
Fターム[5J070AC06]の内容
レーダ方式及びその細部 (42,132) | 測定量 (6,664) | 速度 (1,297)
Fターム[5J070AC06]の下位に属するFターム
Fターム[5J070AC06]に分類される特許
1,101 - 1,120 / 1,238
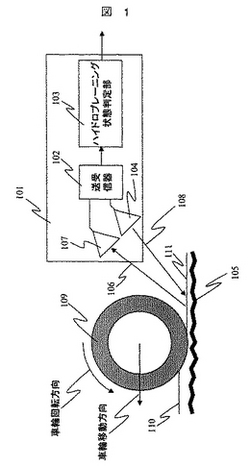
ハイドロプレーニング状態判定装置
【課題】
湿潤路を走行中に車輪と路面との接触が断たれ、ハイドロプレーニングが発生したことを正確に判定する。
【解決手段】
送信波を送信する送信機能と、前記送信機能で送信した送信波の反射波を受信する受信機能と、前記送信機能から送信する送信波を車輪の後ろの路面に送信し、送信波の路面からの反射波を前記受信機能で受信して、ハイドロプレーニングの発生状態を判定するハイドロプレーニング状態判定機能とを備えたことを特徴とするハイドロプレーニング状態判定装置。
(もっと読む)
レーダ装置

【課題】 本発明は、装置自体の異常を精度良く判定できるレーダ装置を提供する。
【解決手段】 送信されたビームが物標から反射された反射波を受信した反射波信号に基づいて該物標を検出するレーダ信号処理部を備え、該レーダ信号処理部は、静止した物標に係る反射波信号のレベルと基準値との差分値を所定時間積算して求めた積算値と、予め設定された閾値とを比較し、該積算値が該閾値以下であるときに、レーダ装置に異常があると判定する。所定の角度で順次ビームをスキャンして送信するレーダアンテナを有する場合には、レーダ装置自体の異常、例えば、雪や泥の付着などによるレーダアンテナの感度低下を判定でき、誤判定を防止できる。
(もっと読む)
電子走査型ミリ波レーダ装置およびコンピュータプログラム
【課題】 到来波に不要な成分を含む場合においても、この不要成分を効果的に除去する電子走査型ミリ波レーダ装置を提供する。
【解決手段】 デジタル化されたビート信号をフーリエ変換し、これに基づいて所定のピッチ角度でビーム信号を生成する。次に、生成されたビーム信号から対象物の方位、距離を検出する。一方、フーリエ変換された各ビート信号から不要な信号成分を除去し、この信号を逆フーリエ変換する。そして、逆フーリエ変換された各ビート信号から対象物の方位および距離に基づいて、ビート信号に対し分離処理を行う。
(もっと読む)
高周波回路およびマイクロ波あるいはミリ波ドップラーセンサ
【課題】 従来の高周波回路は発振器とミキサの間に分配器・結合器があり、送信手段・受信手段からの送信波・受信波を分配・結合しているため、分配器・結合器の伝送線路による損失が発生し、高周波回路が大型、高価格になる問題があった。
【解決手段】 発振器とミキサを直結し、送信波は発振器で生成されミキサを通過したマイクロ波やミリ波の透過電力を利用することにより、分配器・結合器をなくし分配器・結合器の伝送線路による損失を低減し、小型化、低価格の高周波回路を提供する。
(もっと読む)
物体検出装置
【課題】 物体を高精度に検出する物体検出装置を提供することを課題とする。
【解決手段】 レーダによる情報と画像による情報に基づいて物体を検出する物体検出装置1であって、レーダによって物体を検出するレーダ検出手段2と、画像によって物体を検出する画像検出手段3と、レーダ検出手段2によって検出した物体の位置情報と画像検出手段3によって検出した物体の位置情報、横幅情報及び画像検出手段3から遠ざかる方向の長さ情報とに基づいて、レーダ検出手段2によって検出した物体と画像検出手段3によって検出した物体が同一物体か否かを判断する判断手段8とを備えることを特徴とする。
(もっと読む)
レーダー装置
【課題】 受信系の構成を複雑化することなく、移動目標に対する測角精度を向上させたレーダー装置を提供する。
