
Fターム[5H680FF33]の内容
超音波モータ、圧電モータ、静電モータ (19,856) | 製造、制御、電源、保護 (2,336) | 電源回路 (889) | 二相 (295)
Fターム[5H680FF33]に分類される特許
41 - 60 / 295
駆動装置、それを備えた撮像装置、及び撮像機器

【課題】駆動装置の低背化を実現する。
【解決手段】本発明の駆動装置は、一部が固定され、電気的制御により屈曲変位が励起される屈曲変位部材91Aと、屈曲変位部材91Aに連結されているとともに、鏡筒4’と接触し、屈曲変位部材91Aの屈曲変位方向と異なる方向に変位方向を変換して鏡筒4’を駆動する駆動方向変換部材99とを備え、駆動方向変換部材99に対し鏡筒4’を付勢する予圧バネ98と、屈曲変位部材91Aの屈曲変位を制御する制御手段とを備えているので、駆動装置の小型化・低背化を実現することができる。
(もっと読む)
振動アクチュエータ、レンズ鏡筒及びカメラ

【課題】簡単な構造で温度上昇を低減可能な振動アクチュエータを提供する。
【解決手段】本発明の振動アクチュエータは、電気機械変換素子(12)の励振により振動波を生じる振動子(11)と、前記振動子(11)に加圧接触されて前記振動波によって駆動され、前記振動子(11)に対して相対移動する移動子(15)と、前記移動子(15)の相対移動に連動して送風を行う送風手段(30)と、を備えること、を特徴とする。
(もっと読む)
振動アクチュエータ、レンズ鏡筒および撮像装置
【課題】小型で効率的な交互送り振動アクチュエータを提供する。
【解決手段】移動対象に当接する先端部、および、移動対象に近接離間する縦方向に伸縮する電気機械変換素子をそれぞれ有する一対の縦駆動部と、一対の縦駆動部を縦方向に交差する横方向に並べて弾性的に支持する支持部と、一対の縦駆動部の間に挟まれ、横方向に伸縮する電気機械変換素子を有する横駆動部とを備える振動アクチュエータが提供される。横駆動部は、支持部により支持される一対の縦駆動部の支持位置に対して前記先端部と反対側で一対の縦駆動部に挟まれてもよい。
(もっと読む)
超音波モータ
【課題】拡がり振動モードと曲げ振動モードとを組み合わせた多重振動モードで駆動される超音波モータにおいてコンパクトな構成で駆動の効率的な検出および制御を可能にする超音波モータを提供する。
【解決手段】多重振動モードの振動に用いられる矩形の超音波モータであって、積層された圧電層と、積層された圧電層間に交互に内層された駆動電極4dおよびグランド電極と、積層された圧電層のうち駆動検出に用いられるものの一方の主面側で、駆動電極が内層された面内に内層されたセンシング電極4eとを備え、二組の辺のうち、一方の組の辺の長さをLとし、他方の組の辺の長さをwとしたとき、拡がり振動の共振周波数と曲げ振動の共振周波数とが実質的に同一となるw/Lの値に基づいて形成されている。これにより、圧電活性層の比率が大きく、効率のよい高性能の超音波モータを提供できる。
(もっと読む)
振動アクチュエータの制御装置
【課題】 従来の振動アクチュエータの制御装置では、調整時において、振動アクチュエータを低速で回転させた場合、回転ムラや負荷トルクのムラにより振動アクチュエータが途中で止まってしまい、振動アクチュエータの調整が行えないという問題があった。
【解決手段】 フィードバック制御手段により、予め設定された目標回転数に対応すると推定される周波数fの駆動信号Sa、Sbによって超音波モータ9が駆動され、速度検出器10で計測される回転数Nを目標回転数にするフィードバック制御が行われる。また、特性決定手段により、目標回転数が駆動信号Sa、Sbの複数の周波数帯域で設定されて、複数の目標回転数付近における超音波モータ9の駆動周波数fと回転数Nとの相関特性が計測されて、実際の相関特性が決定される。このため、調整時において、超音波モータ9がほぼ一定の回転数Nで回転する。
(もっと読む)
振動型モータ制御装置
【課題】 駆動速度を駆動信号位相差によって制御する振動型モータの制御装置において、共振周波数の変動やばらつきによって起こり得る大きな速度駆動を抑える制御をより簡単に行うための構成を提供する。
