
Fターム[5H572LL01]の内容
Fターム[5H572LL01]の下位に属するFターム
アナログ値で検出するもの (12)
デジタル値で検出するもの (67)
ホール素子を用いるもの (10)
速度検出機を用いないで検出するもの (37)
速度検出手段を複数設けるもの (3)
Fターム[5H572LL01]に分類される特許
121 - 130 / 130
電動機制御装置

【課題】昇降圧コンバータなどにおいて定格オーバなどを生じさせない電動機制御装置を提供すること。
【解決手段】エンジンに接続された発電用電動機MG1と車両の駆動軸に接続された駆動用電動機MG2が設けられている。モータコントローラ109は、第1の目標トルク指令に対応した直流電力に変換するように第1のトルク指令を変化させながらインバータ202を制御し、第2の目標トルク指令に対応したトルクを電動機MG2に発生させるように第2のトルク指令を変化させながらインバータ203を制御する。昇降圧コンバータ201は、バッテリ110からの直流電力を昇圧してインバータ203へ供給するとともに、インバータ202で変換された直流電力の少なくとも一部を降圧してバッテリ110へ回生する。モータコントローラ109は、昇降圧コンバータ201の入出力応答性能に応じて、第1のトルク指令および第2のトルク指令の変化率を決定する。
(もっと読む)
電動機制御装置

【課題】 回転位置信号または直線位置信号等の基準位置信号に振動またはノイズが伴う場合であっても、電動機の位置決め精度を向上させることが可能な電動機制御装置を提供する。
【解決手段】 速度検出回路40は、n回目スキャンの基準位置信号とn+1回目スキャンの基準位置信号とから基準速度信号を演算し、速度フィルタ回路41は、基準速度信号の速度群の平均値を演算し、位置生成回路42は、平均速度信号から位置信号に変換してn回目スキャンの第1基準位置演算信号を演算する。そして、第2減算器46は、n回目スキャンの第1基準位置演算信号とn回目スキャンの基準位置信号との位相差を位相補償する。このようにして得たn回目スキャンの第2基準位置演算信号に基づいて、制御軸を駆動する位置指令値を生成し、位置フィードバック信号によって電動機を制御する。
(もっと読む)
ドア駆動制御装置及びドア駆動制御方法
【課題】 同一車両中の全ドアを閉駆動する際に、電源電圧低下によって同一車両に配置された他の機器の動作に悪影響を及ぼさず、また、電源容量を超えてサーキットブレーカが遮断動作しないようにすること。
【解決手段】 ステータス送受信部9dによって、ドアの開閉及び開閉動作状態を示すステータスデータを、ネットワークを介して他のドア駆動制御装置20−2〜20−8との間で送受信する。データ記憶部9aに、ステータス送受信部9dで受信された他ステータスデータ及び自ステータスデータを記憶する。同時動作可能ドア数設定部9bに電源の容量を超えずに同時動作可能なドア数を設定する。データ読書確認制御部9cによって、閉指令信号の受信時に記憶ステータスデータを参照し、自ドアが開状態であって閉動作中の他ドアが設定ドア数未満の場合に、自ドアを閉動作する制御を行う。
(もっと読む)
電動機駆動システム
機械動力発生装置(1〜5)により駆動される複数台の発電機(6〜11)が、共通配電母線(12)に並列接続され、この共通配電母線(12)に接続され、可変振幅及び可変周波数の交流電力を出力する複数台の電力変換装置(61)が、負荷機械(33〜36)を駆動する複数台の電動機(23〜27)を駆動する電動機駆動システムに関する。 特に上記各電力変換装置(61)は、上記各電力変換装置(61)と上記共通配電母線(12)との間でやり取りされる有効電力を制御することにより、上記共通配電母線(12)の周波数を所定値に制御する周波数制御手段を備える。さらに、上記各電力変換装置(61)は、上記各電力変換装置(61)と上記各電動機(23〜27)との間でやり取りされる有効電力を制御することにより、コンバータ(81)の出力直流電圧が所定値になるように制御する直流電圧制御手段を備える。  (もっと読む)
(もっと読む)
電動機駆動システム
複数の交流発電機と、共通配電母線と、複数の電力変換装置と、複数の電力変換制御回路と、複数の交流電動機とを備えた交流電動機の駆動システムである。
