
Fターム[5H560XA17]の内容
無整流子電動機の制御 (40,007) | 制御方式 (6,312) | 界磁制御 (115)
Fターム[5H560XA17]の下位に属するFターム
補償巻線を設けるもの (4)
Fターム[5H560XA17]に分類される特許
1 - 20 / 111
電気自動車のモータ制御装置
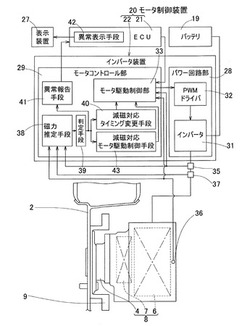
【課題】 埋込磁石型同期モータにおいて、永久磁石の減磁が生じた場合に、モータ駆動力の低下を抑えることのできる電気自動車のモータ制御装置を提供する。
【解決手段】 モータ6のロータの永久磁石の磁力を推定する磁力推定手段38と、その判定手段39と、減磁対応タイミング変更手段40とを、インバータ装置22またはECU21に設ける。磁力推定手段38は、モータ回転数、モータ電圧、およびモータ電流の内の少なくとも2つの検出信号から、定められた規則に従い、磁力の推定を行う。判定手段39は、減磁であるか否かを判定する。減磁対応タイミング変更手段40は、判定手段39による減磁であるとの判定結果に応じて、インバータ装置22によるモータ駆動につき、モータのリラクタンストルクが増大するように、ロータの位相に対する最大電流を流すタイミングを変更する。
(もっと読む)
コンベヤ駆動装置

【課題】部品点数を削減して納期の短縮化とコストダウンを図り得ると共に、効率を高めて省エネルギ化とコンパクト化を図ることができ、更に外観向上をも図り得るコンベヤ駆動装置を提供する。
【解決手段】コンベヤ1の駆動軸2をダイレクトドライブ方式で回転駆動する永久磁石同期モータ3が、低保持力の永久磁石である可変磁石を備えた可変磁束モータ3aであり、回転数に応じて可変磁石に磁化電流を供給し磁束を制御することにより、可変磁束モータ3aが所定の回転数範囲内でトルク一定となるよう構成する。
(もっと読む)
回転電機制御装置
【課題】電流の増加に伴う損失の増加を抑制しつつ、パルス幅変調から矩形波制御への円滑な制御の切り換えを実現する。
【解決手段】矩形波制御の実行中における変調率よりも低い値である所定の基準変調率MRに基づいて、スイッチング制御部14が用いる制御方式の切り替えを決定する制御方式決定部16は、実変調率MIが基準変調率MR以上であり、さらに、回転電機の回転速度ωが所定の矩形波移行回転速度以上であることを切り換え条件として、パルス幅変調制御から矩形波制御への切り替えを決定する。弱め界磁電流指令決定部12は、基準変調率MRに固定された変調率指令Mと実変調率MIとの差分に応じて、弱め界磁電流指令ΔIdを決定する。矩形波移行回転速度は、少なくとも直流電圧Vdcに応じて異なる値に設定されている。
(もっと読む)
モータ制御装置
【課題】電動車両がスリップを起こした場合にモータ50の過電流を抑制すると共に、トルクの減少を抑制する。
【解決手段】電動車両を駆動するモータ50の回転数Nとトルク指令値Trqcomに応じてモータ50に印加する電圧波形を矩形波形又は非矩形波形に設定するマップを含み、マップに基づいてモータ50を制御する電動車両のモータ制御装置であって、電動車両がスリップしたと判定した際に、マップの矩形波形を印加する領域の中に矩形波形を印加することを禁止する矩形禁止領域Aを設定し、モータ50の回転数Nとトルク指令値Trqcomとが矩形禁止領域Aに入った場合に、モータ50に印加する電圧波形を矩形波形から非矩形波形に切り替えるとともに、モータ50の制御方式を最大トルク制御から弱め界磁制御に切り替える。
(もっと読む)
モータ制御システム
【課題】交流モータにおいて最適電流進角ライン上か又はその近傍での電流位相による矩形波制御を積極的に用いることによってシステム全体の損失を効果的に低減する。
