電流演算部12と、最大線間電圧VmaxとPMモータ1の電気角速度ωeとに基づいて、弱め界磁制御用のd軸電流演算値と最大トルク制御用のd軸電流設定値とのいずれかをd軸電流指令値Id*として出力させる弱め界磁制御切換部13とを設ける。また、d軸電流演算部12によって、最大線間電圧Vmaxと、PMモータ1の電気角速度と、PMモータ1のモータパラメータである逆起電力係数及びd軸インダクタンスとからd軸電流演算値を演算する。
(もっと読む)
電動機の制御データ更新方法と制御装置
【課題】電動機の個体差に応じてマップのデータを最適化できるようにする。
【解決手段】トルクと駆動電流及び電流位相角との関係を示すマップを参照して、目標トルクが出力されるように同期電動機の駆動装置を制御しつつ(S1)、当該同期電動機の出力軸に取り付けたトルク測定器で実トルクを測定する(S2)。この実トルクの測定結果に基づいて、目標トルクが出力されているか否か判断し(S3)、目標トルクが出力されていない場合に、現在の駆動電流の電流位相角を変更してトルク測定器で実トルクを測定することにより、当該測定トルクが最適値になる電流位相角を決定し(S4〜S6)、この決定した電流位相角に基づいてマップを更新する(S7)、電動機の制御データ更新方法を提案する。
(もっと読む)
モータ制御装置
【課題】大きなリプルを有する直流電源でモータをインバータ制御した場合、モータの回転が不安定となり、振動や騒音の増大や、最悪の場合、脱調や過電流停止を引き起こす。
【解決手段】モータ制御装置は、交流電源を直流出力電圧(Vdc)に変換して出力するコンバータ(3)と、直流出力電圧を交流電流に変換してモータ(1)を駆動するインバータ(2)と、モータの回転数指令を設定する回転数設定部(12)と、回転数指令に基づきインバータ(2)を制御するPWM信号生成部(15)と、加速禁止直流電圧(d)を設定する加速禁止直流電圧設定部(16)と、加速禁止直流電圧(d)および直流出力電圧(Vdc)に基づき、モータの加速制御信号(e)を生成する加速判定部(17)とを有し、加速制御信号(e)に基づき、回転数指令の変更を禁止する。
(もっと読む)
モータ制御装置およびモータ制御方法
【課題】パルス幅変調制御方式によるPWM制御モードと、矩形波制御方式によるワンパルス制御モードとを有するモータ制御装置において、パルス幅変調制御方式と矩形波制御方式とを通じて適切に電流オフセットを抑制できるようにする。
【解決手段】低周波成分抽出部151は、インバータ168がモータMに供給する電流のうち低周波成分を抽出する。また、ゲイン設定部140は、低周波成分抽出部151が抽出した低周波成分に作用させるゲインを、PWM制御モードにおけるゲインが、ワンパルス制御モードにおけるゲインよりも小さくなるように設定する。そして、オフセット補正部165は、低周波成分抽出部151が抽出した低周波成分に、ゲイン設定部140が設定したゲインを作用させて得られるオフセット補正指令値に基づいて、インバータ168がモータMに供給する電流のオフセットを低減させるオフセット補正を行う。
(もっと読む)
ブラシレスモータの駆動装置
【課題】ブラシレスモータの脱調を抑制する。
【解決手段】複数の巻線を備えたブラシレスモータの各相に対するパルス電圧の通電モードを切り替えることで、ブラシレスモータを回転駆動するブラシレスモータの駆動装置は、非通電相の電圧(誘起電圧)と電圧閾値とに基づいて通電モードを順次切り替える(S36〜S40)。また、ブラシレスモータの駆動装置は、パルス電圧の印加直後に現われる誘起電圧の振れを検出しないように、PWM制御のデューティ比の下限値を設定すると共に(S33)、誘起電圧が低下しないように、通電モードの切り替えタイミングにおける誘起電圧変化と電圧閾値に基づいてデューティ比の上限値を設定する(S34)。そして、デューティ比をその上限値及び下限値で画定される範囲内に規制することで、ブラシレスモータの脱調を抑制する。
(もっと読む)
モータ制御装置
【課題】単一の電流検出素子によりモータに供給される各相の電流を、発熱を抑制しつつ検出する。
【解決手段】実施形態によれば、電流検出素子をインバータ回路の直流側に接続して電流値に対応する信号を発生させ、PWM信号生成手段は、モータの相電流に基づいてロータ位置を決定するとそのロータ位置に追従するように3相のPWM信号パターンを生成する。電流検出手段が、電流検出素子に発生した信号とPWM信号パターンとに基づいてモータの相電流を検出する場合、PWM信号生成手段は、電流検出手段がPWM信号の搬送波周期内で固定された2点のタイミングで2相の電流を検出可能となるよう3相のPWM信号パターンを生成する。電流判定手段は、検出された3相電流の大小関係を判定し、PWM信号生成手段は、3相間のPWMデューティ比を維持した状態で、検出された3相電流のうち最大相の通電期間をゼロ又は最小とするようPWM信号パターンを補正する。
(もっと読む)
モータ制御装置
【課題】単一の電流検出素子により、モータに供給される各相の電流をより高い精度で検出できるモータ制御装置を提供する。
【解決手段】実施形態によれば、モータ制御装置は、直流を多相交流に変換する電力変換器を介してモータを駆動し、モータのロータ位置に追従するように通電パターンを生成する。通電信号生成手段は、通電制御周期内で電力変換器の直流側に接続され電流検出素子に発生する信号が少なくとも2相の電流に対応するよう通電パターンを生成し、電流検出手段は、電流検出素子に発生した信号と通電パターンとに基づき相電流を検出する。電流補正手段は検出された電流に含まれる誤差を補正し、電流制御手段は入力される電流指令値と補正された電流とに応じて通電信号生成手段が通電パターンを生成するための電流制御を行い、制御切り替え手段は、補正値演算指令を出力すると共に、前記指令の出力状態に連動して電流制御手段が電流制御を行う周期を切り替える。
(もっと読む)
モータ制御システム
【課題】矩形波制御実行中にコンバータによる昇圧動作の開始を適時に行ってシステム損失の増加を抑制することができるモータ制御システムを提供する。
【解決手段】モータ制御システムは、電源、コンバータ、インバータおよび交流モータと、コンバータおよびインバータの作動を制御することにより、正弦波PWM制御、過変調制御および矩形波制御のいずれかの制御方式でモータを駆動させる制御部とを備える。制御部は、電源から供給される直流電圧をコンバータで昇圧せずにインバータに供給し、モータについて、モータ電流のd軸q軸平面上における電流ベクトルの電流位相が最適電流進角またはその近傍で矩形波制御が実行されるように制御する。この場合において、制御部は、電流ベクトルが昇圧開始前後でシステム損失が等しくなるモータトルクT2に相当する電流位相になったときにコンバータによる昇圧動作を開始させる。
(もっと読む)
1 - 20 / 511
[ Back to top ]