
Fターム[5J070AC06]の内容
レーダ方式及びその細部 (42,132) | 測定量 (6,664) | 速度 (1,297)
Fターム[5J070AC06]の下位に属するFターム
Fターム[5J070AC06]に分類される特許
1,081 - 1,100 / 1,238
レーダ装置
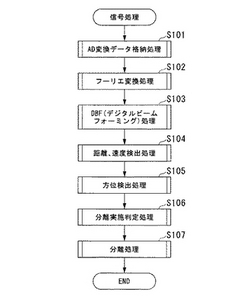
方向の観測値の信頼性が低下しやすい、互いに近接する複数の外部目標の位置と速度とを精度よく追尾する。アンテナからの受信信号を信号処理して複数の外部目標の相対距離と相対速度とを算出するとともに、前記アンテナが放射するビームパターンのうち、一部が重なり合う隣接するビームパターンを組み合わせることで前記複数の外部目標の方向を算出し、この方向と前記相対距離と相対速度から前記複数の外部目標の位置観測値と速度観測値とを取得して、これら位置観測値と速度観測値から個別の外部目標毎の位置と速度の平滑値を算出する目標追尾フィルタと、互いに近接する前記複数の外部目標からクラスタを形成し、クラスタ内の外部目標に対して、前記目標追尾フィルタとは異なるゲートを設定し、このゲートによって前記外部目標の観測値との相関処理を行う追尾処理クラスタ内目標追尾フィルタと、を備えた。 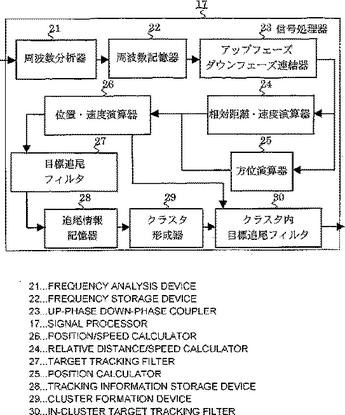 (もっと読む)
(もっと読む)
電子走査型ミリ波レーダ装置およびコンピュータプログラム
【課題】 対象物に対する横方向の分離性能を向上させる電子走査型ミリ波レーダ装置を提供する。
【解決手段】 デジタル化されたビート信号をフーリエ変換し、これに基づいて所定のピッチ角度でビーム信号を生成する。次に、生成されたビーム信号から対象物の方位、距離を検出する。そして、検出された対象物の方位および距離に基づいて、フーリエ変換された各受信アンテナに対応するビート信号において略同じ距離に複数の対象物があるか否かを検出し、ビート信号に対し分離処理を行う。
(もっと読む)
物体検知装置

【課題】 複数の物体を同時に検知したために上昇側および下降側のピーク周波数が複数ずつ得られた場合に、上昇側および下降側のピーク周波数をより精度良く組み合わせる。【解決手段】 FM−CW波による複数の物体についての上昇側および下降側のピーク周波数の全ての組み合わせについて演算相対速度を演算するとともに、上昇側および下降側のピーク周波数の最も確からしい組み合わせを物体に個別に対応した組み合わせとして確定する際に、前記演算相対速度をCW波のピーク周波数により求めたCW相対速度との差を算出し、その差が最も小さいピーク周波数の組み合わせを物体に対応するピーク周波数の組み合わせとして確定するので、上昇側および下降側のピーク周波数の組み合わせの精度を更に高めて物体との距離および相対速度をより正確に演算することができる。 (もっと読む)
レーダ装置
【課題】 FMCWレーダ装置において、干渉による影響を抑制し、安定的に、距離を求められるようにする。
【解決手段】 レーダ装置は、上り及び下り変調時の各ビート信号Xnに、干渉波成分を減衰可能な窓関数を作用させる。また、作用後の上り変調時のビート信号Xnから、相関行列Ruを算出すると共に(S310)、行列Ruと、前回算出の相関行列Ru1と、前々回算出の相関行列Ru2とを積算して行列Raを求める。これより、複数サイクル分のビート信号Xnを積算する(S320)。その後、行列RaをDFT処理し(S330)、複数サイクル分の上り変調時のビート信号の積算信号に対応するスペクトルY1を求める。また、下り変調時のビート信号にも、同様の処理を施し、複数サイクル分の下り変調時のビート信号の積算信号に対応するスペクトルY2を求める。そして、スペクトルY1,Y2からビート周波数を特定し、距離を求める。
(もっと読む)
物体検出装置
【課題】 2つの検出手段のうちの一方の検出手段で物体を検出できない場合でも検出対象の物体を設定することができる物体検出装置を提供することを課題とする。
