
Fターム[5J062DD04]の内容
Fターム[5J062DD04]に分類される特許
1 - 20 / 37
全地球ナビゲーション衛星システム受信器における帯域スペクトル干渉ビジュアライザ
【課題】全地球ナビゲーション衛星システム受信器における帯域スペクトル干渉ビジュアライザを提供する。
【解決手段】少なくとも1つの割り当てられたGNSS周波数帯内の信号強度データを決定するための装置が提供される。装置は、GNSSアンテナを含む。GNSSアンテナは、割り当てられたGNSS周波数帯内の信号を受信する。装置は、受信回路網をさらに含む。受信回路網は、受信された信号を復調するためのものである。装置は、プロセッサ、およびプロセッサにより実行可能な命令を記憶するためのメモリをさらに含む。命令は、復調された信号に基づいてGNSSに割り当てられた周波数帯内の受信された信号に対する信号強度データを生成するための命令、および復調された信号に基づいて関心のある地点に対する位置を決定するための命令を含む。
(もっと読む)
受信機

【課題】各チャンネルのデータを退避する際に使用するメモリの使用量を削減する。
【解決手段】受信機1は、衛星信号の信号雑音比を取得し、メモリ18へ退避すべき必要ビット数を衛星信号の信号雑音比に基づいて決定する。全てのチャンネルに対して全てのビット数をメモリ18へ退避するのではなく、信号雑音比が所定の条件を満たすチャンネルに対しては一部のビット数を削減して残りのビット数をメモリ18へ退避することで、各チャンネルのデータを退避する際に使用するメモリ18の使用量を削減する。
(もっと読む)
累積誤差を占めるパラメータ推定値のための信頼性指標
【課題】相関分析を用いて、信号から導出されるパラメータ推定値のための信頼性指標を生成する方法を提供する。
【解決手段】非視線信号条件が存在するか、又は存在しそうであるかを示すインジケーションを取得すること、及び/又は複数経路信号条件が存在するか、又は存在しそうであるかを示すインジケーションを取得することによって開始する。これらインジケーションに応じて、パラメータ推定値について信頼性指標を導出する。このパラメータ推定値は信号の到着時間推定値であり、信頼性指標は到着時間推定値の自乗平均平方根誤差である。そしてピークにおける相関関数の強度の測定値に基づいて、非視線信号条件が存在するか、あるいは存在しそうであるかを示すインジケーションを取得する。ピークにおける相関関数の強度測定値は、合計受信出力で除されたチップ毎のエネルギー(EC/I0)であるか、又はピークにおける相関関数のエネルギーである。
(もっと読む)
測位支援装置
【課題】本発明は、衛星航法に基づく測位系において、航行衛星から通知され、その航行衛星に搭載された時計が示す時刻の有効期間を延長する測位支援装置に関し、精度よく安定に航行衛星から正常に受信された衛星時刻の有効期間を大幅に延長することができることを目的とする。
【解決手段】時系列iの順に、航行衛星によって航法データが送信された時刻ti以降における前記航行衛星上の時刻Tiを個別に与え、かつ前記航法データで与えられる予測関数Fpiを蓄積するログ手段と、前記時系列iにおける値が前記時刻Tiの近似値もしくは前記時刻Tiであり、かつ前記時系列iの逆順に先行する所定の数Nの時点において、前記予測関数Fpiに対する偏差が既定の範囲に抑えられ、あるいは最小である予測関数Fpi′で前記予測関数Fpiを補完する補完手段とを備える。
(もっと読む)
測位支援装置
【課題】本発明は、衛星航法に基づく測位系において、航行衛星の位置、速度、加速度の何れかに生じる欠落を補完する測位支援装置に関し、地形や地物の分布に柔軟に適応し、かつ精度よく安定にリアルタイムによる測位を可能とすることを目的とする。
【解決手段】軌道データで時系列tの順に定まる航行衛星の速度Vt を蓄積するログ手段と、前記航行衛星の速度vt0と、前記速度vt0に対する誤差が所定の範囲内にある速度vt1〜vtnとを得る候補取得手段と、前記速度vt0、vt1〜vtnの内、前記時系列tの順に前記航行衛星に作用する外力Ftと前記航行衛星の質量mとの比の前記時系列tの逆順における積分の結果との和の前記ログ手段に先行して蓄積された所定の数Nの速度Vtに対する偏差が規定の範囲内にあり、あるいは最小である特定の速度で前記航行衛星の速度を補完する補完手段とを備える。
(もっと読む)
GNSS受信装置及び測位方法
【課題】マルチパスの影響を低減し、測位精度を向上させること。
