
Fターム[5H621GA15]の内容
永久磁石型同期機 (15,058) | 固定子鉄心の形状、構造 (3,659) | 磁極 (1,115) | 極弧角を特定しているもの (112)
Fターム[5H621GA15]に分類される特許
1 - 20 / 112
モータ
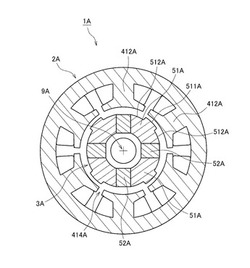
【課題】フェライトマグネットを放射状に配置し、コギングトルクを低減できる構造を得る。
【解決手段】このモータ1Aの回転部3Aは、複数のコアピース51Aを有するロータコアと、複数のマグネット52Aと、を有する。複数のコアピース51Aと、複数のマグネット52Aとは、周方向に交互に配列されている。また、コアピース51Aの径方向外側の面は、小径面512Aと、小径面より中心軸からの距離が大きな大径面511Aと、を有している。このような構成を採用すれば、大径面511Aの広がりと配置を適切に設定するのみで、コギングトルクの小さなモータを得ることが出来る。また、大径面511Aは、中心軸に直交する断面において、中心軸を中心とする円弧となっている。このため、大径面の全体を、ティース412Aに接近させることができ、ティース412Aと大径面511Aとの間の磁束密度を、高めることができる。
(もっと読む)
電磁装置

【課題】発電機またはモータのロータの位置を決定するための電磁装置が提供される。
【解決手段】電磁装置は、ボア21を画成するステータ20と、ステータ20のボア21内で回転可能なロータ30であって、磁極34の列を画成するようにロータ30の外面32の周りに配置された永久磁石部材33を有するロータ30と、電力コイル50であって、ロータ30の回転に起因して磁極34の第1の部分が電力コイル50のそれぞれを横切る際に、電力電流を生成するように構成された電力コイル50と、検出コイル60であって、ロータ30の回転に起因して磁極34の第2の部分が検出コイル60のそれぞれを横切る際に、検出電流を生成するように構成された検出コイル60と、を備える。直流(DC)出力を生成するシステム75は、上述した電磁装置10を備えており、さらに、駆動装置80と、処理装置90と、整流器100とを備えている。
(もっと読む)
電動回転機
【課題】スキュー角度以外の条件を検討して、トルクの低下を抑えつつ、トルクリプルを低減させて、振動や騒音の少ない高品質で高効率な回転駆動をすることのできる電動回転機を提供すること。
【解決手段】固定子11は、回転子12に対面する複数本のティース15と、コイルをティースに巻き掛ける空間の複数のスロット18とを有し、回転子には、ティースに磁気力を働かせる一対の永久磁石16がV字に埋め込まれることにより、固定子内の回転子をリラクタンストルクとマグネットトルクにより回転駆動させる電動回転機10であって、回転子は軸方向に分割されて個々の相対位置を周方向に変位させるスキューが施されており、回転子の外径Drの固定子の外径Dsに対する外径比率Δが、0.645以上、好ましくは、0.655〜0.67の範囲内に入るように回転子および固定子を作製する。
(もっと読む)
電動回転機
【課題】トルクの低下などを招くことなく、トルクリプルを低減させて、振動や騒音の少ない高品質な回転駆動をすることのできる電動回転機を提供すること。
【解決手段】固定子11は、回転子12に対面する複数本のティース15と、コイルをティースに巻き掛ける空間の複数のスロット18とを有し、回転子には、ティースに磁気力を働かせる一対の永久磁石16がV字に埋め込まれることにより、固定子内の回転子をリラクタンストルクとマグネットトルクにより回転駆動させる電動回転機10であって、回転子の外径Drの固定子の外径Dsに対する外径比率Δが、0.61〜0.645の範囲内に入るように回転子および固定子を作製する。
(もっと読む)
電動車両用駆動モータ