【解決手段】 レーダによる情報と画像による情報に基づいて物体を検出する物体検出装置1であって、レーダによって物体を検出するレーダ検出手段2と、画像によって物体を検出する画像検出手段3と、レーダ検出手段2によって検出した物体の位置情報と画像検出手段3によって検出した物体の位置情報に基づいてレーダ検出手段2によって検出した物体と画像検出手段3によって検出した物体とが同一物体か否かを判断する判断手段8とを備え、2つの検出手段2,3の一方の検出手段で過去に同一物体と判断した物体を検出できない場合、当該過去に同一物体と判断した物体に設定された情報から求めた予測移動軌跡と他方の検出手段で検出した物体の位置情報とに基づいて同一物体か否かを判断することを特徴とする。
(もっと読む)
車両用物体検出装置
【課題】 アレーアンテナを用いて高精度に物体を検出できる領域が拡張された車両用物体検出装置を提供すること。
【解決手段】 車両に搭載され、自車両周辺の物体(移動体又は停止物)を検出する車両用物体検出装置に、第一の領域においては第一の精度で物体を検出し、第一の領域とは異なる第二の領域においては第一の精度よりも低い第二の精度で物体を検出する1以上の検出器から成る物体検出手段と、物体検出手段により第一の領域内の複数の場所でそれぞれ検出された複数の物体相対位置に基づいて物体のその後の相対移動軌跡を推定する軌跡推定手段と、物体検出手段により第二の領域内で検出された物体相対位置と軌跡推定手段により推定された物体の推定相対移動軌跡とが重なったとき、第二の領域内で検出された物体相対位置を第二の精度より高い第三の精度で検出されたものとみなす精度補正手段とを備える。第三の精度は、例えば、第一の精度と等しい。
(もっと読む)
物体検出装置
【課題】 物体を高精度に検出する物体検出装置を提供することを課題とする。
【解決手段】 レーダによる情報と画像による情報に基づいて物体を検出する物体検出装置1であって、レーダによって物体を検出するレーダ検出手段2と、画像によって物体を検出する画像検出手段3と、レーダ検出手段2によって検出した物体の位置情報と画像検出手段3によって検出した物体の位置情報との関係が判断基準を満たしている場合にレーダ検出手段2によって検出した物体と画像検出手段3によって検出した物体とが同一物体と判断する判断手段8とを備え、物体までの距離が長い場合には判断基準を同一物体と判断し易くなるように変更することを特徴とする。
(もっと読む)
物体検出装置
【課題】 物体を高精度に検出する物体検出装置を提供することを課題とする。
【解決手段】 レーダによる情報と画像による情報に基づいて物体を検出する物体検出装置1であって、レーダによって物体を検出するレーダ検出手段2と、画像によって物体を検出する画像検出手段3と、レーダ検出手段2によって検出した物体の位置情報と画像検出手段3によって検出した物体の位置情報に基づいて、レーダ検出手段2によって検出した物体と画像検出手段3によって検出した物体が同一物体か否かを判断する判断手段10とを備え、判断手段10は、画像検出手段3によって検出した物体に対してレーダ検出手段2によって検出した物体が複数個対応している場合、当該複数個の物体のうち車両中心の推測走行軌跡に近い物体を同一物体と判断することを特徴とする。
(もっと読む)
目標検出装置
【課題】 船舶などの目標が生み出す引き波の影響を排除して真の目標を正確に検出し、真の目標がカメラの撮影範囲から逸脱しないようにカメラを制御することができる目標検出装置を得ることを目的とする。
【解決手段】 クラスタリング処理部6により検出された目標のビデオ領域における進行方向の広がり部分を検出し、その目標のビデオ領域から進行方向の広がり部分を除去する広がり除去部10を設け、その広がり除去部10により広がり部分が除去された目標のビデオ領域の重心位置を計算し、その重心位置に応じてカメラ16を制御する。
(もっと読む)
変調信号発生回路、送受信モジュール、およびレーダ装置
【課題】 VCOの出力周波数の温度ドリフトが大きく、法定周波数範囲内で所定のFM変調波を得るためには、変調直線性を得るための変調補正電圧を温度毎に設定する必要があり、膨大な補正電圧データと試験、調整時間を要していた。