【解決手段】モータ制御システム10は、バッテリ11からの直流電圧を昇降圧可能なコンバータ20と、コンバータ20による昇圧直流電圧を交流電圧に変換するインバータ22と、インバータ22から交流電圧が印加されて駆動される交流モータM1と、入力されるトルク指令値に応じてコンバータ20およびインバータ22を作動制御することにより交流モータを矩形波制御等の複数の制御方式で駆動制御可能な制御部26とを備える。制御部26は、交流モータM1が矩形波制御中であるとき、交流モータM1に流れるモータ電流のd軸q軸平面上における電流ベクトルの電流位相(id,iq)が最適電流進角ライン上に近づくようにシステム電圧指令値VH*を補正する。
(もっと読む)
インバータ制御装置および車両
【課題】矩形波制御から過変調制御に切り替えた後のモータのトルク変動を抑制する。
【解決手段】過変調制御によってインバータを制御するときに、d軸,q軸の電流Id,Iqと電流指令Id*,Iq*との差分と比例項,積分項の制御ゲインと積分項の積分区間とを用いた電流フィードバック制御によってd軸,q軸の電圧指令Vd*,Vq*を設定してインバータを制御するものにおいて、矩形波過変調切替時に、矩形波過変調切替によるモータのトルク変動が大きくなりやすい変動想定状態のときには(S110,S120)、変動想定状態でないときに比して比例項,積分項のゲインを大きくすると共に積分項の積分区間を短くする(S140)。
(もっと読む)
電動パワーステアリング装置
【課題】3相電動モータで1相に異常が発生したときに、操舵フィーリングを悪化させることなく、残りの2相を用いてモータ駆動を継続できる電動パワーステアリング装置を提供する。
【解決手段】異常検出手段で各相コイルのうちの1相の駆動系統に通電異常を検出したとき、異常時モータ指令値算出手段34で、操舵補助電流指令値Irefに基づいて残りの2相のコイルを使用する異常時相電流指令値を算出し、その異常時相電流指令値に基づいて3相電動モータ12を駆動する。その際、操舵トルク及び前記3相電動モータ12で発生する操舵補助トルクの和と外力との釣合い時に、前記異常時相電流指令値を低下させる電流指令値補正手段を備えている。
(もっと読む)
電動車両
【課題】電動機の回転軸の回転角を検出するセンサに角度ズレが生じていても、電動機の予期しない回生制動を回避して、二次電池の過充電をより確実に抑止する。
【解決手段】d軸にマイナス方向の電流Idを流すと共にq軸に電流が流れないように電流指令Id*,Iq*を設定してモータを制御する際には、制御に用いる回転角センサからの回転角θをモータの正転時には逆転方向に補正し、モータの逆転時には正転方向に補正することにより、回転角θを回生から力行に向かう方向に補正する。これにより、回転角センサにオフセット誤差が含まれていても、補正した回転角θに基づいてモータMG2を制御することにより、q軸にモータMG2の回転方向とは逆方向の電流が流れない、即ち回生トルクが出力されないようにすることができる。この結果、モータが予期せずに回生するのを防止でき、二次電池の過充電を抑止することができる。
(もっと読む)
回転電機制御装置
【課題】可変磁束型の回転電機の運転状態や界磁磁束の調整によるロータ表面の磁気抵抗の変化などを考慮して界磁磁束の調整を最適に制御することを可能としつつ、界磁調整のためのロータ間位相の調整量を少なく抑えることができる技術を提供する。
【解決手段】第1ロータ41と第2ロータ42との相対位置を示す位相指令γ*が、目標トルクT*及び回転速度ωに応じて規定された位相マップ70として、界磁磁束が最大となる相対位置を含むように設定された位相範囲内で位相指令γ*が規定された低回転速度域位相マップ7Lと、界磁磁束が最小となる相対位置を含むように設定された位相範囲内で位相指令γ*が規定された高回転速度域位相マップ7Hとを有する。相対位相制御部7は、回転速度ωに基づいて、低回転速度域位相マップ7Lと高回転速度域位相マップ7Hとを切り換えて参照し、位相指令γ*を決定して、相対位置を調整する。
(もっと読む)
航空機エンジンスタータ/発電機およびコントローラ
【課題】始動モードと発電モードの両方において、高い電力密度、高い効率、および高い動的性能を有する、スタータ/発電機、およびインバータ/コンバータ/コントローラを含む航空機エンジンスタータ/発電機システムを提供する。