【課題】低速回転域で所定のトルクを確保し高速回転域で逆起電力の発生を低減すると共に、低速回転域および高速回転域で電流の流れるタイミングを適正に設定できるようなシンプルな構成の電動車両用駆動モータを提供する。
【解決手段】電動車両用駆動モータは、2n個の磁極を有するマグネットを備えるロータ、ロータの各磁極に対向し周面に6m個の突起部が有するステータコア24、回転検出部、電流制御部、駆動回路を含む。ステータコア24は周方向に等間隔で形成される3m個の第1突起部群と3m個の第2突起部群とを含み、第1突起部群を構成する第1突起部36と第2突起部群を構成する第2突起部38とが交互に配置される。第1突起部36には第1コイルが巻回され、第2突起部38には第2コイルが巻回される。第2突起部群と第1突起部群とは、第2突起部38が当該第2突起部38を挟む2つの第1突起部36のうち一方に偏って配置される。
(もっと読む)
ブラシレスモータ制御方法及びブラシレスモータ制御装置並びにブラシレスモータ並びに電動パワーステアリング装置
【課題】d軸方向とq軸方向のインダクタンスに差があるモータにおいて、高負荷側のトルクだれを防止し、モータのトルク向上や小型化を図る。
【解決手段】ブラシレスモータ3は、多角形状の断面を有するロータコアと、ロータコアの外周の各辺部分に取り付けられたセグメントマグネットとを備えるロータコアを有し、d軸方向のインダクタンスとq軸方向のインダクタンスが異なる。ブラシレスモータ3の制御装置50は、電流センサ61と、負荷状態に応じて巻線電流値を算出する電流指令部51とを有する。電流指令部51は、電流センサ61にて検出した相電流値に基づいて、電機子反作用の影響によって理論トルクに対して出力トルクが減少する高負荷領域にて進角制御を行い、電機子巻線に対する供給電流にd軸電流Id’を付加する供給電流量算出部52と、相電流と進角値との関係が示された進角制御マップ63を有する。
(もっと読む)
ブラシレスモータ
【課題】電気モータ、特に、ブラシレス直流モータを提供する。
【解決手段】ブラシレスモータは、固定子と外側回転子を有する。固定子は、6Nの歯及びそれぞれ歯の周りに巻かれた6Nのコイルを有する固定子コアを含み、Nは、1に等しいか又はそれよりも大きい整数である。回転子は、6N±2の永久磁石を含む。永久磁石は、固定子コアの周りに周方向に配置され、かつ空隙を横切って歯に面している。空隙の半径方向厚みは、モータの円周方向に沿って不均一である。
(もっと読む)
ブラシレスモータ
【課題】ステータ側マグネットを安定して保持させることが可能なブラシレスモータを提供する。
【解決手段】ロータ側のスロット数=ステータ側のスロット数±巻線の極対数となるように設定されたブラシレスモータ(バーニアモータ)において、ステータ側マグネット34の径方向のロータ側端面(内側端面)を少なくとも保持する保持部36と、ステータコア31と軸方向に当接する連結部37とが一体成形されてなる非磁性体からなるマグネットホルダ35を備える。
(もっと読む)
アキシャルギャップ回転電機のロータ
【課題】回転電機全体の単位体積あたりの出力トルクを向上する。
【解決手段】アキシャルギャップ型の回転電機を構成するロータ300は、ロータ300の周方向に沿った磁極方向を有し、ロータ300の周方向に沿って間隔をおいて配置された複数の第1の永久磁石部323と、周方向に隣り合う第1の永久磁石部323の間にそれぞれ配置され、ギャップ面を形成する複数のコア部324と、回転軸方向に沿った磁極方向を有し、周方向に隣り合う第1の永久磁石部323の間であって各コア部324のギャップ面とは反対側にそれぞれ配置された複数の第2の永久磁石部322とを備える。周方向に隣り合う前記第1の永久磁石部323は互いに磁極方向が反対である。第2の永久磁石部322は、各コア部324から見て周方向の両側に配置された第1の永久磁石部323が各コア部324に対して向けている磁極と同じ磁極を各コア部324に対して向けている。