【解決手段】GNSS受信装置は、C/Aコードのレプリカ信号を生成し、該C/Aコードのレプリカ信号とGNSS衛星からの測位信号との同期をとることにより、C/Aコードの位相を求める第1の遅延同期ループ回路と、Pコードのレプリカ信号を生成し、該Pコードのレプリカ信号とGNSS衛星からの測位信号との同期をとることにより、Pコードの位相を求める第2の遅延同期ループ回路と、当該GNSS受信装置の移動速度に基づいて、C/Aコードの位相により得られる擬似距離に対する重み付けを設定する重み付け設定部と、該重み付けと、第1の遅延同期ループ回路により求められたC/Aコードの位相と、第2の遅延同期ループ回路により求められたPコードの位相に基づいて、擬似距離を求める擬似距離演算部と、該擬似距離に基づいて、測位を行う測位演算部とを有する。
(もっと読む)
無線測位装置
【課題】第1の発受信手段、第2の発受信手段によって、2次元もしくは3次元の位置を高精度で測位できる装置を安価に実現する。
【解決手段】第2の発受信手段から少なくとも起点信号を含む無線信号を時分割でかつバースト信号として間欠発信し、第1の発受信手段において、前記無線信号を受信して前記起点信号を再生し、再生した起点信号に同期発振手段を同期させて生成した距離測定信号と、別に生成した方向測定信号とを含む無線信号を、複数のアンテナを周期的に切替えながら発信し、前記第2の発受信手段において、前記起点信号を基準とし、前記距離測定信号の位相を測定して第1の発受信手段からの距離を算出し、前記複数のアンテナに対応した方向測定信号の位相差を測定して第1の発受信手段が位置する方向を算出し、算出した距離と方向から自局の3次元の位置を高精度でかつ瞬時に測位する。
(もっと読む)
密接に統合されたNAV−COMの能力で既存のGNSSユーザ装置をアップグレードする実用的な方法
統合されたNav−Comの能力を、任意の全地球航法衛星システム(GNSS)のユーザ機器、例えばGPS受信機に加える方法は、既存のユーザ機器のハードウェアを修正する必要がない。この概念を防衛高度GPS受信機(DAGR)に適用して、低地球軌道(LEO)衛星、例えばイリジウムと、GPS又は他のGNSSシステムとを組み合わせて、位置、航法、及びタイミング(PNT)の、正確さ、完全性、及び利用可能性をかなり改善して、精密に結合された航法と通信のモードを合成することによって、新たな通信の拡張を利用できるようにする。既存のDAGRと差込み式のiGPS拡張モジュールとの間における、時間の同期化の安定性を、要求されるほぼ20psレベルにするために、専用の広帯域の基準信号をiGPSモジュールによって生成して、既存のアンテナポートを介してDAGRに接続して、DAGRのハードウェアの修正を不要にする。 (もっと読む)
電子機器およびその制御方法
【課題】簡単な構成で消費電力を低減でき、正確な時刻を表示することができる電子機器およびその制御方法を提供すること。
【解決手段】電子機器は、第1衛星信号および第2衛星信号を受信するGPS装置10と、制御部20と、週番号特定情報が記憶されるRAM31と、を備える。制御部20は、RAM31に週番号特定情報が記憶されている場合にGPS装置10を第1衛星信号を受信する第1受信モードで制御して時刻情報と第1週番号情報を取得し、RAM31に記憶されている週番号特定情報を用いて第1週番号情報の周期回数を算出した後、現在日時を算出する。また、RAM31に週番号特定情報が記憶されていない場合にGPS装置10を第2衛星信号を受信する第2受信モードで制御して時刻情報と第2週番号情報を取得し、この時刻情報および第2週番号情報に基づいて現在日時を算出する。
(もっと読む)
パラメータ値算出方法、長期予測軌道データの提供方法、情報提供装置及び測位システム
【課題】長期予測エフェメリスを生成するための新たな手法を提案すること。
【解決手段】測位システム1において、サーバシステム3は、衛星軌道の所定の有効期間を区分する予測対象期間の長さを、将来になるほど長くなるように可変に設定する。より具体的には、外部システム2から取得した衛星精密暦に含まれる過去の予測位置に対応するGPS衛星SVの実績位置と、外部システム2から取得した衛星予測暦に含まれる過去の予測位置との差で表される予測誤差が大きいほど、予測対象期間の長さを長く設定する。そして、設定した複数の予測対象期間それぞれについて、衛星予測暦に基づいて、ケプラーの楕円軌道モデルに従ったGPS衛星SVの予測軌道を求め、衛星軌道パラメータの値を算出する。そして、算出した衛星軌道パラメータの値を予測対象期間毎に纏めた長期予測エフェメリスデータを生成して、携帯型電話機4に提供する。
