
Fターム[5J070AC06]の内容
レーダ方式及びその細部 (42,132) | 測定量 (6,664) | 速度 (1,297)
Fターム[5J070AC06]の下位に属するFターム
Fターム[5J070AC06]に分類される特許
1,121 - 1,140 / 1,238
FM−CWレーダ装置および同装置のノイズ抑制方法
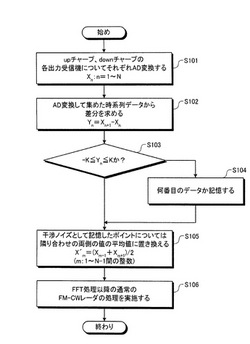
【課題】FM−CWレーダ装置において、複数の装置間の電波干渉によって発生するスパイク状のノイズ成分を効果的に抑止すること。
【解決手段】連続波に周波数変調を施したFM−CW信号を送信信号として用い、受信信号と送信信号との差信号であるビート信号に基づいて目標物の相対距離、相対速度および方位の1つ以上を出力するFM−CWレーダ装置において、ビート信号をディジタル変換したディジタルビート信号に含まれるスパイク状のノイズ成分を抑制するためのスパイクノイズ抑制手段が具備され、このスパイクノイズ抑制手段によって、ディジタルビート信号の時系列データ上の一のデータと当該一のデータの直前データとの差分出力データに基づいてディジタルビート信号にスパイク状のノイズ成分が含まれているか否かが判定される。
(もっと読む)
ネットワークレーダシステム

【課題】 従来のネットワークレーダシステムでは複数レーダを管理・制御する為に中央処理系の存在を前提としていた。この為、1箇所の中央処理装置の過負荷による性能劣化と機器障害によるダウン、また当該中央処理系に繋がるデータ伝送回線へのデータ集中度が各レーダ装置とを結ぶ他のデータ伝送回線に比し高く、システム全体としてバランスに欠け、ネットワーク障害に対する脆弱性の問題があった。
【解決手段】 レーダ装置10に複数レーダ管理制御サブシステム20を付置し、また各種のデータを表示する表示装置22とデータ蓄積装置23が接続される。これら一連のシステムによりレーダサブシステム200を構成し、通信制御装置30を介してネットワーク60へ接続し、これらレーダサブシステム200の集合体がネットワークレーダシステム100を構成する。さらに、隣接レーダサブシステム同士をネットワーク予備回線50で接続した。
(もっと読む)
スポーツボールの回転パラメータの決定
ゴルフボールの回転軸や回転速度のような、スポーツボールの回転パラメータを決定する方法である。回転軸は飛んでいるボールの軌跡からのみで決定され、回転速度はレーダーによって得られた信号の振動数解析から決定され、このような信号は振動数が等間隔に位置するスペクトルトレースを含んでおり、このような振動数の距離は回転速度に関連している。  (もっと読む)
(もっと読む)
気象レーダシステム及びそれに用いられる信号処理方法
【課題】 安定した性能により受信した信号の有意性を判定可能とする。
【解決手段】 発射した電波の反射信号を受信して受信強度情報を検出し、この受信強度情報を用いて気象情報を取得する。受信した反射信号について直交位相検波を行う直交位相検波部11と、該直交位相検波部11の出力について高速フーリエ変換処理を行ってパワースペクトラムを求めるFFT処理部12と、前記FFT処理部12の出力に基づいて受信信号のトータルパワーを算出するトータルパワー算出部13と、前記FFT処理部12の出力したスペクトラムをIQ平面においてベクトル合成するベクトル合成部14と、算出されたトータルパワーと合成されたベクトルとに基づき、前記受信した信号に含まれるノイズ成分量を検出して、前記受信信号の有意性を判定する判定部15とを具備する。
(もっと読む)
物体認識装置及び方法
【課題】 少ない演算量で、被検出対象のデータが混在しても安定して物体の形状を認識することができる物体認識方法、及びこの方法を用いた物体認識装置を提供する。
【解決手段】 移動体周辺に存在する物体を認識する物体認識装置であって、物体の表面形状情報を検出する物体検出手段1と、物体の輪郭形状を認識する形状認識手段2と、を備え、この形状認識手段2は、表面形状情報を構成する標本群から任意に抽出した標本に基づいて定めた形状モデルに対する標本群の一致度を演算して前記輪郭形状を認識する。
