
Fターム[5J070AE04]の内容
レーダ方式及びその細部 (42,132) | 測定対象 (3,193) | 航空機 (399)
Fターム[5J070AE04]の下位に属するFターム
ヘリコプター (10)
Fターム[5J070AE04]に分類される特許
361 - 380 / 389
誘導装置
【課題】 従来は、目標に向け電波を送信し、目標から直接反射信号を受信して目標信号を検出し追尾しており、目標からの反射波が海面や地表面等のクラッタ信号の受信時、目標方向と異なる方向に目標がいると認識しマルチパスを追尾し、誤ロックしていた。
【解決手段】 従来、単一偏波での送受信を行っていたが、本方式は、水平偏波による送受信(HH信号)と垂直偏波による送受信(VV信号)の2種類の偏波方式での送受信方式とした。目標からの直接反射波と、海面や地表面を経由するクラッタ反射波(マルチパス)では、HH信号とVV信号で位相差が180度ずれる。この位相差を用いて信号処理することにより、目標からの直接反射信号とクラッタ反射波(マルチパス)を分離し、クラッタ反射波(マルチパス)の影響を受けずに目標に追尾し、ロックオンを保持することが可能になる。
(もっと読む)
レーダー装置及び送信ビーム制御方法

【課題】 レンジ方向に関する分解能やクラッタ抑圧性能を低下させることなく、遠距離目標及び近距離目標を効果的に監視することができるレーダー装置を提供する。
【解決手段】 レーダー波を送信し、空中線を介して移動目標による反射波を受信するレーダー装置であって、所定のパルス諸元に基づいて送信パルス信号を生成する送信パルス信号生成手段と、送信パルス信号に基づいて、送信パルス数が異なる2以上の送信ビームをレーダー波として形成する送信ビーム形成手段と、送信パルス数が異なる各送信ビームを順次に走査するビーム走査制御手段と、受信信号に基づいて送信ビームごとにビデオ信号を生成する受信手段とを備え、ビーム走査制御手段が、ビデオ信号のデータ更新周期を送信ビームごとに異ならせて各送信ビームの走査を行うように構成される。
(もっと読む)
レーダ装置
【課題】 広帯域の電波の送受信を必要とせず、目標類別の精度が高い目標類別装置を得る。
【解決手段】 目標に送信信号を照射し、反射波を受信して受信信号を出力する送受信機20と、受信信号から目標の軌跡を推定する追尾処理部30と、受信信号を処理してクロスレンジプロフィールを生成するクロスレンジプロフィール生成部40と、クロスレンジプロフィールから特徴量を算出し、目標の類別を行う類別処理部50を備え、クロスレンジプロフィール生成部40は、オートフォーカス処理部42において受信信号のドップラー周波数の変化量を抽出し、アスペクト角変化量推定部44は、そのドップラー周波数の変化量を用いて目標のアスペクト角の変化量を推定する。そしてクロスレンジスケーリング部45において、アスペクト角変化量推定部44で推定したアスペクト角の変化量を用いてドップラープロフィールをクロスレンジプロフィールに変換する。
(もっと読む)
追尾モデルの管理
たとえばレーダによって検出された航空機など、遠方の目標の複数の軌跡を同時に維持する方法および装置が開示されている。それぞれの軌跡は、追尾目標についての、考えうる様々な力学的特性を示すモデルプロセスのセットにより、維持される。モデルは、完全にまたは大部分、互いに独立に振る舞うことができる。新たなセンサ情報を用いてモデルを更新するべきか否かは、それぞれの軌跡内のそれぞれのモデルについて、別個に決定される。 (もっと読む)
目標識別装置
【課題】レーダで得られる画像データを対象に、形状や運動が似ている目標間での類識別を実現する目標識別装置を得る。
