
Fターム[5J070AC06]の内容
レーダ方式及びその細部 (42,132) | 測定量 (6,664) | 速度 (1,297)
Fターム[5J070AC06]の下位に属するFターム
Fターム[5J070AC06]に分類される特許
1,181 - 1,200 / 1,238
生物の身体または身体内の位置および/または運動を、レーザ支援してセンシングする方法
本発明は、生物の身体または身体内部の身体部分の位置および/または運動に関する情報をセンシングするためのシステムに関するものであり、とりわけ自動車で使用される。この方法は、本発明によりレーダ領域の周波数を有する電磁信号(15)を生物の所定の身体領域に送信(18)するステップ、
身体領域から反射された電磁信号(22)を受信(20)するステップ、
受信した受信信号(22)を、送信信号(15)に対する伝搬時間差および/または周波数差に関して評価(30)するステップを有する。
本発明の方法により、呼吸および心拍、並びに自動車の運転者の身体の位置が走行中に監視される。 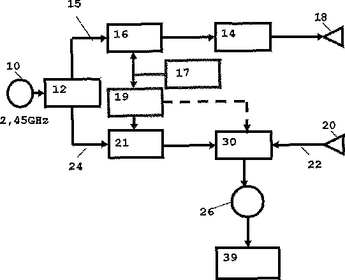 (もっと読む)
(もっと読む)
レーダ装置における温度補償改善
レーダ・ベースの距離測定装置は、マイクロ波周波数信号を生成する周波数発生器を備え、マイクロ波周波数信号の周波数が周波数発生器に供給された変調信号により決定される量だけ変調されるマイクロ波回路と、マイクロ波回路の少なくとも一部の温度を測定する温度センサと、駆動信号とマイクロ波検出器により検出されたエコー信号とから導出された情報を用いて温度センサの出力を処理して、補償された温度信号を生成する補償手段と、補償された温度信号を受け取り且つ周波数発生器により発生された信号の周波数を調整することにより周波数発生器の温度変化の効果を少なくとも部分的に補正するよう適合された周波数調整手段とを備える。補償手段がエコー信号から導出された情報を用いて閉ループにおける温度センサの出力を変更するので、周波数調整手段が、周波数発生器により出力される周波数を調整して、それを、その温度変化にも拘わらず出来るだけ理想の一定値近くに保つことができる。  (もっと読む)
(もっと読む)
レーダ装置

【課題】 位相モノパルス方式のレーダの高周波部品の数を削減するとともに測定精度を向上する。
【解決手段】 三角波の第1周期においては、スイッチ22で受信アンテナとしてアンテナAT0とAT1を交互に選択してスイッチ30でAT0からの信号を第1の処理系へ、AT1からの信号を第2の処理系へ振り分ける。三角波の第2周期においては、AT1とAT2を交互に選択してAT1からの信号を第1の処理系へ、AT2からの信号を第2の処理系へ振り分ける。三角波の第3周期においては、AT2とAT0を交互に選択してAT2からの信号を第1の処理系へ、AT0からの信号を第2の処理系へ振り分ける。
(もっと読む)
レーダ装置

【課題】 位相モノパルス方式のレーダの高周波部品の数を削減する。
【解決手段】 スイッチ22により2つの受信アンテナを交互に選択して選択された受信信号を受信増幅器26で増幅してミキサ28で送信信号の一部と混合する。ミキサ28から出力されるビート信号はスイッチ30により2つの処理系へ振り分けられる。
(もっと読む)
オブジェクトの間隔及び速度測定のための装置
本発明はレーダパルスによるオブジェクトの間隔及び速度を測定するための装置に関し、これにより送信及び受信されるレーダパルスは互いに受信側のミキサ(8)において相関される。レンジゲートを設定するための制御装置(7)において、ミキサ(8)に供給される送信側のレーダパルスはそのパルス遅延に関して連続的に上昇及び/又は下降して変化可能である。切り換え装置はドップラー周波数測定モードに切り換えられるか又は距離測定モードにリセットされる。 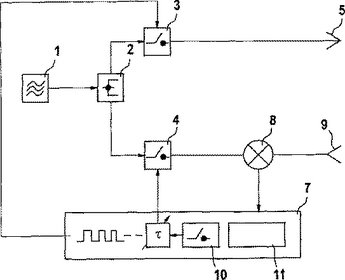 (もっと読む)