(もっと読む)
目標識別装置
【課題】レーダで得られる画像データを対象に、形状や運動が似ている目標間での類識別を実現する目標識別装置を得る。
【解決手段】追尾データとレーダ観測諸元データとに基づいて、目標の運動あるいは姿勢に関する目標パラメータ推定値を推定する目標パラメータ推定器1と、候補目標の3次元形状データである目標別諸元データと、レーダ観測諸元データと、目標パラメータ推定値とに基づいて、候補目標ごとの辞書時系列画像列データを生成する辞書時系列画像列生成器2と、種類不明の目標をレーダで観測して得られた観測時系列画像列データと、辞書時系列画像列データとに基づいて、観測時系列画像列データに含まれる種類不明の目標の種類判別を行う種類判別器3とを備える。
(もっと読む)
障害物検出装置
【課題】障害物検出装置での障害物検出処理において、演算オーバーヘッドの増大を抑制するとともに、歩行者などの障害物の誤検出や未検出の件数を効果的に削減すること。
【解決手段】 検出結果照合手段160は、距離・方位・相対速度検出手段150の検出結果と立体物検出手段110の検出結果との間で矛盾があった場合に、適応制御の実行指令を発行する制御手段を備えている。即ち、検出結果照合手段160は、その適応制御の実行指令を意味するフィードバック信号S1を検出範囲限定手段141とビーム方向・形状演算手段142に出力する。ビーム方向・形状演算手段142は、ミリ波レーダを構成する各個別アンテナの各受信信号の重み係数Am (複素数;1≦m≦M)を立体物検出手段110の検出結果に適応させて変更する。レーダービーム制御122は与えられた重み係数Am に基づいて各方向毎の探索データ(受信信号)に関する総和を生成する。
(もっと読む)
無線センシング装置及び無線センシング方法
【課題】 車載レーダ等の各種センシング装置において、コストの上昇及び消費電力の増大を低く抑えながらも距離精度を高めることができると共にセンシング距離を長くすることができるようにする。
【解決手段】 無線周波数帯の信号を発振する発振器101を間欠的且つ発振動作期間を変えて発振動作させ、発振動作期間の信号を送信アンテナ503より空中へ放射すると共に、空中へ放射した送信波が被測定物1000を反射して戻ってくる反射波を受信アンテナ504にて受信し、受信した反射後と先に送信した送信波とに基づいて被測定物1000に対する距離を求める。これにより、送信ピーク電力を高くすることなく近距離における高い距離分解能の無線センシングと遠距離の無線センシングの性能を実現することが可能となる。
(もっと読む)
レーダ装置とその信号処理方法
【課題】エコー反射強度のばらつきにを低減しターゲットの速度を高い精度で算出することの可能なレーダ装置とその信号処理方法を提供すること。
【解決手段】PRFを切り替え可能なレーダ装置にあって、PRFごとの位相回転量がターゲットのドップラー速度に比例するということに基づいて、受信したパルスエコーの位相回転量を基準値であるPRFに基づく値に補正するようにする。これによりPRFによらず速度算出に係る受信データを統一的に扱えるようにし、より多くの受信データを用いてターゲットのドップラー速度を算出するようにする。したがって、エコー反射強度のばらつきを平均化する効果を高められ、速度算出の精度を向上させることが可能になる。
(もっと読む)
移動予測表示装置およびレーダシステム
【課題】様々な形状の物標についても、観測者が物標の移動予測結果を把握することが容易である移動予測表示装置およびレーダシステムを提供する。