【解決手段】 移動体に搭載され、レーダー波を送信するとともに、指向性を有する空中線4を介して移動目標による反射波を受信し、受信信号に基づいて空中線4の指向方向を制御するレーダー装置1であって、受信信号を復調し、ビデオ信号を生成する受信機5と、移動体の移動速度に基づいて、移動体の移動によるビデオ信号の位相変動を補償する自機運動補償回路6と、受信信号に基づいて移動目標のレンジ方向に関する速度成分を求め、移動目標の移動によるビデオ信号の位相変動を補償する目標運動補償回路8と、各運動補償回路による位相変動補償後のビデオ信号に基づいて、ドップラー周波数を推定するドップラー周波数推定回路9と、ドップラー周波数に基づいて、移動目標の方位を判定する測角回路10により構成される。
(もっと読む)
レーダ装置
【課題】 より安価な装置コストで実現でき、時間的誤差を低減して正確なデジタルビームフォーミング処理を行い得るレーダ装置を提供する。
【解決手段】 送信波を送信する送信系Txと、送信波の反射波を受信する5個の受信系Rx1〜Rx5と、送信波の送信信号と受信波の受信信号とを混合処理した信号について、所定タイミングでサンプリングして所定期間そのサンプリングしたレベルに固定するサンプルホールド回路109−1〜109−5と、該サンプルホールド回路109−1〜109−5の出力を順次デジタル信号に変換する切り替え器110およびA/D変換器111と、サンプリングタイミングを決定し、A/D変換器111の出力に基づきデジタルビームフォーミング処理を行う信号処理装置112と、を備えて構成する。
(もっと読む)
レーダ装置およびそのレーダ信号処理方法
【課題】距離と相対距離の大小関係に係わらず、距離と相対速度とを取り違えることのないレーダ装置を得る。
【解決手段】複数の算出式によりターゲットの距離Rまたは相対速度Vを算出する距離・速度算出手段303と、算出された距離または相対速度から次回観測時点における予測距離算出式を求める予測手段304と、現観測時点の距離算出式が予測距離算出式と等しいか否かを判定する相関判定手段305と、予測距離算出式と等しい場合のみに算出結果を出力するターゲット選択手段306とを備えている。予測手段304が次回観測時点における距離および相対速度と距離算出式を予測して、相関判定手段305が現観測時点の結果と予測手段304の結果について相関を判定し、ターゲット選択手段306が相関判定手段305の判定結果を受けて相関がある現時点の算出結果のみを出力する。
(もっと読む)
レーダ装置および送受信回路
【課題】過大入力に起因する受信系高周波増幅器の寿命劣化や破損を防止することができる送受信回路を得る。
【解決手段】送信信号を生成出力する送信部20と、送信信号を電波として空間に放射する送信アンテナ11と電波が目標物に到達して目標物から反射された電波を受信する受信アンテナ12とを具備するアンテナ部10と、受信アンテナから出力された受信信号が所定の周波数帯にダウンコンバートされたアナログ信号をディジタル信号に変換して出力する受信部30と、受信部30に入力される入力信号の入力レベルを監視する入力信号監視部40と、入力信号監視部40の出力信号に基づいて受信部30への入力信号を遮断または減衰させるための信号処理部(制御手段)50とを備える。
(もっと読む)
撮影制御装置、撮影制御方法および撮影制御プログラム
【課題】 高速で移動する移動体(航空機)を自動で追尾撮影することを目的とする。
【解決手段】 管制装置30においてレーダーデータ処理装置32は、レーダー装置20が取得した航空機のレーダーデータを入力し、航空機の位置(緯度、経度、高度)や航空機の移動状態(方位、速度、加速度)を示すデータを取得する。カメラ制御装置35は、撮影装置10が実際に航空機を撮影する時刻とその時刻における航空機の位置とを入力データに基づいて特定する。このとき、カメラ制御装置35はカメラ制御装置35の処理時間、撮影装置10を制御するデータの伝送時間、撮影装置10の駆動時間、遮蔽物の存在、カメラ11の駆動範囲等に基づき撮影装置10が実際に航空機を撮影する時刻を特定する。また、航空機の移動状態に基づいてその時刻における航空機の位置を特定する。そして、特定した時刻において特定した位置を撮影するように撮影装置10を制御する。