(もっと読む)
対象物検出システムの信号またはデータを評価する方法および装置
殊に自動車用の対象物検出システムを提案する。ここではレーダセンサによって、対象物から反射されたレーダ信号が、対象物の距離(d)および/または相対速度または接近速度(Cv)を求めるために処理される。最初の評価機会が距離信号(d)または接近速度信号(Cv)として生じるまでレーダセンサの少なくとも1つのチャネル(I,Q)のデジタル信号を処理し、距離信号(d)または接近速度信号(Cv)としての評価に対するモード切り換え(4)を行い、当該切り換えによって、どのデータが求められるのかが定められ、レーダセンサと後続接続された制御装置(7)との間のインターフェース(6)に供給される。  (もっと読む)
(もっと読む)
周波数変調レーダの信号処理装置
【課題】ディジタル信号重畳に起因したビート信号上の不要信号誤検知を良好且つ適応的に抑制した周波数変調レーダの信号処理装置を得る。
【解決手段】ビート信号Bの周波数解析部1と、周波数解析部1の解析結果から目標物体を検出する目標検出部2と、周波数解析部1の解析結果からランダム雑音のレベルNiを検出するランダム雑音レベル検出部6と、周波数解析部1の解析結果からランダム雑音以外の不要信号のレベルUiを検出する不要信号レベル検出部3と、ランダム雑音・不要信号の各レベルNi、Uiに基づいて、不要信号除去用のスレッショルド値ThUを設定するスレッショルド値設定部5とを備えている。
スレッショルド値設定部5は、不要信号の発生が既知のビート周波数に対しては、不要信号・ランダム雑音の各成分の大きさからスレッショルド値ThUを設定し、目標検出部2は、スレッショルド値ThUを用いて目標物体を検出する。
(もっと読む)
移動物体検出装置及び移動物体検出方法
【課題】 自車両の走行時においても、物標が静止物体か移動物体かの判別を行う。
【解決手段】 送信信号と受信信号とをミキシングして受信IF信号を生成するミキサ回路9と、受信IF信号を周波数解析するFFT処理手段42と、自車両速度情報からドップラシフト量を算出する周波数オフセット量算出手段43と、送信周波数上昇部分の受信IF信号の周波数スペクトルにドップラシフト量だけ正の周波数オフセットを加えて上昇オフセット周波数スペクトルを求め、同じく送信周波数下降部分にもドップラシフト量を加えて下降オフセット周波数スペクトルを求める周波数オフセット手段44と、上昇オフセット周波数スペクトルと下降オフセット周波数スペクトルとの差分演算で差分周波数スペクトルを求め、前方物標の判別を行う移動物体検出ロジック手段45とを設けた。
(もっと読む)
物体から反射された電磁的な信号を検出する方法および装置
【課題】明瞭さおよび信号の集束に関して受信アンテナによる検出を改善すること。
【解決手段】方法に関しては、間隔(d)を、明瞭領域の境界がサイドローブを通るように、選択すること、および反射する物体を、受信アンテナ(3,4)の信号のベクトル和によって検出することを特徴とする。装置に関しては、明瞭領域の境界がサイドローブを通るときの間隔(d)と、受信信号(3,4)によって受信された信号のベクトル和を形成する手段とを特徴とする。
(もっと読む)
レーダ装置用メモリチェック装置及び、メモリチェック装置を搭載したレーダ装置
【課題】 システム運用状態においてもレーダ装置のRAMのチェックが実施できるRAMチェック装置を提供する。
【解決手段】 LSI5は、高周波ユニット4にレーダ送信信号の出力を指示する。高周波ユニット4からレーダ受信信号を受信すると、計算処理をして結果をCPU6に出力する。CPU6は、計算した距離などを外部に出力する。LSI5の処理終了検知部10がレーダ受信信号処理を終了検知すると、RAMチェック部9によりRAMチェックが開始される。RAMチェックが終了すると、高周波ユニット4にレーダ送信信号の出力を指示する。これにより、RAMチェックは、レーダ受信信号処理の間のLSI5の負荷が軽い状態で行われることとなり、システムの運用状態でRAMチェックをすることが可能となる。
