
Fターム[5J070AC01]の内容
レーダ方式及びその細部 (42,132) | 測定量 (6,664) | 位置 (1,245)
Fターム[5J070AC01]に分類される特許
501 - 520 / 1,245
画像レーダ装置

【課題】目標の相対運動と3次元形状を推定することのできる画像レーダ装置を得る。
【解決手段】目標に対して送信電波を照射するための送信機1及び送受信アンテナ3と、前記送信電波が前記目標で反射された反射電波を受信する、互いに異なる位置に配置された複数の受信用補助アンテナ4,5および受信機6〜8と、前記複数の受信用アンテナおよび受信機で受信された前記受信電波に基づき、前記目標のレーダ動画像を再生するレーダ画像再生部9と、前記レーダ画像再生部で連続的に再生された複数のレーダ動画像を用いて目標の運動及び形状を推定する目標運動・形状推定手段11とを備える。
(もっと読む)
IDタグ群の位置検知装置及びその方法

【課題】
本発明は、エンドデバイスとしてのIDタグ間にける通信が行えないような場合であっても、屋内において、超小型のパウダー状のIDタグの位置を検出することを可能とするものである。
【解決手段】
本発明のIDタグ群の位置検知装置は、複数のIDタグを同時に読み取り可能なIDタグリーダと、前記IDタグリーダによって同時に読み取られた複数のIDタグの位置情報を記憶する記憶部と、前記IDタグリーダにおける異なる読み取り操作によって読み取られた複数回の複数のIDタグの位置情報から、共通するIDタグを検索し、複数のIDタグの位置を推定する推定部と、を有することを特徴とする。
(もっと読む)
位置検知システム及び位置管理サーバ
【課題】サファリパーク内の動物の位置情報を自動車に乗った見学者にリアルタイムに提供する。
【解決手段】位置検知システム1は、携帯端末2、基地局3、管理サーバ4及び携帯電話5を備える。携帯端末2は、サファリパーク内の動物や自動車に着設され、携帯端末2に固有の端末IDを発信する。基地局3は、サファリパーク内の各箇所に設置され、通信可能範囲の携帯端末2から端末IDを受信し、端末ID及び自らの基地局IDを管理サーバ4に送信する。管理サーバ4は、サファリパークの管理事務所に設置され、各基地局3から端末ID及び基地局IDを収集し、サファリパーク内の動物及び自動車の位置を示す地図情報を作成し、外部から閲覧可能とする。携帯電話5は、見学者が動物や自車の位置を確認するためのものであり、管理サーバ4から地図情報を受信、表示し、見学者のアイコン選択を受けて、管理サーバ4から動物の属性データを受信、表示する。
(もっと読む)
誘導放射線療法システム
【課題】体の中の腫瘍のようなターゲットの位置を正確に確認し、追跡するためのシステム及び方法の提供。
【解決手段】ターゲットの中に又は近くに位置決め可能な信号を生じさせる外部例示ビーコンと、そのビーコンを遠隔操作により励磁させて、認識可能な信号を生じさせる外部励磁源と、互いに既知の幾何学的形体で間隔を隔てられた複数のセンサとを有する。コンピュータが、センサーに接続され、ビーコンの測定値を使用して、ターゲット内部のターゲットアイソセンタを識別するように形成される。コンピュータは、ターゲットアイソセンタの位置とマシンアイソセンタの位置とを比較する。コンピュータはまた、放射線治療前及びその間、ターゲットアイソセンタがマシンアイソセンタと一致するように、患者及び患者の支持装置の移動を制御する。
(もっと読む)
重なる送信アンテナ及び受信アンテナを有するレーダシステム
自動車の周辺検出用レーダシステムであって、1つ又は複数の送信アンテナにより送信信号を放射する送信手段、物体において反射される送信信号を1つ又は複数の受信アンテナにより受信する受信手段、及び受信した信号を処理する信号処理手段を有するものにおいて、プレーナ技術で実現されて平らな面に設けられている送信アンテナ及び受信アンテナがあり、これらの送信アンテナ及び受信アンテナがそれぞれ少なくとも近似的に同じ放射特性を持ち、これらの送信アンテナの放射特性がこれらの受信アンテナの放射特性に対して異なっていることができ、これらの送信アンテナ及び受信アンテナの異なる組み合わせから受信信号が取得され、信号処理手段においてこれらの受信信号から、物体のために空間方向Rにおけるその角度位置が評価され、その際個々の物体の受信信号が空間方向Rにおけるこの物体の角度位置に従って互いに異なる位相位置を持っていることが利用され、これらの送信アンテナ及び受信アンテナの少なくとも2つが、空間方向Rに関して一致することなく重なり、この重なりがこれらの送信アンテナ及び受信アンテナの次の配置又は構成の少なくとも1つによって実現される