【解決手段】画像データ生成部16は、測位レーダ部12で取得された測位データに基づいて画像データを生成し、測位画像データ記憶部18に入力する。切り出し部20は、観測しようとする面、すなわち切り出し面のデータを測位画像データ記憶部18から取り出し、画像合成部24および表示判定部26に入力する。表示判定部26は、物標の像が移動する様子によって物標の移動予測の結果を表示することが可能であるか否かの判定を行う。一方、ドップラレーダ部14は、切り出し面内での物標の移動速度を算出し、画像合成部24に入力する。画像合成部24は、表示判定部の判定結果に従って物標の移動予測の結果を表示する画像データを生成し、画像表示部30に入力する。
(もっと読む)
自動車用レーダーシステム
レーダーセンサ(10)と、車両の周囲にある対象の距離(D)と相対速度(V)を測定する評価装置(12)と、測定された距離と相対速度を用いて差し迫った衝突を認識して、予測される衝突時点(Tc)と衝突速度(Vc)に関するデータをプリクラッシュシステム(20)へ供給する衝突認識装置(18)とを有する自動車用レーダーシステムは、レーダーセンサ(10)が、衝突認識装置(18)によって速度測定モード(CW)へ切り替え可能であって、速度測定モードにおいて相対速度(V)のより正確な測定が行われることを特徴とする。 (もっと読む)
レーダ装置とその信号処理方法
【課題】折り返し補正ミスを低減できるようにし、これによりターゲットの速度を高精度かつ高い信頼性で算出することの可能なレーダ装置とその信号処理方法を提供すること。
【解決手段】PRFを切り替え可能なレーダ装置にあって、PRFごとの位相回転量がターゲットのドップラー速度(PRF)に比例するということに基づいて、受信したパルスエコーの位相回転量を基準値であるPRFに基づく値に、複数の折り返し条件で補正する。これにより得られた補正位相角データに基づく速度ベクトルをベクトル合成し、その絶対値が最大となる状態を、速度折り返しの発生状態として採用するようにした。
(もっと読む)
運転支援装置
【課題】 車両にレーダ装置を設置し、自車に接近する危険度の高いターゲットを見失うことなく追尾して警報し、確実にドライバーをサポートする運転支援装置を提供する。
【解決手段】 水平方向に回転する折りたたみ機構を有するドアミラーケース31L,31Rの内部にレーダ1LD,1RDを設置し、ドアミラーケース31L,31Rの折りたたみ機構を利用して回転させる。これにより、危険度の高いターゲット6をできるだけ長い時間観測し、ドライバーに警報・表示を行う。また、レーダの検出結果から、前方には、自車15が通り抜ける幅がないと判断した場合には、車両後方を視野とする撮像装置を起動し、ドライバーに対して後方の映像を表示して、後退時の後方認知の支援を行う。
(もっと読む)
自動吐水制御装置
【課題】 如何なる方向から移動してくる物体であっても、その有無を正確に検知して吐水のオン/オフ制御が行え、物体の誤検知による誤作動を防止できるようにする。
【解決手段】 コントローラ部は、マイクロ波センサ5から出力されるドップラ信号に基づいて、手が所定空間領域に進入したか否か判断し、手が存在すると判断したら、電磁バルブ開の制御信号を出力することにより吐水口3cを通じて水を吐水させる。電波ビームの放射方向が放射方向11にスキャニングされている状態で、センサ5から対象物検知信号が出力されると、その対象物を洗浄のため吐水口3cの略直下の空間領域に向かって進入しようとする手であると判別し、吐水口3cが現在吐水中であれば吐水を継続すべく、未だ吐水を行っていなければ吐水を開始すべく、電磁バルブに制御信号を出力する。
(もっと読む)
少なくとも1つの側方および後方の周辺状況捕捉装置を有する自動車用の危険検知システム
本発明は、少なくとも1つの、側方および後方の周辺状況捕捉装置を有する、自動車用の危険検知システムに関する。本発明は、少なくとも1つの、側方および後方の周辺状況捕捉装置、周辺状況解釈装置および運転者反応支援装置を有する、自動車用の危険検知システムであって、周辺状況捕捉装置が、本危険検知システムを搭載した自動車に対して相対移動する移動対象物を捉えるシステムに関する。この危険検知システムは走行方向に逆向きに配置されている2つのセンサを有している。このシステムはデータの算出用として、センサ毎に少なくとも1つの評価および解釈ユニットを有している。  (もっと読む)
