
Fターム[5H607AA14]の内容
電動機、発電機と機械的装置等との結合 (43,013) | 目的 (3,364) | 調整、調節 (284)
Fターム[5H607AA14]の下位に属するFターム
人力、手動によるもの (20)
Fターム[5H607AA14]に分類される特許
1 - 20 / 264
駆動装置
エネルギー貯蔵装置
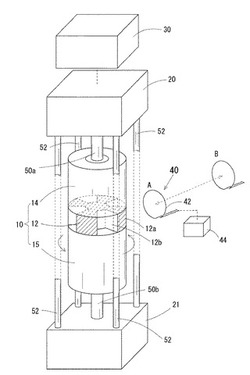
【課題】環境によって大きく変動する利用可能なエネルギーを、可能な限り有効に運動エネルギーとして貯蔵し、必要に応じて磁気エネルギーを媒体として非接触給電できるエネルギー貯蔵装置を提供する。
【解決手段】一対あるいは複数対の永久磁石14、15を、軟磁性材からなる歯車形のスペーサ部材12を端面間に介在させ、対向配置として一体形成した磁界発生モジュール10と、コイル部材として空心コイル42を有する電力回収モジュール40とを備え、磁界発生モジュール10は、回転中心軸11の回りに回転自在に支持され、貯蔵したいエネルギー源を用いて駆動部30を介して回転させ、空心コイル42は、磁界発生モジュール10から発生する交流磁界と鎖交する配置として、スペーサ部材12に近接する位置と、スペーサ部材12から離隔した退避位置との間において移動可能に設けられていることを特徴とする。
(もっと読む)
駆動装置

【課題】複数のモータを有する駆動装置において、全てのモータのロータの位相を簡単に揃える技術を提供する。
【解決手段】駆動装置300は、ギアユニット7と複数のモータ52を備えている。ギアユニット7は、支持部材8に支持されている複数のインプットシャフト32と、複数のインプットシャフト32が係合している被駆動部材26を備えている。夫々のモータ52のロータ44が、夫々インプットシャフト32に取り付けられている。夫々のモータ52のステータ46が、支持部材8と着脱可能なハウジング50に取り付けられている。ハウジング50が支持部材8に固定されているときに、ロータ44の位相角が全てのモータ52で等しい。
(もっと読む)
回転電機
【課題】フィードバック制御とそのための相対角度検出を不要とし、2組の界磁磁極部の相対角度を直接目標値に正確に調整でき、さらなる広範囲高効率運転が達成できる可変界磁式の回転電機を提供する。
【解決手段】固定子巻線と固定子鉄心を設置した固定子と、界磁用磁石が設置された複数の磁極部が2組に分かれて相対的に回動する回転子と、2組の磁極部を相対的に回動する機構を有する回転電機において、前記機構は、シャフトに対して回動する磁極部を支持する部材とねじ嵌合し、シャフトの外側を軸方向に移動自在な部材と、前記軸方向に移動自在な部材を軸方向に移動させるための送りねじ機構と、前記送りねじ機構と回転子とともに回転する部材を連結するベアリングと、前記送りねじ機構を回転させる制御モータとを有することを特徴とする回転電機。
(もっと読む)
減速機組み込み部構造、組み込み方法、および偏心揺動型の減速機
【課題】偏心揺動型の減速機を複数の産業機械に組み込んだときの各産業機械間に発生する個体差を、低コストで効果的に抑制する。
【解決手段】内歯歯車2と、該内歯歯車2に内接噛合しながら揺動回転する外歯歯車4、5とを有する偏心揺動型の減速機G1(G1a、G1b … )が組み込まれる複数のロボット(産業機械)の、該減速機組み込み部の構造であって、内歯歯車2に外歯歯車4、5を組み付けた当初の噛合部P1、P2の位置が、当該減速機G1a、G1b、… の組み込まれるロボットの特定の部位に対して、前記複数のロボットに共通の特定の位相関係を有するように、マークM1、M2を付した上で該減速機G1a、G1b、… が前記複数のロボットにそれぞれ組み込まれる。
(もっと読む)
磁気カップリング及び撹拌装置
【課題】被回転体と回転体との間の軸心に沿った相互間距離が増大した場合にも、継続して非接触で動力を伝達する。
【解決手段】軸心が鉛直方向に沿う態様で配設した出力軸1と、出力軸1の延長上に配置した被駆動軸2との間に、反発用磁石ユニット40及び吸引用磁石ユニット30を配設し、反発用磁石ユニット40の反発力により出力軸1に対して被駆動軸2を浮上させた状態に維持するとともに、吸引用磁石ユニット30の吸引力により出力軸1と被駆動軸2との間に非接触で回転力を伝達するようにした磁気カップリングにおいて、出力軸1と被駆動軸2との間の軸心に沿った相互間距離Dが予め設定した閾値よりも小さい場合に反発力が吸引力を上回り、かつ相互間距D離が閾値を超えて増大した場合に吸引力が反発力を上回るようにそれぞれの磁力を設定した。
(もっと読む)
振動装置および振動装置の運転方法
【課題】吊り下げられる線材コイルの重量等が異なる場合でも安定した振動が得られる振動装置を提供する。