a)アンテナが空間方向Rに対して直角な空間方向Sに関して互いにずれており、特に水 平な空間方向Rのために送信アンテナが受信アンテナの上に設けられている
b)送信アンテナ及び/又は受信アンテナが空間方向Rに関して斜めの形状を持っているc)アンテナが空間方向Rに関して互いにはまり合っている
d)放射するか又は受信する素子が少なくとも2つの送信アンテナ又は受信アンテナによ り共通に使用される
ことを特徴とする。 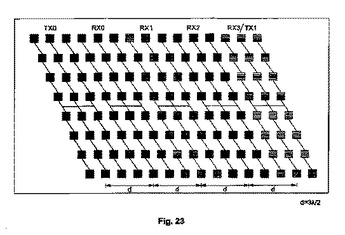 (もっと読む)
(もっと読む)
レーダ装置
【課題】1台のレーダ装置で各種用途に対応することを課題とする。
【解決手段】レーダ装置は、ビームを輻射するアンテナと、アンテナによって輻射されることで入射されたビームの進行方向を屈折して屈折後のビームを出射する誘電体レンズとを備える。誘電体レンズは、アンテナによってビームが輻射される方向にアンテナと所定の距離を挟んで設置される。また、レーダ装置は、アンテナと誘電体レンズとが搭載された車両について、車両の走行に関する情報を収集し、収集した情報に基づいて、アンテナと誘電体レンズとの間の距離を調整する。例えば、車両速度が所定の閾値よりも速い場合には、距離を焦点距離と同一にして、ビーム幅をシャープにする。一方、車両速度が所定の閾値よりも遅い場合には、距離を焦点距離よりも長くして、ビーム幅を広角にする。
(もっと読む)
改善された角度形成を持つレーダシステム
自動車の周辺検出用レーダシステムであって、少なくとも2つの送信アンテナにより送信信号を放射する送信手段、物体において反射される送信信号を1つ又は複数の受信アンテナにより受信する受信手段、及び受信した信号を処理する信号処理手段を有するものにおいて、少なくとも1つの受信アンテナの位相中心が、空間方向Rに関してこの空間方向にずれた2つの送信アンテナの位相中心外になく、アンテナにより受信される信号が、これら2つの送信アンテナに由来する成分に従って分離されることを特徴とする。 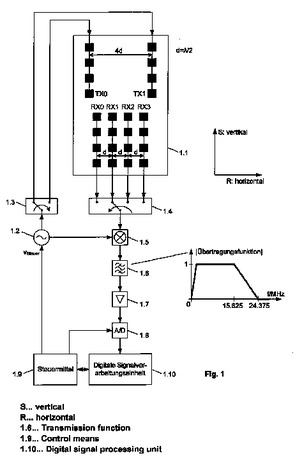 (もっと読む)
(もっと読む)
レーダーに用いることを含む、アンテナ符号化発射・受信方法及び装置
レーダーセルを小さくし、レーダーシステム、特にHFSWRの検知を向上させる。一斉送信システムSEMは、2つずつ直交しており、かつ、各々が時間的にシフトすることで自身に直交する基本信号を一斉送信して、送信放射パターンを形成することができ、各放射パターンは、二次ローブと交互となるメイン放射ローブLP1、LPNを含み、基本信号と関連するメインローブは、空間において実質的に並置されている。受信システムSREは、受信区域に含まれるセルCESn,mと同数の受信パターンを監視受信区域に形成することができ、前記セルは、送信放射チャートの1つのメイン放射ローブによりカバーされており、かつ、一斉送信システム及び受信システムから所定のバイスタティック距離に位置している。 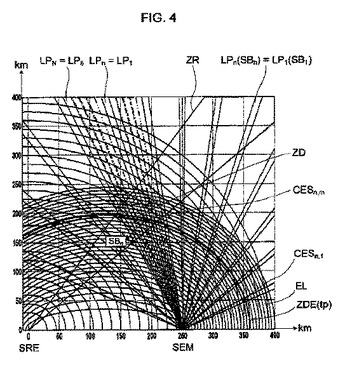 (もっと読む)
(もっと読む)
測位方法、プログラム及び測位装置
【課題】方位のばらつきに起因する測位位置の直進性の低下を防止すること。
【解決手段】携帯型電話機1において、第1のKF(カルマンフィルタ)測位処理により求めた携帯型電話機1の移動速度が所定の閾値速度未満であることを検出した場合に、当該検出直前の携帯型電話機1の移動速度を保持する。そして、第1のKF測位処理により求めた携帯型電話機1の位置、移動速度及び方位を観測情報とする第2のKF測位処理を行って測位するが、この際、保持されている方位を観測情報としてKF処理を行う。
(もっと読む)
飛行体捕捉システムおよび飛行体捕捉方法