1つの実施の形態では、前記複数の電力変換制御回路のそれぞれが、母線周波数検出出力により、対応する前記電力変換装置に対する速度指令を補正した補正速度指令に基づいて対応する交流電動機に対する電流指令を発生する。
別の実施の形態では、前記複数の電力変換制御回路のそれぞれが、母線周波数検出出力により、対応する交流電動機に対する速度指令の上限値を調整した速度上限値調整以下の範囲において、交流電動機に対する速度指令を発生する。 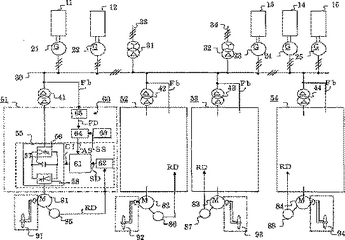 (もっと読む)
(もっと読む)
モータ制御装置
【課題】 小負荷領域に限らず広範囲でモータの運転効率を向上することができるモータ制御装置を提供するものである。
【解決手段】三相電機子巻線5U,5V,5W、三相電機子巻線5R,5S,5Tを備えたモータMを第一インバータ3、第二インバータ4により駆動するモータ制御装置であって、要求運転状態に応じて第一インバータ3、第二インバータ4を切り替えることを特徴とする。
(もっと読む)
モータ制御装置
【課題】 1つのCPUで複雑かつ高速な演算処理を必要とすることなく複数台のモータを制御すると共に、配線の簡略化を可能とし、これによって製造コストを下げること。
【解決手段】 各モータ4a〜4nが駆動時に位置(又は速度)検出器5a〜5nによって位置(又は速度)で検出し、この検出信号12a〜12nをもとに、CPU1で、インバータ3a〜3nが出力すべき電圧の振幅と位相を求められ、この結果に応じた電圧振幅指示信号11a〜11n及び電圧位相指示信号13a〜13nを各PWM発生回路2a〜2nへ出力する。PWM発生回路2a〜2nでは、それらの電圧振幅指示信号11a〜11n及び電圧位相指示信号13a〜13nをもとに、PWM信号14a〜16a…14n〜16nを生成し、これらをインバータ3a〜3nへ入力して各インバータ3a〜3nで各モータ4a〜4nの駆動回転数を制御する。
(もっと読む)
リニアアクチュエータ
【課題】 一対のリニアモータのスライダ間をアーム部材で結合するリニアモータで発生する各モータ間の位置誤差を補正して高精度の位置決め制御を可能とするリニアアクチュエータを実現する。
【解決手段】 位置検出手段を備えた一対のリニアモータのステータを所定距離を隔てて平行に配置し、前記リニアモータのスライダ間をアーム部材で結合したリニアアクチュエータにおいて、
前記一対の位置検出手段の出力の和に基づき前記スライダ間の中点位置信号を算出する中点位置検出手段と、
前記一対の位置検出手段の出力の差に基づき前記スライダ間の位置誤差信号を算出する位置誤差検出手段と、
前記中点位置信号と目標位置信号との偏差に基づく推力指令によりドライバを介して前記リニアモータのスライダを駆動する中点位置制御手段と、
前記位置誤差信号を演算した補正信号を前記推力指令に差動的に重畳させる姿勢制御手段と、
を備える。
(もっと読む)
省電力電動アクチュエータ
【課題】モータ出力による消費電力を省略できる省電力電動アクチュエータを提供する。
【解決手段】駆動に要する負荷トルクが小さく、迅速に動かしたい場合、制御回路13の指令と切換回路14の制御によりモータドライバー12によりモータ2の回転数が上昇される。この時、昇降機は出力されたモータトルクで出力駆動される。つぎに、大きい負荷トルクでゆっくり昇降機を作動させる場合、制御回路13の指令によりまずモータ2が特性線に沿って減速される。すなわち、回転検出器16よりフィードバックされた回転数にて、モータ1、2の駆動が、制御回路13の指令と切換回路14の制御によりモータドライバー12よりモータドライバー11に切換えられる。
(もっと読む)
駆動制御装置と制御方法及び画像形成装置
【課題】 回転体駆動もしくは回転体を介して駆動されるベルト駆動系に付加し、駆動系の負荷トルクや張力を制御するための駆動制御装置を提供する。
【解決手段】 回転機構8もしくはこの回転機構を介して駆動されるベルト機構1と、前記回転機構8もしくはベルト機構1を駆動する第1の電動機5と、所定の目標速度もしくは目標位置に応じて前記第1の電動機5を制御する第1の制御部13とこの第1の制御部13からの出力に応じて第1の電動機5を駆動する第1のモータドライバ14から構成される駆動制御装置において、前記回転機構8もしくはベルト機構1に前記第1の電動機5とは異なる駆動力を伝達する第2の電動機6を備えるようにした。
(もっと読む)
121 - 130 / 130
[ Back to top ]