(もっと読む)
永久磁石型回転電機及び電動パワーステアリング装置
【課題】回転子側のばらつきに起因するコギングトルク成分を低減できる永久磁石型回転電機を得る。
【解決手段】多角形の回転子コア11及び複数の永久磁石15を有する回転子10と、固定子コア21及び電機子巻線25を有する固定子20とを設けた永久磁石型回転電機において、極数をM、スロット数をNとし、M個の永久磁石を周方向に順番に1番目からM番目までとし、i番目(i=1,2,…,M)の永久磁石における、回転軸の中心から径方向で等距離かつ周方向で等間隔である基準位置からの周方向の位置ずれ量をhiとしたとき、2πN(i−1)/M(rad)の角度方向の合計M個の単位ベクトルを定義し、それぞれの単位ベクトルに、位置ずれ量hiを乗じた合計M個のベクトルの総和のベクトルの大きさが、位置ずれ量hiの絶対値の最大値よりも小さい。
(もっと読む)
アキシャルギャップ型電動機
【課題】さらなるトルクの増大を実現するアキシャルギャップ型電動機を提供する。
【解決手段】極固定側磁極片は、出力軸に同軸の円周方向に配列されて、出力軸に同軸の円周方向に交互にN極およびS極を形成する極固定側対向面を配置する。極遷移側磁極片は、円周方向に配列されて、極遷移側対向面42で極固定側磁極片に向き合いつつすれ違う。極遷移側対向面42で磁極は変遷する。第1仮想平面に平行な第3仮想平面に投影される極固定側対向面の投影像の電気角と、第3仮想平面に投影される極遷移側対向面42の投影像の電気角とは、出力軸に同軸の円周線上で有効磁束の最大値を確立する数値関係に設定される。
(もっと読む)
ブラシレスモータ及びブラシレスモータの駆動方法
【課題】電気角6次及び電気角12次の両成分のトルクリップルを低減させることができるブラシレスモータ及びブラシレスモータの駆動方法を提供する。
【解決手段】ロータコア16は、軸線方向に2つ等分割して分割ロータコア16a,16bを形成した。そして、ロータコア16の磁極とステータの磁極(ティース9)との間で、電気角60度の磁気スキューが保たれているように、分割ロータコア16a,16b間をそれぞれ回転軸の中心軸線を回転中心に6度だけ一方向にずらすように配置した。これによって、ブラシレスモータに発生する電気角12次成分のトルクリップル波は消失させることができる。また、ステータは、2つの異なる3相巻線を電気角で30度のスロットピッチで巻回する。そして、その2つの異なる3相巻線に対して30度位相差をもって通電する。
(もっと読む)
正逆回転可能なDCブラシレスモータ
【課題】3相以上のブラシレスモータを正逆回転させるよりも制御が容易でかつ安価な、ブラシ及び整流子を用いることなく直流電流で正回転、逆回転の双方向に回転する単相全波整流型又は2相半波整流型DCブラシレスモータを提供する。
【解決手段】上記課題を解決するため、回転子である磁石の極位置を検出する位置センサを備え、前記位置センサの磁極検出信号の出力によりスイッチング素子のオンオフを制御し、ステータに巻かれたコイルへの通電方向を変更する単相全波整流型又は2相半波整流型DCブラシレスモータにおいて、前記位置センサから前記スイッチング素子を制御する回路へ入力する2つの磁極検出信号を入れ替えることで、前記回転子を逆回転させることを特徴とする正逆回転可能なDCブラシレスモータの構成とした。
(もっと読む)
永久磁石を備えた同期モータ
【課題】本発明は、新規な同期モータを提供するものである。
【解決手段】本発明は、巻き線(U,V,W)が設けられた円筒形ステータの内側に配置された永久磁石(3)を備えている円筒形ロータ(4)を具備した同期モータであり、ロータには巻き線に面した突起(41)が設けられていることを特徴としている。
(もっと読む)
電動機装置
【課題】パーミアンス変化の激しいコンシクエントポール型回転子を採用しても、固定子の振動による騒音を悪化させない電動機装置を提供することにある。