【解決手段】 圧電体に対して位相の異なる2つの駆動信号A相、B相が印加されことによって圧電体が振動して駆動力が発生する振動型モータの制御装置であって、駆動信号位相差θkを制御する位相差制御手段を有し、位相差制御手段は、振動型モータの駆動速度を変化させる場合に、第1の方向に駆動する場合には0度以上90度以下の範囲を、第1の方向とは反対の第2の方向に駆動する場合には180度以上270度以下の範囲を、駆動信号位相差θkを変化させる範囲とする、または第1の方向に駆動する場合には90度以上180度以下の範囲を、第2の方向に駆動する場合には270度以上360度以下の範囲を、駆動信号位相差θkを変化させる範囲とする。
(もっと読む)
振動型アクチュエータ
【課題】電極層の種類を減らす。
【解決手段】超音波アクチュエータ2は、圧電体層41,41,…とプラス及びマイナス電極層5,6とを交互に積層させて構成されたアクチュエータ本体4を備えている。プラス電極層5は、第1〜第4プラス分割電極51A〜54Bと、第1及び第3プラス分割電極51A,53Aを接続するプラス対角接続電極55Aとを有する。第2及び第4プラス分割電極52B,54Bは、プラス電極層5の外部で接続されている。マイナス電極層6は、第1〜第4マイナス分割電極61A〜64Bと、第1及び第3マイナス分割電極61A,63Aを接続するマイナス対角接続電極65Aとを有する。第2及び第4マイナス分割電極62B,64Bは、マイナス電極層6の外部で接続されている。
(もっと読む)
超音波モータ
【課題】単一の部材からなり、構造が単純であり、溝部等が不要であり、縦振動とねじれ振動を容易に励起することができ、縦振動とねじれ振動を合成することにより楕円振動を形成し、楕円振動によりロータを回転させる超音波モータを提供する。
【解決手段】振動子の回転軸方向に伸縮する縦1次共振振動と、回転軸をねじれ軸とするねじれ2次共振振動又はねじれ3次共振振動とを合成することにより、楕円振動を形成してなり、振動子の回転軸方向に伸縮する縦1次共振振動と、回転軸をねじれ軸とするねじれ2次共振振動又はねじれ3次共振振動と、の共振周波数がほぼ一致するように、振動子の矩形状の長さ比率を設定し、振動子は、複数の圧電シートからなり、圧電シートの厚み方向に分極されてなる活性化領域により、縦1次共振振動と、ねじれ2次共振振動又はねじれ3次共振振動と、を発生する。
(もっと読む)
振動アクチュエータ駆動装置、レンズ鏡筒、及び、光学装置
【課題】振動アクチュエータの製造ばらつきによる消費電力の増加を抑制する振動アクチュエータ駆動装置を提供する。
【解決手段】アクチュエータ駆動装置(10)は、所定の周波数を有する発振信号を生成する発振部(11)と、前記発振部が生成した前記発振信号を増幅し、該増幅した信号を駆動信号として前記振動アクチュエータに印加する増幅部(13)と、前記振動アクチュエータに印加された前記駆動信号の電圧を検出する電圧検出部(14)と、前記電圧検出部により検出された電圧が予め定められた電圧になる増幅率を算出して前記増幅部の増幅率を算出した増幅率に変更する制御部(17)とを具備する。
(もっと読む)
圧電アクチュエータ、レンズ鏡筒及びカメラ
【課題】圧電体の電極に対する改良された電気配線を有する圧電アクチュエータを提供する。
【解決手段】本発明の圧電アクチュエータ10は、互いに対向する第1の面11Fと第2の面11Rとを有する凹部11が形成されたベース部材10と、前記凹部11内に配置された際に、前記第1の面11Fと前記第2の面11Rのそれぞれに対向する第3の面31Fと第4の面31Rとを有する駆動部材と、前記第3の面31Fと前記第1の面11Fとの間に配置された第1の圧電体33F、及び前記第4の面31Rと前記第2の面11Rとの間に配置された第2の圧電体33Rと、前記ベース部材10の表面に形成され、前記第1の圧電体33Fと前記第2の圧電体33Rとを電気接続する導電材料40と、前記第1の圧電体33F及び前記第2の圧電体33Rへの電力供給を行う電源と前記導電材料40とを接続する電気配線45と、を備えることを特徴とする。
(もっと読む)
超音波モータ
【課題】駆動時における異音の発生を低減させた超音波モータを提供すること。