【解決手段】それぞれエアーバネ4,4に支えられた左右の受け台7a,7bと、左右の受け台7a,7bに掛け渡し状に載せられる線材コイル10吊り下げ用のフック9と、フック9に振動を与える振動体16aを備え、左右の受け台7a,7bには、それぞれ受け台の高さを検出するセンサーが設けられ、センサーを介し左右それぞれのエアーバネ4,4の空気注入による膨らみ高さを制御して、フック9の線材コイル受け面9dが水平となるように調整する空気圧制御手段17が備えられている。
(もっと読む)
発電方法
【課題】回転する円材の回転力を利用した発電方法の提供を目的としたものである。
【解決手段】発電設備二以上を稼働させ、該稼働させた二以上の発電設備のうち、一以上の発電設備には電力の生産および供給側を受け持たせ、残る一以上の発電設備には再度の電力生産および供給をするための準備側を受け持たせることにより、該二以上の発電設備の交互稼働により電力の生産および供給をする発電方法である。
(もっと読む)
モータ及び製氷装置
【課題】従来に比して駆動軸の延長方向の長さを短くすることができ、さらには従来に比して信頼性を向上することができるモータ、このモータを用いた製氷装置を提供する。
【解決手段】モータ本体42の回転軸47の回転速度を減速機43により減速して駆動軸44を駆動する構成において、この減速に供する複数の歯車48〜55を保持するケース56、65の内部に、センサ用空間58を設け、このセンサ用空間58に、駆動軸44の回転位置を検出する構成60、61、62を設ける。
(もっと読む)
インバータ付駆動ユニット
【課題】インバータ付駆動ユニットにおいて、ケースの加振力を抑制し、不快な騒音の抑制を図ることである。
【解決手段】インバータ付駆動ユニット57は、駆動ユニットケース60内に設ける第1モータジェネレータ16及び第2モータジェネレータ20と、駆動ユニットケース60に固定するインバータユニット68とを含む。第1モータジェネレータ16を構成する第1回転軸32は、第2モータジェネレータ20を構成する第2回転軸40と平行に配置する。各モータジェネレータ16,20は、ロータ44,52と、ステータ46,54とを有する。ステータ46,54のロータ44,52との間の径方向内側の円筒状ギャップの厚さのうち、インバータユニット68側のギャップの厚さが最小となるように、ステータ46,54をロータ44,52に対し偏心して対向配置する。
(もっと読む)
回転体用の分割型チューニングリング
【課題】機械加工とともに作業の容易なねじり周波数調整手段を提供する。
【解決手段】分割型チューニングリング100は、回転体104の第1の部分106と第2の部分108とを互いに結合するフランジ継手102に取り付けられる。分割型チューニングリング100は、回転体104の振動数を調整する。分割型チューニングリング100は、回転体104が機械内の動作位置にあるとき、回転体104上にボルト締めすることができ、したがって、回転体104を機械から取り外す必要がなくなる。
(もっと読む)
可変界磁回転電機
【課題】2組の界磁磁極部の相対角度を正確に検出することで、さらなる広範囲高効率運転が達成できる可変界磁回転電機を提供できるようにする。
【解決手段】固定子巻線12と固定子鉄心13を設置した固定子10と、界磁用磁石が設置された回転子30と、前記回転子30の回転位置検出器25と、を有する回転電機において、相対的に回動する2組の界磁磁極部46,47の各々に回転位置検出のための信号発生手段を設けたことを特徴とする可変界磁回転電機。
(もっと読む)
アクチュエータ装置およびこれを用いるロボット装置
【課題】動力停止時には外力により関節等を容易に動かすことができ、定常的に大きな負荷が作用した場合にも効率を損なわず、アクチュエータ自体を湾曲設置可能として柔軟に配置できるようにしたアクチュエータ装置およびロボット装置を提供する。
【解決手段】モータの回転を線方向の動作に変換するアクチュエータ装置において、モータに直接または間接的に接続されて回転する回転基部(12または15)と、前記回転基部の回転軸上でスライド可能に設けられた摺動基部(15または16)と、前記回転基部とともに回転し遠心力で外側へ移動可能な1以上の錘部材(14)と、前記錘部材と前記回転基部および摺動基部をそれぞれ回動可能に連結する2本のリンク棒を有し、前記遠心力を利用して前記回転基部と摺動基部間の距離を変更するリンク機構(13)とを有するユニットを1以上設けて構成する。
(もっと読む)
二重駆動電動機械
【課題】 入出力端と負荷との離脱のときの動力損失を低減する二重駆動電動機械を提供する。
【解決手段】 遊星歯車列(DG101)と結合させ、及び制御可能な制動装置によってクラッチ装置を構成し、制御可能な制動装置の操作を通して、ブレーキロックまたはリリースすることにより、遊星歯車列(DG101)の入出力端の回転軸(S101)と入出力端の回転軸(S102)と入出力端のスリーブ回転軸(AS101)の三者を作動させ、駆動を連結または離脱させ、及び二重駆動電動機械(EM100)と入出力端との間を稼動させる。