【解決手段】 周波数補償電圧によりVCOの周波数温度ドリフトを補償し、温度に依存しない一定のDC成分を持つ変調電圧によりFM動作させることにより、温度による変調感度の変動を低減し、出力信号の変調直線性を得るための変調補正電圧の温度データを大幅に簡素化し、試験、調整時間を大幅に削減することができる。
(もっと読む)
物体検知装置
【課題】 FM−CWモードで物体を検知する物体検知装置の異常を精度良く判定する。【解決手段】 送受信アンテナ6から送信する電磁波の周波数を連続的に変調する物体検知用のFM−CWモードと、送受信アンテナ6から送信する電磁波の周波数を変調しない異常判定用のCWモードとを切り換え、FM−CWモードの受信信号の信号レベルが第1判定閾値以下であり、かつCWモードの受信信号の信号レベルが前記第1判定閾値よりも高い第2判定閾値以下であるときに異常を判定するので、FM−CWモードの受信信号の信号レベルだけ、あるいはCWモードの受信信号の信号レベルだけから異常を判定する場合に比べて判定精度を高めることができ、しかも物体検知用のFM−CWモードの機能が健在なのに、異常判定用のCWモードの機能が失われたことで異常と判定されてしまう不具合を回避することができる。 (もっと読む)
レーダ信号処理装置及びドップラ気象レーダ
【課題】 降水エコーのドップラ速度が0m/s付近に集中している場合でも、降水エコーの減衰を招くことなく、地形エコーを除去することができるようにする。
【解決手段】 地形エコーの除去比SCR/速度幅W/速度Vと地形エコー有無判定用のスレッショルドを比較し、それらの比較結果から地形エコーが含まれているか否かを判定する地形エコー有無判定部15を設け、その判定結果が地形エコーが含まれている旨を示す場合、CMTI処理部16により地形エコーが除去されたIQデータを選択し、その判定結果が地形エコーが含まれていない旨を示す場合、地形エコーが除去される前のIQデータを選択する。
(もっと読む)
物体検出装置
【課題】 検出した物体に高精度な情報を設定できる物体検出装置を提供することを課題とする。
【解決手段】 レーダによる情報と画像による情報に基づいて物体を検出する物体検出装置1であって、レーダによって物体を検出するレーダ検出手段2と、画像によって物体を検出する画像検出手段3と、レーダ検出手段2によって検出した物体の位置情報と画像検出手段3によって検出した物体の位置情報に基づいて、レーダ検出手段2によって検出した物体と画像検出手段3によって検出した物体とが同一物体か否かを判断する判断手段8とを備え、判断手段8で同一物体と判断した物体については、レーダ検出手段2によって検出した当該物体の横方向のデータと画像検出手段3によって検出した当該物体の横方向のデータとの位置関係に基づいて横幅及び/又は横位置の設定方法を変更することを特徴とする。
(もっと読む)
ドップラ効果を用いた速度計測方法及びドップラ速度計
【課題】ドップラ速度計で、被計測物体へ向けて送信する出力波の周波数が低い場合であってもドップラ周波数を増大させることができ、高分解能で速度を検出可能とする。
【解決手段】被計測物体Wに向かって送信波を送信すると共に、該送信波を周波数逓倍したものを基準波としておき、前記送信波が被計測物体で反射されたものを受信波として受信した上で基準波と同一逓倍率nで周波数逓倍して、基準波と周波数逓倍された受信波との周波数差から求められるドップラ周波数nfdから被計測物体の速度vを算出する。
(もっと読む)
車両用レーダ装置
【課題】 レドーム又はレーダカバーへの汚れの付着を適切に判定する機能を備えた車両用レーダ装置を提供すること。
【解決手段】 車両に搭載される車両用レーダ装置が、所定の角度範囲を電子的又は機械的に走査し、受信レベルの走査角度プロファイル(走査角度変化に対する受信レベル変化)を作成するプロファイル作成手段と、プロファイル作成手段により作成された受信レベルの走査角度プロファイルのピークの鋭さに基づいて(レドームやレーダカバーへの)汚れ付着の有無を判定する汚れ判定手段とを備える。汚れ判定手段は、走査角度プロファイルのピークの鋭さが所定の閾値を下回ったときに汚れが付着していると判定する。汚れ判定手段は、例えば、走査角度プロファイルのピークから所定量低い受信レベルが検出された2つの走査角度間の角度幅が所定の角度幅より広いときに、走査角度プロファイルのピークが上記所定の閾値を下回ったと判定する。