【解決手段】被駆動体5に当接する駆動子10を備える超音波振動子4に2相の駆動信号を印加して縦振動と屈曲振動とを同時に発生させることで、前記超音波振動子4に楕円振動を発生させ、該楕円振動から駆動力を得て前記駆動子10により前記被駆動体5を摩擦駆動する超音波モータを、次のように構成する。すなわち、制御CPU22は、前記2相の駆動信号の位相差である駆動位相差を切り替えて駆動する際に、駆動位相差の切り替えの周期を変化させるよう駆動位相差の切り替えタイミングを制御する。
(もっと読む)
超音波モータ
【課題】セルフセンシング方式の超音波モータにおいて低コスト化および小型化を図る。
【解決手段】駆動信号に応答して圧電素子が高周波振動を行う振動体12に移動体13が加圧接触して回転し、それらの接触部に溝等の振動状態を変化させる部分を周期的に形成し、その部分の通過による振動状態の変化を検出回路31が検出することでセンサレスを実現する超音波モータ1において、信号変換器32が検出電極の検出電圧の駆動信号に対する位相の変化から前記部分の通過に伴う脈動波形を生成し、その脈動波形から帯域フィルタ33が脈動成分を抽出し、カウンタ35がカウントすることで、回転位置と回転速度との少なくとも一方の検出を可能にする。そして、帯域フィルタ33の遮断周波数を、周波数設定器36が駆動信号の周波数に応じて変化することで、加圧力のムラにより脈動成分に1回転毎に周期的に現れる交流成分を除去する。こうして、組立て精度を緩和する。
(もっと読む)
振動アクチュエータ及び電子機器
【課題】好適な特性を有する振動アクチュエータ及び電子機器を提供する。
【解決手段】本発明の振動アクチュエータ10は、相対移動部(13)と接触し、前記相対移動部(13)の相対移動に必要な振動をする振動部(12)と、前記相対移動部(13)を前記振動部(12)との間に挟むように備えられ、前記振動部(12)に対する前記相対移動部(13)の移動に応じて前記振動部(12)に対して相対的に移動する第1部材(22)と、転動部材(23)を介して前記第1部材(22)と対向し、前記第1部材(22)が前記振動部(12)に対して相対的に移動可能なように前記第1部材(22)を支持する第2部材(21)と、前記振動部(12)と前記相対移動部(13)とが接触するように、前記第2部材(21)と前記振動部(12)との間に加圧力を生じさせる加圧部材(15)とを含み、前記第1部材(22)は、可塑性物質を含有することを特徴とする。
(もっと読む)
超音波モータの駆動回路装置
【課題】超音波モータの駆動回路における一次側の制御回路ではどうにもならない一次側の高周波入力電圧のパルス幅とET積による二次側の電圧変動を解決する。
【解決手段】圧電振動子を励振させる基準周波数の信号を生成する発振回路と、前記基準周波数の信号と検出信号とでパルス幅を変調する駆動信号発生回路と、ドライバ回路と、スイッチング回路と、一次側の制御された入力電圧を電力増幅するリーケージトランスと、を有し、二次側にリーケージインダクタLkと圧電振動子の制動容量Coとで共振回路を構成させ、圧電振動子を励振させる駆動電圧出力回路としたものである。
(もっと読む)
超音波モーターユニット
【課題】超音波モーターを配線基板等に対して固定する際に、圧電素子に電気信号を印加することによる体積変化等を妨げず、且つ小型化及び省スペース化を図ることができる超音波モーターユニットを提供することを目的とする。
【解決手段】被振動子である管状部材と当該管状部材の外周面に当接して配置される複数個の振動子である圧電素子とからなるステーターと、管状部材と螺合結合可能なローターとを備える超音波モーターと、超音波モーターを支持するホルダーとからなる超音波モーターユニットにおいて、ホルダーを構成するホルダー部材は、導電材料からなり、且つバネ性を有してステーターを保持する固定端と超音波モーターを固定すると共に電気信号を入力する接続端とが一体的に形成され、固定端をステーターに備わる圧電素子と直接接続することにより、ホルダー部材を通じて圧電素子に電気信号を伝えることを特徴とする超音波モーターユニットを採用した。
(もっと読む)
電気機械式モーター