(もっと読む)
車載用電波式レーダ装置及びその製造方法
【課題】外筐体に設けられる外部接続コネクタと内部回路とを接続する伝送線を磁気シールドしつつ、外部接続コネクタを内部回路の位置に規制されることなく、自由に設置できるようにする。
【解決手段】外筐体60は、外筐体本体61と、その内周面に施されているシールド層62とを有して構成されている。内部回路からの伝送線73は、外筐体60のシールド層62の外周側を、このシールド層62に沿って所望の位置迄伸び、そこに外部接続コネクタ70が設けられている。
(もっと読む)
移動速度測定方法及び移動速度測定方式
【課題】限られた周波数帯域において,しかも単調な周期性信号を使って,移動局と固定局の間,或いは移動局間の相対的な移動速度を直接測定することを可能とする。
【解決手段】無線局1の送信手段103が周波数f1 の第1の波と周波数f2 の第2の波を無線局2に送信し,無線局2の周波数シフト手段202が,受信したそれぞれの波の周波数をシフトし,第1の波から周波数f3 の第3の波を,第2の波から周波数f4 の第4の波を生成し,送信手段203がそれぞれの波を無線局1に送信し,無線局1の周波数シフト手段105が,第1の波〜第4の波の,相異なる2組の2つの波を用い,それぞれ周波数をシフトして,周波数差が第1の無線局と第2の無線局間の相対移動速度に起因するドップラー効果で決められる第5の波と第6の波を生成し,測定手段106が,第5の波と第6の波の周波数差に基づいて,無線局1と無線局2間の相対移動速度を測定する。
(もっと読む)
ミリ波レーダ装置
【課題】 故障を的確に判定できるミリ波レーダ装置を提供する。
【解決手段】 上り・下り変調時ではない無変調状態のとき、例えば上り・下り変調の前をサンプリング範囲とし、このサンプリング範囲のときにビート信号を周波数解析する。そして、この周波数解析の結果から、自車速度に対応するFFT出力の信号レベルを想定される規定値と比較することで、高周波部が故障しているか否かを判定する。これにより、確実に高周波部の故障を検出することが可能となる。
(もっと読む)
レーダ装置
【課題】 MUSIC法やEsprit法などによって到来波数の推定を行うレーダ装置において、精度良く到来波数の推定が行えるようにする。
【解決手段】 到来波数推定処理の際に、信号処理部8に記憶しておいたビート周波数ごとのスレッショルドλTH1〜λTH256に基づいて雑音を考慮したスレッショルドλTHを設定し、このスレッショルドλTHに基づいて到来波の固有値λが信号空間の固有値λ1〜λLか雑音空間の固有値λL+1〜λKかを分別する。これにより、雑音を考慮に入れた上で、信号空間の固有値の数から到来波の数を正確に推定することができる。
(もっと読む)
車外監視装置、及び、この車外監視装置を備えた走行制御装置
【課題】誤認識を排除し、撮像手段とレーダ手段から取得できる可能な限りの多くの情報を用いて精度の良い制御を可能とする。
【解決手段】フュージョン立体物確認部18は、フュージョン立体物設定部17から入力される画像立体物単体のフュージョン立体物、ミリ波立体物単体のフュージョン立体物、画像立体物とミリ波立体物との組み合わせによるフュージョン立体物の全ての立体物に判定を行い、画像情報を基に予め定めておいた横方向の応答性遅れによるゴースト判定、壁反射によるマルチパスによるゴースト判定、及び、先行車からの反射波によるゴースト判定の条件を満たすミリ波立体物単体のフュージョン立体物を虚像であると判断する。この虚像との判定結果は設定時間維持される。こうして虚像と判断された立体物は、その後の制御対象からは除かれる。