(もっと読む)
追尾装置及び目標へのセンサ割り当て方法
【課題】 弾道軌道目標に対する追尾性能を向上させる。
【解決手段】 目標類別・センサ制御処理部80は、RCS算出処理部60からのRCSがついた航跡諸元と統合航跡諸元の中から、RCSのしきい値よりも大きいRCSを持つ航跡諸元と統合航跡諸元を抽出し、抽出したRCSの大きい航跡諸元と統合航跡諸元に関連するレンジ方向及びクロスレンジ方向のセンサ配置情報を用いて、目標の進行方向がレンジ方向のセンサの観測ビームを集中的に割り当てるセンサ制御信号をセンサ群20に出力し、目標の速度ベクトルにより弾頭とブースターを類別し、弾頭に観測ビームを集中的に割り当てるセンサ制御信号をセンサ群20に出力する。
(もっと読む)
レーダ装置
【課題】 予め運動を想定することが困難な高機動目標に対する検出性能を改善することのできるレーダ装置を得る。
【解決手段】 ピーク信号に相当する相対速度を選択信号相対速度計測手段103で計測し、この相対速度に基づいてコヒーレント処理が可能な時間間隔毎の位相変化量を選択信号位相変化量算出手段104で算出する。更に、位相変化量を用いてピーク信号の位相を選択信号位相補償手段105で補償し、この補償後の位相と、ピーク信号の振幅値とから位相補償されたピーク信号を信号再構成手段107で再構成する。次に、積分手段108で、再構成されたピーク信号を加算し、この加算信号を閾値と比較して目標の有無を判定する。
(もっと読む)
移動速度検出装置
【課題】車両等に搭載された移動局の移動速度を簡単且つ確実に求めることが可能な移動速度検出装置を提供する。
【解決手段】車両等に搭載された移動局21が発射する電波の周波数Foが周囲の構造物22、23により反射される電波をアンテナ101および受信機102で受信し、周波数変換部103で周波数変換し、A/D変換部105でデジタル変換し、データバッファ108に一時格納する。このデータをTFT処理部109で高速フーリエ変換し、TH検出処理部110で所定閾値以下のデータを除去して、周波数偏移算出部112で最大ドップラ周波数Fmaxおよび最小ドップラ周波数Fminを求め、これらFmaxおよびFminに基づき速度成分検出部113で移動局の移動速度を算出する。
(もっと読む)
複数の物体の距離及び相対速度の測定のための方法及び装置
時間的に線形の周波数ランプをもつ送信信号を発射し、物体で反射した受信信号を受信して送信信号と混合することによる、FMCWレーダを用いた複数の物体の距離及び相対速度の測定のための方法及び装置。各物体についての各周波数ランプのミキサ出力周波数に対して、距離値と相対速度値との組合せが割り当てられ、距離と相対速度との複数の組合せの交点から、考えられる物体の距離及び相対速度が決定され、その際、考えられる物体は、アンビギュイティのための見せかけの物体、又は現実の物体でありうる。アンビギュイティによる見せかけの物体は、その次の測定サイクルにおいて少なくとも1つの周波数ランプの周波数勾配をランダムに変化させることによって、消去される。 (もっと読む)
レーダ装置
【課題】 相対速度に依存せずに安定して距離計測を行う。
【解決手段】 目標物に対する相対速度及び距離を計測するレーダ装置であって、前記相対速度が大きい場合に適した方法で相対速度及び距離を計測する第1の計測手段と、前記相対速度が小さい場合に適した方法で相対速度及び距離を計測する第2の計測手段と、前記第1の計測手段と第2の計測手段とを相対速度の大きさに基づいて切り替える制御手段とを備え、該制御手段は、所定の閾値と相対速度とを比較し、相対速度が閾値より大きければ前記第1の計測手段を選択し、相対速度が閾値以下であれば第2の計測手段を選択する、という手段を採用する。