【課題】 従来よりも容易・迅速にステルス化された目標を捕捉し得る飛行体捕捉システムを提供することを目的とする
【解決手段】 本発明に係る飛行体捕捉システムは、飛行体が飛行することにより発生する飛行機雲を捕捉する飛行機雲レーダ装置と、飛行する飛行体を捕捉する捜索レーダ装置と、前記飛行機雲レーダ装置により飛行機雲が捕捉され、かつ前記捜索レーダ装置により飛行体が捕捉されない場合に前記飛行機雲を発生する飛行体がステルス飛行体であると判断するステルス飛行体判断装置とを具備することを特徴とする。
(もっと読む)
ミリ波レーダ装置用防水構造
【課題】降雨時など車両が濡れる状況において、その車両に搭載されるミリ波レーダ装置の性能が低下してしまう、ということをより確実に防止し得るミリ波レーダ装置用防水構造(水滴防止用カバー)を提供する。
【解決手段】水滴防止用カバー1は、カバー1a〜1dからなると共に筒状に構成され、ミリ波レーダ装置10におけるミリ波電波の透過面(レドーム3)に対し、ミリ波電波の照射方向を除いた四方領域をそのカバー1a〜1dにより覆うものである。これによれば、カバー1a〜1dにより周囲からの水滴が遮られ、レドーム3に水滴が付着してしまうことを防止することができる。このため、ミリ波電波の減衰が生じることを防止でき、ひいてはミリ波レーダ装置10の性能が低下してしまうことを防止することができる。
(もっと読む)
航空機位置測定システム、信号種類判定方法およびセンタ局ならびにプログラム
【課題】航空機位置測定システムにおいて航空機が送信する信号の種類を自律的に判定する。
【解決手段】信号の送信パターンの情報を記憶する送信パターン記憶部7と、信号を全て同種類の信号とみなして受信した後、送信パターン記憶部7に記憶されている送信パターンの情報に基づき、信号の種類を判定する信号種類判定部6とを備える。
(もっと読む)
無線識別システム及びプロトコル
【課題】
対象物の検出、識別、制御及び/又は位置特定を行う。
【解決手段】
用いられる環境に依存して動作モード及びフォーマットにおいて柔軟であるモニタリング・システム及びプロトコルが開示されている。そのようなモニタリング・システム及びプロトコルは、それらの利用を自動的に又はそうするための受信された命令により変えることができる。位置検出システムは、1つ又はそれより多い低周波数送信器、1つ又はそれより無線周波数モニタリング・タグ、及び1つ又はそれより多い受信デバイスを含む。低周波数送信器は、送信器IDのような位置識別情報を送信の近傍のタグに送る。タグは、当該タグから受信器へ送られるより高い周波数送信を用いて送信器IDを中継する。同時に開始する複数のタグのタグ送信を解読するのを可能にする通信プロトコルが開示されている。
(もっと読む)
無線自動識別タグの位置を推定及び追跡するシステム並びに方法
1又は複数の無線自動識別(RFID)タグの位置を特定するシステム及び方法が提供される。照射されたRFIDタグの受信情報信号の位相差は、RFIDタグの位置を特定するために使用される。1又は複数のエキサイタは、RFIDタグを照射するように呼出信号を送信し、このエキサイタは、複数のアンテナを有し、2又は複数のアンテナを介して選択的に送信するように構成され、かつ1つのアンテナで受信するように構成される。同一RFIDタグの複数読み取りはまた、RFIDタグの位置の確率モデルを作成するように行われてもよい。拡張粒子フィルタは、正確なRFIDタグの位置を求めるために確率モデルに適用される。 (もっと読む)
物体検知装置、物体検知システム及び物体検知方法
【課題】位置情報を保有することのない簡単な構成によって、物体の位置、状態等の検知情報を得ることができる物体検知システムを提供する。
【解決手段】 パッシブICタグ12を貼付した一つまたは複数の被検知物体10と、前記タグ12からの電波を受信して前記被検知物体10の被検知情報を検知する一つまたは複数の探索装置20と、前記探索装置20とネットワーク40を介して接続され、前記複数の探索装置20を制御するとともに前記探索装置20が取得した前記被検知情報を得て管理する管理サーバ30と、前記管理サーバ30が取得した情報を格納するデータベース34とで構成され、前記探索装置20は、指向性アンテナ21と、指向性を変更するアクチュエータ22と、方位センサ23、傾斜センサ24と、コントローラ25と、前記指向性アンテナ21の発信電波強度および受信電波強度を制御する電波強度制御部26とを備える。