【解決手段】航空機用始動および発電システムは、主機械、励磁器、および永久磁石発電機を含むスタータ/発電機を含む。システムは、また、スタータ/発電機に接続され、航空機の原動機を始動するための始動モードにおいてスタータ/発電機を駆動するAC電力を発生し、原動機が始動した後にスタータ/発電機から取得されるAC電力をスタータ/発電機の発電モードのDC電力に変換するインバータ/コンバータ/コントローラを含む。励磁器は固定子および回転子を含み、励磁器回転子は3相AC巻線を含む。
(もっと読む)
ブラシレスDCモータ制御方法およびその装置
【課題】磁極位置角の検出を行うことなくブラシレスDCモータを駆動する。
【解決手段】インバータ部1からの出力波形をブラシレスDCモータ2に供給し、ブラシレスDCモータ2の電圧、電流、もしくは磁束を検出し、検出信号を位相基準発生部3に供給して位相基準を発生し、発生した位相基準および外部から与えられる位相指令に基づいて波形制御部4から波形制御信号を出力し、出力波形位相を所定値とすべくインバータ部1を制御する。
(もっと読む)
モータ駆動制御装置とモータ駆動方法
【課題】三相モータを高速且つ高トルクで駆動可能とする。
【解決手段】三相モータ30の各相の電流から、マグネットトルク電流iqrとリラクタンストルク電流idrとを求めてフィードバック制御を行う。この際、回転角センサ109の測定した回転角θに、制御システムの遅れに相当する回転角を所定の角度deg分加算することにより、遅れ補償制御を行い、モータの応答性を高める。さらに、弱め磁束制御を行って、モータの応答性を高める。制御系の遅れは、無駄時間と一次遅れ系の時定数とで近似する。
(もっと読む)
永久磁石モータ駆動システム
【課題】回転子に設けられた永久磁石の磁極を判別でき、実用性に適した永久磁石モータ駆動システムを提供することにある。
【解決手段】回転子にコイルとダイオードが直列に接続された磁束変化抑制回路が組み込まれた永久磁石モータ1を駆動するための電力を供給するインバータ2を制御して、永久磁石モータ1を駆動制御する永久磁石モータ駆動システム10において、制御装置5は、コイルに鎖交する軸方向に磁束変化させる界磁電圧を発生させ、インバータ2の電流応答Iuvwを検出して、回転子の永久磁石をNS極判別し、NS極判別結果を用いてインバータ2を制御する。
(もっと読む)
モータ制御装置及び乗り物
【課題】弱め磁束制御の実行時に発生しうるトルク誤差を低減する。
【解決手段】軸誤差推定部は、dq座標系と異なる制御座標系との位相差である軸誤差を推定する。qm軸は、最大トルク制御の実現時における出力電流ベクトルの向きと向きが一致する回転軸である。弱め磁束制御の実行時において、モータの出力電流ベクトルがトルク指令値に従った定トルク曲線311に沿うように、弱め磁束用の電流に応じて軸誤差の目標値θtを設定する。軸誤差を目標値θtに一致させるPLLを形成することで、モータの出力電流ベクトルV323の終点は定トルク曲線311上にのる(即ち、出力トルク及びトルク指令値間のトルク誤差がゼロになる)。
(もっと読む)
パワーステアリング装置
【課題】アイドルストップ機能を有する自動車に搭載されるパワーステアリング装置において、電動モータが発電状態となったときに発生する起電力から電動モータ駆動用のインバータを保護しつつ、アイドルストップ中の消費電力を低減する。
【解決手段】アイドルストップ中であるか否かを判定するアイドルストップ状態判定手段(ステップS106,107)と、上記電動モータが発電状態にあるか否かを判定する発電状態判定手段(ステップS102)と、を設け、アイドルストップ状態判定手段がアイドルストップ中でないと判定している場合、少なくとも上記電動モータが発電状態にあると上記発電状態判定手段が判定しているときに弱め界磁制御を行う一方、上記アイドルストップ状態判定手段がエンジンの自動停止中であると判定している場合には弱め界磁制御を停止する。