(もっと読む)
FMCWレーダ装置
【課題】他のレーダ装置との干渉の発生を精度良く判定することが可能なFMCWレーダ装置を提供すること。
【解決手段】対象物を検出すべき検出距離範囲に対応する周波数よりも高い高周波領域に属する周波数成分も出力されるように、上昇区間ビート信号及び下降区間ビート信号に対して高速フーリエ変換処理を行う。周波数上昇区間及び周波数下降区間のビート信号の周波数スペクトルデータを用いて、所定の高周波数範囲に属する周波数成分の強度の積分値を求め、いずれかの強度積分値が干渉判定閾値を越えている場合に、他のレーダ装置との干渉が発生したと判定する。
(もっと読む)
ガードビームを有する車輌レーダーシステム
第一のアンテナ(22)及びガードアンテナ(24)を備えた車輌(16)中の予測衝突レーダーシステム(10)であって、放射パターン(44、46)がオーバーラップしており、ガードアンテナ(24)の放射パターン(44)は第一のアンテナ(22)の放射パターンよりも広い。第一のアンテナ及びガードアンテナからの信号の比較(718,120)が車輌(16)の脅威となりそうでない標的の除外を提供する。第一のアンテナ(22)の第一の実施例はマルチビームアンテナ(22.1、22.2)であって、電磁レンズ(40、56)が例えば誘電体(40、40.1)または平面(56)であって、前方放射エレメント(58)からの信号が、それらと整列したガードアンテナ(24)からの信号と比較される。他の実施例では、電磁レンズ(70)は、ガードアンテナ(24)と協働して放射パターン(44.1’)の方向を変化させる。  (もっと読む)
(もっと読む)
誘導弾システム
【課題】 妨害波を発射しながら進入する航空機等の目標に対して、システム規模を増大させることなく、かつ1つの射撃単位のシステム構成で対処する誘導弾システムを得る。
【解決手段】 射撃統制装置2内のレーダ波送受信部(1)21からのレーダ波により対象目標を探知し、その目標情報を信号処理部22で取得し、さらに目標位置予測部23を設けて、目標情報から対象目標の位置を得る。そして、対象目標からレーダ波に対する妨害波が発射され目標情報の取得が妨害されている状況では、妨害波の到来角度情報を継続して取得し、これを既に妨害波のない状況で取得済みの位置に対する予測処理のパラメータとして適用することによって、継続的に対象目標の位置を得る。
(もっと読む)
ドップラ効果を用いた速度計測方法及びドップラ速度計
【課題】ドップラ速度計で、被計測物体に発射する送信波の周波数が低い場合であってもドップラ周波数を増大させることができ、高分解能で速度を検出可能とする。
【解決手段】被計測物体1に向かって発射された送信波tを被計測物体1と反射体3とで複数回反射させることで、前記送信波tに生じるドップラ周波数を増大させ、この増大したドップラ周波数を基に前記被計測物体1の速度を算出する。
(もっと読む)
小便器洗浄装置
【課題】 マイクロ波ドップラーセンサーを用いた小便器において、排水の影響による小便器の封水面の変動、対面設置の大便器ブースのドア開閉等の外乱の影響による人体誤検出を防止する小便器を提供する。
【解決手段】 小便器の前方に向けて送受信を行うマイクロ波ドップラーセンサーと、その受信出力を第1の周波数フィルターからの第1人体検出出力と、第2の周波数フィルターからの第2人体検出出力と、第1人体検出出力及び第2人体検出出力による接近検出判断値と、接近検出判断値と比較して判断する接近判断手段と、接近判断手段を有する制御部とを備えた小便器洗浄装置において、制御部は受信出力から第3の周波数フィルターからの尿流検出出力と、尿流の有無の判断となる尿流検出判断値と、尿流の有無を判断する尿流検出手段を有するとともに、尿流検出手段の出力に応じて接近検出判断値を更新する。
(もっと読む)
1,121 - 1,140 / 1,238
[ Back to top ]