(もっと読む)
GNSS受信装置および測位装置
【課題】BOC信号を用いた場合にコード初期値が取り得るコード位相差値の範囲を広くすることができるGNSS受信装置を実現する。
【解決手段】コード位相差検出部250は、E相関値とL相関値との和からE+L相関値を算出する。コード位相差検出部250は、E+L相関値に定数Kを乗算してP相関値に加算することで相関係数を設定する。コード位相差検出部250は、設定した相関係数を、E相関値とL相関値との差分からなるE−L相関値に乗算することで、ドットプロダクト演算値を算出する。この際、E相関値の元となるEarlyコード信号およびL相関値の元となるLateコード信号を決める位相差τ2、および定数Kは、P相関特性の負値領域をE相関値およびL相関値の正値領域で補正して正値方向へ拡張するような値に設定される。
(もっと読む)
軍用型GPS受信機を用いたナビゲーション・デバイスにおける差分GPS補正の完全性
【課題】差分GPSデータに基づいてナビゲーション解に対する補正値を計算する。
【解決手段】ナビゲーション・システム用のプロセッサ100において、GPS測距システム116が少なくとも3機のGPS衛星からGPS天体暦を受信し、DGPSデータ受信機130が差分GPSデータを受信する。単体又は組み合わせで動作する少なくとも1つのカルマン・フィルタ126は、GPS測距システムから受信したGPS天体暦に基づいて、平均誤差半径を含むナビゲーション解を計算し、差分GPSデータに基づいて補正ナビゲーション解を計算する。モード・ロジック124が、GPS天体暦に基づくナビゲーション解、又は補正されたナビゲーション解のどちらを選択するかを決定する。補正されたナビゲーション解を平均誤差範囲の区域と比較し、その区域内にない場合、補正されたナビゲーション解を選択しないで、補正前のナビゲーション解を選択する。
(もっと読む)
測位方法、プログラム及び測位装置
【課題】方位のばらつきに起因する測位位置の直進性の低下を防止すること。
【解決手段】携帯型電話機1において、第1のKF(カルマンフィルタ)測位処理により求めた携帯型電話機1の移動速度が所定の閾値速度未満であることを検出した場合に、当該検出直前の携帯型電話機1の移動速度を保持する。そして、第1のKF測位処理により求めた携帯型電話機1の位置、移動速度及び方位を観測情報とする第2のKF測位処理を行って測位するが、この際、保持されている方位を観測情報としてKF処理を行う。
(もっと読む)
ハイブリッドSPS軌道データを用いた位置判定のための方法および機器
移動局が、衛星軌道データのハイブリッド合成を用いてその位置(または速度)および時間を判定するための方法およびシステム。一態様では、移動局は、確定点の判定において、ある衛星からの予測軌道データと、別の衛星からのリアルタイム軌道データとを合成する。合成は、同じまたは異なる衛星システム内の衛星に対して行うことができる。移動局は、ある期間におけるある衛星のリアルタイム軌道データ、および別の期間における同じ衛星の予測軌道データを用いることができる。別の態様では、移動局は、リアルタイム軌道データを用いて、予測軌道データ中のクロック・バイアスを補正することができる。クロック・バイアスへの補正は、リアルタイム軌道データを提供する同じ衛星にも、同じまたは別の衛星システム内の異なる衛星にも行うことができる。  (もっと読む)
(もっと読む)
時刻算出装置及び測位装置
【課題】外乱などの影響を受けることなく、ウィークナンバーが対応している期間を過ぎても正確な現在時刻を求めることができるようにする。
【解決手段】ガリレオ衛星からウィークナンバーの値を、GPS衛星のウィークナンバーとガリレオ衛星のウィークナンバーのオフセットとGPS衛星のウィークナンバーとガリレオ衛星のウィークナンバーの取得タイミングの違いを考慮し、GPS衛星のウィークナンバーのとりうる値の最大値で除算し、商と余りを求める(ステップS1)。求めた商の値によりGPS衛星のウィークナンバーの現在の周回数(0回、1回、2回、・・・など)を特定する(ステップ2)。ステップS1で求めた余りの数によりGPS衛星s1のウィークナンバーの新たな起点を特定する(ステップS3)。GPSからの受信信号に含まれている当該週の初めから現在までに何秒経過しているかの情報から現在の年月日時分秒を判断する(ステップ4)。