【解決手段】電動機装置は、回転子3の磁極間のパーミアンス変化が大きい部分が通過する固定子側の対向位置での空間磁束変化を滑らかにする電気回路を構成している。すなわち、空間磁束変化が小さくなるように、第1の3相インバータによる通電と、第2の3相インバータによる通電とを独立に制御している。そして、回転子3のパーミアンス変化極大位置(境界位置A、B)のいずれか一方が対向する位置での空間磁束変化と、他方が対向する位置での空間磁束変化とにおいて、脈動の極大位置が同期しないように電流制御されている。これにより、固定子の振動が低減し、振動の増幅も抑えることができる。
(もっと読む)
モータロータ用セグメント磁性片の製造方法
【課題】逆ラジアル磁化配向のセグメント磁性片を簡易かつ安価に製造する
【解決手段】中心から径方向へ延びるラジアル状の磁化配向を有する円環状の磁性体1を得る工程と、当該磁性体1を周方向へ一定長さで分割して磁性原片2を得る工程と、磁性原片2の凹状をなす内周弧面2aを所定の凸状弧面5aに成形してセグメント磁性片5を得る工程とを備える。セグメント磁性片5の外周弧面2b側を、ロータ3の、ステータ4に対向する周面に固定して当該周面の周方向へ必要数のセグメント磁性片5を配置する。
(もっと読む)
永久磁石式回転電機
【課題】本発明の課題は、電気特性,強度特性に優れた永久磁石式回転電機を提供することである。
【解決手段】上記課題を達成するために、本発明の永久磁石式回転電機は、固定子鉄心に形成された複数個のスロット内に電機子巻線が施された固定子と、回転子鉄心中に1極につき2つの磁石挿入孔が回転子外周から見たときV字状に配置され、該磁石挿入孔に永久磁石が1極ごとに極性を変え埋没された回転子とを備え、前記磁石挿入孔の回転子外径側端部壁が異なる曲率を持つ3つの円弧で形成され、3つの内の一つの円弧を回転子外径と平行とし、かつ、前記磁石挿入孔の回転子内径側端部壁を円弧形状としたことを特徴とする。
(もっと読む)
回転機器
【課題】ステータコア形状の最適化を図り、駆動時に生じる振動を低減する回転機器を提供する。
【解決手段】ハブは、記録ディスクが載置される。ベースは、軸受を介してハブを回転自在に支持する。ステータコア60は、ベースに固定され、円環部62とそこから径方向に伸びる突極63とを含む。マグネットは、突極63と径方向に対向し、ハブとともに回転する。マグネットは、突極63と対向するように周方向に複数の磁極を有する。突極63は、ワイヤが巻かれる棒状体64と、棒状体64の径方向外側に設けられ、周方向に延在する歯部66とを有する。歯部66の周方向の端に位置する周端67は、歯部66の径方向最外端に位置する突端69を通る外接円68より径方向内側に位置する。
(もっと読む)
単相交流同期モータおよび単相直流ブラシレスモータ
【課題】単相交流同期モータを、様々な負荷条件下においても正常に動作すること。
【解決手段】磁極数4極のロータマグネット10−1〜10−4と、4極のステータコアティース11−1〜11−4とを有する単相交流同期モータ1において、ロータマグネット10−1〜10−4の磁極ピッチをθ0度、ステータコアティース11−1〜11−4の開き角をθ1度、ロータマグネット10−1〜10−4の着磁角をθ2度とするときに、
θ1=α1・θ0
θ2=α2・θ0
であり、α1,α2のとり得る範囲をそれぞれ
4/9≦α1≦7/9
4/9≦α2≦7/9
とする。
(もっと読む)
モータ
【課題】低振動化を図り、回転性能を向上することができるモータを提供する。
【解決手段】突極24の開角度を「Ykθ(°)」、ティース12の先端部の開角度を「Tθ(°)」、ティース12の個数を「L(個)」として、「Ykθ=Tθ+(a−1)×360(°)/L」(但しaは自然数)を満たすように構成される。
(もっと読む)
1 - 20 / 112
[ Back to top ]