(もっと読む)
目標追尾装置、目標追尾方法、及び、プログラム
【課題】誤相関を低減することにより、目標を追尾するのに好適な目標追尾装置、目標追尾方法、及び、プログラムを提供する。
【解決手段】電波を発生する電波発生部と、前記電波を放射し、目標から前記電波の反射波を受信する電波送受信部と、前記反射波を画像信号に変換する信号処理部と、前記画像信号から前記目標を検出する目標検出部と、前記画像信号に基づき、前記目標を表示する表示部と、前記目標検出部が検出した検出結果に基づいて、前記目標を追尾するゲートを発生するゲート発生部と、前記ゲート内に前記目標が存在する場合、前記ゲート外の前記画像信号を分離する信号分離部と、を備え、前記目標検出部は、前記信号分離部が分離した信号に基づき、前記目標を検出する。
(もっと読む)
レーダ装置
【課題】複雑な処理をせずとも、互いに略等しい相対距離に存在する対象物の数を検出することのできるレーダ装置を提供する。
【解決手段】画像処理部10は、放射された電磁波が、カメラ101によって撮像された画像に撮像されている他車両で反射した反射波を受信するまでの受信時間を算出する。さらに、画像処理部10は他車両との相対距離を算出し、算出した相対距離と略同じ相対距離に存在する他車両の数を計数し、計数した数と算出した受信時間とを対応づける。レーダ処理部11は、放射された電磁波と反射波との相関を演算しながら、相関がピーク値を生じたときの反射波の受信時間と画像処理部10によって算出された受信時間とを比較して、略等しい受信時間に対応づけられた他車両の数を特定する。レーダ処理部11は、ピーク値を生じた相関の受信時間に基づき相対距離を算出し、特定した他車両の数を対応づける。
(もっと読む)
推定装置
【課題】前方車両の形状及び運動状態を正確に推定する。
【解決手段】推定装置は、レーダ波によって、前方車両表面の複数地点の位置座標を計測し(S110)、この複数地点を単一線分及び二線分で近似する(S120,S1300)。そして、各線分毎に、求めた線分長さ及び近似誤差に基づき、線分が車両前後面、側面を近似した線分である事前確率を算出する(S1400)。一方、過去において推定された前方車両の位置、向き、速さ、進行方向及び角速度の情報を基に、尤度を算出する(S1500)。そしてベイズ推定により、既に求めた事前確率と尤度とから、各線分毎に、線分が車両前後面、側面を近似した線分である事後確率を算出し(S1600)、前方車両のサイズ、位置及び向きを推定する(S1700)。また、これらの情報を基に、アンセンテッドカルマンフィルタにより、車両の速さ、進行方向及び角速度も合わせて推定する(S1800)。
(もっと読む)
対象物検出装置
【課題】反射強度のピークが3つ以上存在する場合において、物体が車両であるか否かを精度良く判定することができる対象物検出装置を提供する。
【解決手段】制御回路11は、反射強度のピークが3つ以上存在する場合、反射強度の高い順に、上位3つのピークを抽出する。これら3つのピークのうち、両端の2つのピークと、これら2つのピーク間の窪みのうち、最低強度に基づいて、前記対象物が車両であるか否かを判定する。また、ピークの強度に対して窪みの強度がある程度落ち込んでいる場合に停止車両であると判定する。
(もっと読む)
対象物検出装置
【課題】反射強度のピークが3つ以上存在する場合において、対象物が車両であるか否かを精度良く判定することができる対象物検出装置を提供する。
【解決手段】制御回路11は、窪みの強度の所定倍(例えば0.5倍)となる基準強度を算出し、左右端ピークから物体端部(左右端ピークの左脇および右脇)に向かって、この基準強度に相当する走査方向(左側基準方向および右側基準方向)を求め、これらの基準方向間の幅(広がり幅Ws)が車両と判定できる所定幅(例えばWs_max=5.0[m])に収まっている場合、車両らしいとして判定する。
(もっと読む)
501 - 520 / 1,245
[ Back to top ]