(もっと読む)
ナビゲーション信号反射器の位置決定を有するユーザ装置ナビゲーション解法
ナビゲーション信号反射器の位置決定を有するユーザ装置ナビゲーション解法の方法およびシステムが記載される。一実施例において、全地球測位システム(GPS)プラットフォームから送られるナビゲーション信号は、直接のナビゲーション信号および反射ナビゲーション信号としてGPSが使用可能な受信器で受取られる。直接のナビゲーション信号は反射ナビゲーション信号から分離することができる。受信器測距測定値は、GPSプラットフォームの直接経路信号を介して受取られる直接のナビゲーション信号から定めることができ、GPSが使用可能な受信器のナビゲーション解法は受信器測距測定値から解くことができる。同様に、反射器測距測定値は、信号反射器から反射信号経路を介して受取られる反射ナビゲーション信号から定めることができ、信号反射器の位置はGPSが使用可能な受信器の反射器測距測定値から解くことができる。  (もっと読む)
(もっと読む)
GNSS受信機及び信号追跡回路及びシステム
高度な追跡エンジン及び探索エンジンを有するGNSSプラットフォームアーキテクチャ。追跡機能及び探索機能は、目標とする機能のために各々が高度に最適化された2つの独立したエンジンに分離される。 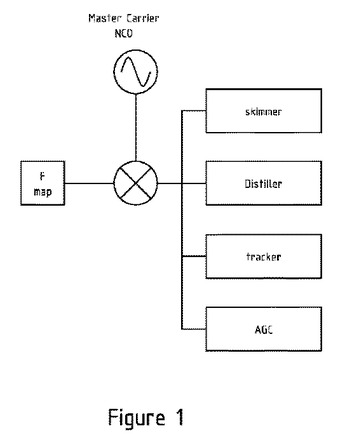 (もっと読む)
(もっと読む)
測位システム
【課題】1つの線形回帰方程式を用いて容易に且つ高精度に電離層遅延を推定演算する。
【解決手段】基地局1は、測位衛星SATからの測位用信号を受信して、キャリア位相積算値およびコード疑似距離を取得する(S1)。基地局1は、航法メッセージを取得、解析して、電離層遅延の推定演算に利用する測位衛星の情報を取得する(S2,S3)。基地局1は、基地局1と測位衛星との距離に関して、過去の推定演算により得られた測位衛星位置の周りでテイラー展開することで線形近似を行う(S4)。基地局1は、測位衛星位置に関する線形近似の結果を行列演算要素とし、電離層遅延を未知数として含み、キャリア位相積算値およびコード疑似距離と基地局位置とから算出される値を観測値として、線形回帰方程式を設定する。基地局1は、この線形回帰方程式にカルマンフィルタ等を適用して、電離層遅延を推定演算する(S5)。
(もっと読む)
時間測定に基づく衛星測位システムのための方法および装置
【課題】GPS信号を検索し、受信器の位置(および正確な時刻)を計算する処理は、時間がかかり、数分を要し、衛星信号がブロックされる多くの状況では、GPS衛星から受信された信号のレベルが低すぎて、誤りなしに衛星データ信号を復調し、読み取ることが不可能である。そのような読み取りが不可能または非実用的である時に時刻の曖昧さを解決するための代替アプローチの提供。
【解決手段】衛星データ・メッセージの少なくとも一部を移動SPS受信器内で受信するステップと、前記衛星データ・メッセージの前記少なくとも一部の第1記録を判定するステップと、前記第1記録が何時前記移動SPS受信器で受信されたかを示す時刻を判定するために前記移動SPS受信器から前記第1記録をリモート基地局に送信するステップとを含み、判定された時刻が前記移動SPS受信器の位置を判定するのに使用される、方法。
(もっと読む)
部分探索搬送波位相整数アンビギュイティ決定
全地球航法衛星システムにおいて整数アンビギュイティ決定を実施する方法を開示する。衛星の特定されたセット内の衛星から受信される信号のうちの少なくとも幾つかの搬送波位相測定に関連付けられるアンビギュイティのセットを特定する(図4Aのブロック420)。整数アンビギュイティを推定し、整数アンビギュイティ値の最良候補セット及び次善候補セットを求める(ブロック430)。整数アンビギュイティ値の最良セットが識別試験を満たさないと判断する(ブロック440)と、最良候補セット及び次善候補セット内の整数アンビギュイティ値が所定の基準を満たさない各アンビギュイティをアンビギュイティのセットから除去し、アンビギュイティの低減されたセットを生成する(図4Bのブロック450)。その後、アンビギュイティの低減されたセット内の整数アンビギュイティを決定し(図4Cのブロック468)、決定された整数アンビギュイティに従って出力を生成する(図4Cのブロック470)。 (もっと読む)
1 - 20 / 37
[ Back to top ]