(もっと読む)
駆動装置の制御装置
【課題】可変磁束型回転電機を備えた駆動装置を制御する制御装置の規模を増大させることなく、誘起電圧をインバータの耐圧の限度内に収めることができる技術を提供する。
【解決手段】永久磁石を備えたロータとコイルを備えたステータとを有する回転電機と、ロータから供給される界磁束を変化させる界磁調整機構と、コイルに接続されたインバータとを備えた駆動装置を制御する駆動装置の制御装置は、コイルに誘起される誘起電圧がインバータの耐圧Vmaxを越えない範囲内でロータの回転速度に応じて設定された界磁制限値Blmtを上限として、少なくとも回転速度に基づいて界磁調整機構により調整される界磁束の目標となる界磁指令値を決定する。
(もっと読む)
車両用回転電機の駆動制御装置
【課題】車両が停車又は低速走行しているときにおいて、特に過変調電流制御のキャリアに起因する騒音を十分に低減することが可能な車両用回転電機の駆動制御装置を提供することである。
【解決手段】駆動制御装置20は、キャリアに起因する騒音を低減する騒音抑制制御部30として、車速が予め定められた所定速度以下であるか否かを判定する車速判定モジュール31と、動作点が過変調電流制御領域内および特定実施領域内であるか否かを判定する動作点判定モジュール32と、車速が所定速度以下であり且つ動作点が過変調電流制御領域内および特定実施領域内であると判定されたときに、弱め界磁電流を流して動作点を特定実施領域外の正弦波電流制御領域にシフトさせる弱め界磁制御モジュール33と、キャリア周波数変更モジュール34とを有する。
(もっと読む)
可変磁束ドライブシステム
【課題】可変磁束モータを駆動する可変磁束ドライブシステムにあって、可変磁石の磁束の繰り返し精度を改善し、トルク精度を向上する。
【解決手段】永久磁石を用いた永久磁石電動機1と、永久磁石電動機を駆動するインバータ4と、永久磁石の磁束を制御するための磁化電流を流す磁化手段とを備え、永久磁石はその磁束密度がインバータ4からの磁化電流によって可変できる可変磁石であり、磁化手段は、可変磁石の磁性体の磁化飽和領域以上の磁化電流を流すことを特徴とする可変磁束ドライブシステム。
(もっと読む)
モータ制御装置、モータ制御システム、モータ制御プログラム
【課題】運転モードに応じてモータの駆動を高効率で制御可能なモータ制御装置を提供する。
【解決手段】電流指令ベクトルの向きに応じた抑制電流成分によって抑制された後の誘起電圧を電圧検出部で検出される電源電圧Vbatよりも小さくする方向に抑制する第1電流指令ベクトルAvを決定する第1電流指令ベクトル決定部2aと、実測値に基づき予め記憶させている効率情報において回転数検出部で検出した回転数と外部から指示されたトルク指令Trefとに関連付けられた第2電流指令ベクトルAbaseを決定する第2電流指令ベクトル決定部2bとを備え、トルク出力優先モード時は第1電流指令ベクトルAvでモータの駆動を制御し、効率優先モード時は第2電流指令ベクトルAbaseでモータの駆動を制御するように構成した。
(もっと読む)
永久磁石型モータの駆動装置及び圧縮機
【課題】低速運転時及び高速運転の効率改善を両立し、しかも低コストで温度上昇に対しても信頼性の高い永久磁石型モータの駆動装置を提供する。
【解決手段】この発明に係る永久磁石型モータの駆動装置は、インバータを用いて可変速駆動され、回転子の永久磁石に希土類磁石を用いる永久磁石型モータであって、永久磁石型モータは、低速運転時に比べて高速運転時の永久磁石の温度が高くなる環境下におかれ、回転子に配置した永久磁石の残留磁束密度の温度係数が、−0.6〜−0.2[%/℃]の範囲にある永久磁石型モータの駆動装置において、永久磁石型モータの駆動装置は、インバータ制御装置に誘起電圧定数検出部を備え、誘起電圧定数検出部により検出した誘起電圧定数に基づいて、波形生成を行う制御部を備えたことを特徴とする。
(もっと読む)
1 - 20 / 111
[ Back to top ]