(もっと読む)
インホイールモータ駆動装置
【課題】 モータおよび減速機を含むインホイールモータユニットの過負荷状態を簡易に判断できて、インホイールモータユニットの最適な状態で車両を駆動することができ、モータや減速機の信頼性が確保できるインホイールモータ駆動装置を提供する。
【解決手段】 車輪用軸受A、モータB、およびこのモータBと車輪用軸受Aとの間に介在した減速機Cを有し、上記モータBの駆動を制御するコントローラ51を設けたインホイールモータ駆動装置とする。上記車輪用軸受A、モータB、および減速機CからなるインホイールモータユニットUの振動を検出する振動センサ58を設ける。この振動センサ58で測定された振動情報に応じて、上記モータBの駆動電流を制限し、またはモータ回転数を低下させる振動対応モータ制御手段59を設ける。
(もっと読む)
永久磁石形回転電機のロータ及びそのバランス調整方法
【課題】切削加工を伴うことなく、バランス調整を適正に行うことができる永久磁石形回転電機のロータ及びそのバランス調整方法を提供する。
【解決手段】永久磁石形回転電機のロータ4は、永久磁石を保持したロータコア13と、該ロータコア13の軸方向の少なくとも一端部に装着され、バランス調整用ウェイト21をカシメ固定可能な複数の突起20を有するバランスリング16とを備えている。少なくとも、突起20にバランス調整用ウェイト21を装着するか突起20を切断することによりバランス調整を行う。
(もっと読む)
差動変速機、変速機およびこの変速機を搭載した車両
【課題】トルクを機械的に制御して伝達することにより、さらに効率的な動力伝達を可能としエネルギーの損失を可及的に抑えることができる差動変速機、変速機およびこの変速機を搭載した車両を提供する。
【解決手段】トルク伝達部2Tからの回転力を入力するトルク伝達回転体20と、このトルク伝達回転体20に回転自在に軸支された差動回転体21と、この差動回転体21の一端側に接触し正転方向の動力伝達を行う正転回転体22と、前記差動回転体21の他端側に接触し逆転方向の動力伝達を行う逆転回転体23と、回転伝達回転体25の一端側が正転回転体22に連動連結し他端側が逆転回転体23に連動連結することにより正転伝達系24Fおよび逆転伝達系24Rを形成する回転伝達回転体25と、これら正転伝達系24Fおよび/または逆転伝達系24Rの動力伝達率を調節することによりトルク伝達回転体20から回転伝達回転体25の間で伝達する回転力の大きさを調節可能とする伝達回転力調節部26とを備える。
(もっと読む)
ロボット及びロボットシステム
【課題】ロボットの制御性と安全性とを両立させる。
【解決手段】ロボットは、固定子31及び回転子を有するモータを関節機構S1に備えている。このロボットは、モータの固定子31が連結される第1リンク部材L1と、モータの回転子が連結される第2リンク部材と、モータの固定子31と第1リンク部材との間に設けられた弾性部材30とを有している。そして、この弾性部材30は、磁場によって弾性率が変化する可変弾性ソフトマテリアルで構成されている。
(もっと読む)
電動シリンダ及び電動シリンダシステム
【課題】 荷重検出を可能としながら、構成を簡素化でき、且つ軸方向の長さを縮小して小型化を実現するとともに、電動シリンダを有するシステム構成の柔軟化を実現する電動シリンダを提供する。
【解決手段】 一端側に当該電動シリンダの取付箇所に固定するための固定部を有した外筒体と、前記外筒体の前記一端側の開口から軸方向に伸縮可能とされたロッドと、前記外筒体の他端側であって内部に設けられた軸受と、前記軸受に回転可能に支持されるとともに、電動機の駆動力により回転駆動される回転軸と、前記回転軸の回転運動を前記ロッドの直線運動に変換して伝達するねじ機構と、前記外筒体の外周であって前記軸受が設けられた位置と前記固定部との間の位置に設けられる歪検出部とを備える。
(もっと読む)
電動シリンダシステム
【課題】 荷重検出及び位置検出を可能としながら、システム構成を簡素化でき、且つ小型化を実現する電動シリンダシステムを提供する。
【解決手段】 電動シリンダと、前記電動シリンダを制御する制御手段とを備え、前記電動シリンダは、外筒体と、前記外筒体の一端側の開口から軸方向に伸縮可能とされたロッドと、前記外筒体の内部に設けられた軸受と、前記軸受に回転可能に支持されるとともに、電動機の駆動力により回転駆動される回転軸と、前記回転軸の回転運動を前記ロッドの直線運動に変換して伝達するねじ機構と、前記ロッドに加わる軸方向の荷重を、前記ロッドからねじ機構を経由して伝達された位置で検出する荷重検出手段とを有し、前記制御手段は、前記電動機のエンコーダからの信号と、前記荷重検出手段からの信号に基づいて前記電動シリンダを制御する。
(もっと読む)
1 - 20 / 264
[ Back to top ]