電気機械式モーター(10)は、アクチュエーターアセンブリ(12)と、駆動方向(4)に駆動される物体(14)とを有している。アクチュエーターアセンブリ(12)は、アクチュエーター基台(16)と、第一アクチュエーター(20)と第二アクチュエーター(22)とを有している。アクチュエーター(20、22)は、夫々の単一取付部(24、26)によりアクチュエーター基台(16)に、アクチュエーター(20,22)の第一端(25,27)に機械的に取付られている。アクチュエーター(20,22)は、駆動方向(4)と交差するアクチュエーター方向(5)に見て該第一端(25,27)と反対側の第二端(31,33)を成す相互作用部(30,3)を夫々有している。相互作用部(30,32)は、夫々の接触エリヤ(34,35)において、該物体(14)の相互作用面(13)と相互作用するように配置されている。アクチュエーター(20,22)は、夫々への電気信号の反応として夫々の接触エリヤ(34,35)の運動(6,7)を起こさせるようにされたユニモルフ部材(36,38)を有している。それぞれの運動(6,7)は、アクチュエーター方向(5)、駆動方向(4)及び互いに交差している。 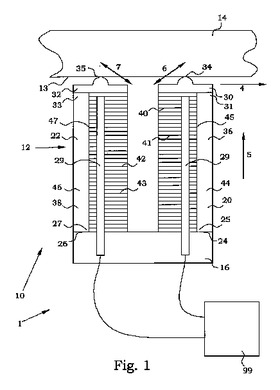 (もっと読む)
(もっと読む)
駆動装置、レンズ鏡筒及びカメラ
【課題】異なる2方向の振動をそれぞれ独立した振動として取り出すことができる駆動装置とそれを用いたレンズ鏡筒を提供する。
【解決手段】第1部分と第2部分(3)とを相対駆動させる駆動装置において、第2部分を駆動させる圧電素子(6)と、圧電素子を介して第2部分を駆動可能に支持するベース部(2)と、圧電素子の駆動電圧が印加される電極部(6a)と、を備え、電極部は、ベース部から露出された露出部(6b)を有することを特徴とする。
(もっと読む)
圧電アクチュエータ、レンズ鏡筒及びカメラ
【課題】駆動力や駆動効率が向上された圧電アクチュエータを提供する。
【解決手段】本発明の圧電アクチュエータは、第1の方向に変位可能な第1圧電素子21、及び第1の方向と交差する第2の方向に変位可能な第2圧電素子22を有し、複数のグループに分けられた複数の圧電部材20と、前記圧電部材20と接触する接触面12Aを有し、前記圧電部材に対して第1の方向に相対移動する相対移動部材12と、複数のグループのうちの1つのグループの圧電部材20Aが接触面に接触している状態のときに、その圧電部材20Aの第1圧電素子を駆動することにより相対移動部材を第1の方向に相対移動させ、圧電部材20Aの第1圧電素子を駆動する際に、他のグループの圧電部材20Bの第2圧電素子を駆動することにより、他のグループの圧電部材を接触面から離間させた状態とする駆動部30と、を備える。
(もっと読む)
圧電アクチュエータ制御装置
【課題】圧電素子から生じる音を低減することができる圧電アクチュエータ制御装置を提供する。
【解決手段】第1の圧電素子としてのバイモルフ型圧電素子110および第2の圧電素子としての積層型圧電素子120を備える圧電アクチュエータ100に制御電流を供給する圧電アクチュエータ制御装置200は以下を備える。複数の通知信号を周期的に順次出力するカウンタ221と、カウンタ221からの通知信号に基づき第2の昇圧回路232で緩やかに増減する第2の電圧V2を形成する第2の昇圧回路232とを備える。そして、この緩やかに増減する第2の電圧V2により増幅されたPWM信号が、積層型圧電素子120に印加される。
(もっと読む)
振動型駆動装置
【課題】移動体の位置を検出できる駆動装置を提供する。
【解決手段】振動型駆動装置1は、軸状の駆動部材7と、駆動部材7を傾斜させることも軸方向に変位させることもできる電気機械変換素子6と、駆動部材7に摺動可能に係合する移動体8と、駆動部材7を軸方向に非対称に往復変位させて移動体8を駆動部材に対して滑り変位させる周期的な摩擦駆動電圧と、駆動部材7を傾斜させる傾斜駆動電圧とを電気機械変換素子に印加可能な駆動回路3と、傾斜駆動電圧が印加されたときの電気機械変換素子6の電圧または電流の立ち上がり波形を検出する波形検出手段27と、電圧または電流の立ち上がり波形に基づいて移動体の位置を推定する位置推定手段4とを有する。
(もっと読む)
41 - 60 / 295
[ Back to top ]