(もっと読む)
FM−CWレーダ装置および同装置のノイズ抑制方法
【課題】FM−CWレーダ装置において、複数の装置間の電波干渉によって発生するスパイク状のノイズ成分を効果的に抑止すること。
【解決手段】連続波に周波数変調を施したFM−CW信号を送信信号として用い、受信信号と送信信号との差信号であるビート信号に基づいて目標物の相対距離、相対速度および方位の1つ以上を出力するFM−CWレーダ装置において、ビート信号をディジタル変換したディジタルビート信号に含まれるスパイク状のノイズ成分を抑制するためのスパイクノイズ抑制手段が具備され、このスパイクノイズ抑制手段によって、ディジタルビート信号の時系列データ上の一のデータと当該一のデータの直前データとの差分出力データに基づいてディジタルビート信号にスパイク状のノイズ成分が含まれているか否かが判定される。
(もっと読む)
ネットワークレーダシステム
【課題】 従来のネットワークレーダシステムでは複数レーダを管理・制御する為に中央処理系の存在を前提としていた。この為、1箇所の中央処理装置の過負荷による性能劣化と機器障害によるダウン、また当該中央処理系に繋がるデータ伝送回線へのデータ集中度が各レーダ装置とを結ぶ他のデータ伝送回線に比し高く、システム全体としてバランスに欠け、ネットワーク障害に対する脆弱性の問題があった。
【解決手段】 レーダ装置10に複数レーダ管理制御サブシステム20を付置し、また各種のデータを表示する表示装置22とデータ蓄積装置23が接続される。これら一連のシステムによりレーダサブシステム200を構成し、通信制御装置30を介してネットワーク60へ接続し、これらレーダサブシステム200の集合体がネットワークレーダシステム100を構成する。さらに、隣接レーダサブシステム同士をネットワーク予備回線50で接続した。
(もっと読む)
追尾モデルの管理
たとえばレーダによって検出された航空機など、遠方の目標の複数の軌跡を同時に維持する方法および装置が開示されている。それぞれの軌跡は、追尾目標についての、考えうる様々な力学的特性を示すモデルプロセスのセットにより、維持される。モデルは、完全にまたは大部分、互いに独立に振る舞うことができる。新たなセンサ情報を用いてモデルを更新するべきか否かは、それぞれの軌跡内のそれぞれのモデルについて、別個に決定される。 (もっと読む)
誘導装置
【課題】 従来は、目標に向け電波を送信し、目標から直接反射信号を受信して目標信号を検出し追尾しており、目標からの反射波が海面や地表面等のクラッタ信号の受信時、目標方向と異なる方向に目標がいると認識しマルチパスを追尾し、誤ロックしていた。
【解決手段】 従来、単一偏波での送受信を行っていたが、本方式は、水平偏波による送受信(HH信号)と垂直偏波による送受信(VV信号)の2種類の偏波方式での送受信方式とした。目標からの直接反射波と、海面や地表面を経由するクラッタ反射波(マルチパス)では、HH信号とVV信号で位相差が180度ずれる。この位相差を用いて信号処理することにより、目標からの直接反射信号とクラッタ反射波(マルチパス)を分離し、クラッタ反射波(マルチパス)の影響を受けずに目標に追尾し、ロックオンを保持することが可能になる。
(もっと読む)
レーダ装置
【課題】 目標の重要度に応じたビーム分配により探知と追尾を同時に行うことで両者の性能を向上させたレーダ装置を提供する。
【解決手段】 探知された目標の航跡が追尾すべきTBMなどの移動体の航跡に合致する度合いに応じて、追尾に割り当てるビーム数を決定するための重要度を求める重要度算出器8と、重要度に応じて探知と追尾にそれぞれ割り当てるビーム数を算出するビーム分配数算出器10と、ビーム分配数算出器10が算出した分配数に従って探知及び追尾のビーム割り当てを制御するビーム制御部9とを備える。
(もっと読む)
1,101 - 1,120 / 1,238
[ Back to top ]