(もっと読む)
ミリ波レーダ装置
【課題】 故障を的確に判定できるミリ波レーダ装置を提供する。
【解決手段】 制御部にて、スイッチが送信機による送信信号の出力をONしているときを通常サンプリング、スイッチが送信機による送信信号の出力をOFFしているときを故障検出用サンプリングとし、これらそれぞれのサンプリングの際において、ビート信号生成手段が生成したビート信号を周波数解析する。そして、通常サンプリングの際に周波数解析を行ったときのDC値と、故障検出用サンプリングのときに周波数解析を行ったときのDC値とを比較することにより、故障が発生しているか否かを判定する。
(もっと読む)
センサシステムの作動方法および作動装置
センサシステムの作動方法および装置を提示する。ここでは処理ユニットはセンサシステムの少なくとも1つのセンサと、通信接続手段を介して接続されている。さらにこの処理ユニットは少なくとも1つのセンサにデータを伝送する。このデータは、センサの少なくとも1つの検出領域および/または探知領域、および/またはセンサのモードを制御するための制御データをあらわす。  (もっと読む)
(もっと読む)
レーダ装置の軸ずれ検知方法および検知装置
【課題】 車両単体でレーダ装置の軸ずれ検知を行うことができるようにする。
【解決手段】 車両のレーダ装置取り付け位置前方であってレーダ装置100の検知方向とは異なる方向にある車体の一部に微小反射材を配置し、検知方向にアンテナの指向方向を一致させてレーダ装置100を車体101に取り付け、このようにして取り付けられたレーダ装置100を用いて微小反射材に関する基準データを取得し、車両の使用時にレーダ装置100によって微小反射材に関する使用時データを取得し、基準データと使用時データとを比較して比較結果が予め設定された一定値を超える場合レーダ装置100の軸ずれと判断する。
(もっと読む)
車速度測定システム
【課題】 特別な機器を設置しなくても車速度を測定することが可能なシステムを提供する。
【解決手段】 このシステムは、路上に設置された複数のアクセスポイント11と、路上を走行する車両12に搭載された無線端末13とを備えている。車両12がアクセスポイント11の設置点付近を通過する場合、受信信号強度(RSSI)は、車両12がアクセスポイント11に近づくにつれて徐々に増加し、アクセスポイント11に最も近づいた時点でピークに達し、アクセスポイント11から離れるにつれて徐々に減少する。そして、車両12の速度v[m/s]が速ければグラフのカーブは急峻となり、速度v[m/s]が遅ければグラフのカーブは緩やかになる。したがって、このようなRSSIの変化の度合いから車速度を算出することができ、さらには、RSSIのパターンの違いから、車両の上り・下りを判断することもできる。
(もっと読む)
車両周囲物体検出装置
【課題】グルーピングされた検出点のいずれかの相対位置に誤差が含まれている場合であっても、物体の相対位置を求めるときにその誤差の影響を取り除くことができる車両周囲の物体を検出する装置を提供する。
【解決手段】自車両前方の物体について、各検出点において位置座標を検出し(ステップS1)、所定の条件を満たす検出点同士をまとめて物体ごとに検出点のグループを作成し、グルーピングを行う(ステップS6、S10)。このグルーピングされた検出点のそれぞれについて、信頼性判断値R1(t)またはR2(t)を算出し(ステップS7、S11)、その値に基づいて、同一グループにグルーピングされた検出点から代表検出点を選択する(ステップS8、S12)。選択された代表検出点の相対位置に基づいて、物体の相対位置を決定する(ステップS9、S13)。
(もっと読む)
1,181 - 1,200 / 1,238
[ Back to top ]