(もっと読む)
パルスレーダー装置
【課題】
本願発明は、スイッチングパルスによるノイズに起因した誤動作を防止することができるパルスレーダー装置を提供することを目的とする。
【解決手段】
上記目的を達成するために、本発明は、送信パルスを変調した送信パルス波を送信する送信部及び測定対象物で反射した前記送信パルス波の反射波を受信して復調した受信パルスを生成する受信部を含むレーダーモジュールと、直流電力をスイッチングパルスのオン・オフによりスイッチングして前記レーダーモジュールへの駆動電力を生成するスイッチング電源と、前記スイッチングパルスの立ち上がり時からの所定期間を除く前記スイッチングパルスのオン時又は前記スイッチングパルスの立ち下がり時からの所定期間を除く前記スイッチングパルスのオフ時に前記送信パルス波の送信から前記受信パルスの生成までが完了するように、前記送信部の動作を制御する制御部と、を備えるパルスレーダー装置である。
(もっと読む)
飛しょう体誘導装置
【課題】 旋回、ジンギング、ダイブなど高機動運動目標を誘導する場合、又は目標のベクトルから直線外挿により会合点を算出する場合、会合点が大きく振れ、飛しょう体速度を低下させ命中精度が悪化していた。また飛しょう体速度低下を防止するため、高機動運動目標に会合点が振れない様な追尾フィルタを用いた場合、飛しょう体が目標に対して終末誘導をする際のイニシャルヘディングエラーが大きくなり命中精度を悪化させていた。
【解決手段】 イニシャルヘディングエラー等の推定値に基づき、2種類の追尾フィルタを使い分けることにより、会合直前の高機動運動目標に対しては高感度の追尾フィルタを用い、イニシャルヘディングエラーの少ない誘導を行い、低機動運動の目標、または会合まで時間が掛かる目標に対しては低感度の追尾フィルタによる飛しょう体速度低下の少ない誘導を行う様にした。
(もっと読む)
アクティブターゲット検出システムおよび方法
【課題】レーダ波を送信して目標物からの折り返し信号を受信し、各目標物との詳細な距離/速度を検出するとともに、目標物における無駄な電力消費を削減する。
【解決手段】制御部101は、無線通信機能の動作時に、目標物のアクティブターゲット装置を指定する局ID情報を含むパケットデータPDを出力し、変調回路105は、そのデータを発振器104からのレーダ波に乗せて送信する。アクティブターゲット装置は、自局の局ID情報を受信した場合に折り返し送信を起動し、ミキサ108は、レーダ機能の動作時に、送信レーダ波の一部と折り返し送信されたレーダ波を混合することにより、ビート信号を検出する。
(もっと読む)
障害物検知センサ
【課題】本発明は、状況に応じて、適切に感度を調節することが可能な障害物センサを提供することを目的とする。
【解決手段】 所定の周波数の電磁波を送出し、障害物により反射された前記電磁波の反射波を検出して、前記障害物の速度に応じた周波数の信号を出力するドップラーセンサ2と、前記ドップラーセンサ2の出力信号を受け取り、当該出力信号を周波数帯域毎に異なる増幅率で伝達する信号処理部(3乃至5)と、前記信号処理部(3乃至5)の出力信号を受け取り、当該出力信号の信号強度に基づいて前記障害物の有無を検知する検知部(6、7)と、から構成される。
(もっと読む)
レーダの軸ずれ量決定装置
【課題】 静止物標の分布に基づくレーダの水平方向軸ずれ量決定において、直線走行からカーブ走行に移行する際にも正確に軸ずれ量を決定する。
【解決手段】 検出された静止物標の2次元的な分布のデータおよび直線走行かカーブ走行かを示すフラグを現在から所定時間前まで時系列的に保持することによって(ステップ1002〜1018)、所定時間前の分布データおよびフラグをそれぞれT_Map(4)およびT_Flag(4)として保持する。現在および所定時間前のいずれにおいても直線走行していたと判定されるときのみ(ステップ1020)所定時間前の分布データT_Map(4)をA_Mapに積算し(ステップ1022)、積算値A_Mapに基いて軸ずれ量を演算する(ステップ1026)。
(もっと読む)
1,081 - 1,100 / 1,238
[ Back to top ]