【解決手段】追尾データとレーダ観測諸元データとに基づいて、目標の運動あるいは姿勢に関する目標パラメータ推定値を推定する目標パラメータ推定器1と、候補目標の3次元形状データである目標別諸元データと、レーダ観測諸元データと、目標パラメータ推定値とに基づいて、候補目標ごとの辞書時系列画像列データを生成する辞書時系列画像列生成器2と、種類不明の目標をレーダで観測して得られた観測時系列画像列データと、辞書時系列画像列データとに基づいて、観測時系列画像列データに含まれる種類不明の目標の種類判別を行う種類判別器3とを備える。
(もっと読む)
誘導弾システム
【課題】 妨害波を発射しながら進入する航空機等の目標に対して、システム規模を増大させることなく、かつ1つの射撃単位のシステム構成で対処する誘導弾システムを得る。
【解決手段】 射撃統制装置2内のレーダ波送受信部(1)21からのレーダ波により対象目標を探知し、その目標情報を信号処理部22で取得し、さらに目標位置予測部23を設けて、目標情報から対象目標の位置を得る。そして、対象目標からレーダ波に対する妨害波が発射され目標情報の取得が妨害されている状況では、妨害波の到来角度情報を継続して取得し、これを既に妨害波のない状況で取得済みの位置に対する予測処理のパラメータとして適用することによって、継続的に対象目標の位置を得る。
(もっと読む)
二次監視レーダ制御装置及び二次監視レーダ制御方法
【課題】航空機を確実に捕捉可能な二次監視レーダ制御装置及び二次監視レーダ制御方法を提供する。
【解決手段】 航空機の未来位置範囲が所定の切替値以下である場合、質問信号の単位時間あたりの送信回数を定めた送信回数基準値に則り質問信号を送信させ、未来位置範囲が基準値以上である場合、基準値に定められた値より減じた回数で質問信号を送信させる送信制御部91を設ける。
(もっと読む)
分散型のレーダ情報処理システム
【課題】システムの一部に故障が生じてもシステムの全面的な停止を回避することができ、システムの変更に対しても柔軟に対応でき、短期間で製造できる安価な分散型のレーダ情報処理システムを提供する。
【解決手段】レーダ装置から取得したレーダ情報を処理することにより航空管制に供する情報を生成する分散型のレーダ情報処理システムであって、流れるデータの種類に応じて設けられた複数のデータバス61〜64と、複数のデータバスで区切ることにより階層化された複数の層の各々に分散して割り当てられ、各々が自層を形成する2つのデータバスに接続されて所定の機能A〜機能Eを実現する複数のアプリケーションと、複数のアプリケーションの間の接続を制御する分散統合インタフェース30とを備えている。
(もっと読む)
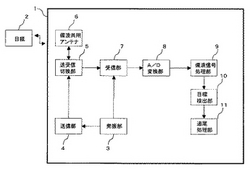
電波探知装置
【課題】 目標からの電波の周波数の同調に要する時間を短縮すること可能にする。
【解決手段】 到来が予測されるプラットフォームの種類を含む情報を所定の通信情報網から受信した場合に、到来電波予測同調制御手段により、プラットフォームの種別、搭載レーダの種別、レーダの電波諸元を格納するプラットフォームライブラリから、該当するプラットフォームの搭載レーダの電波周波数を抽出し、その周波数への同調を指示する同調制御信号を出力し、受信機同調手段は、通常時の掃引動作中に受けた同調制御信号で指示された周波数に優先的に同調し、目標からの電波を捕捉して電気信号を取り出し、受信信号諸元測定手段により、捕捉した目標の電波諸元を計測分析し、その電波諸元に基づいてプラットフォームライブラリを照合してレーダの種類を特定する。
(もっと読む)
レーダー装置のマルチパスによる疑似目標の判定方法及びこの判定方法を用いたレーダ監視装置
【課題】 レーダーの受信信号に含まれる不要信号のうち、レーダーから目標へ引いたいわゆるレーダー視線上の遠方側(レーダーと反対側)に発生するマルチパスエコーによる擬似目標を誤目標として識別する適当な方法がなかつた。
【解決手段】 得られた目標情報と、既に追尾している追尾目標とを1対1に対応付ける相関処理を行なう相関処理手段81を設ける。そしてどの追尾目標とも対応がない目標情報は新たな追尾目標とする。一方、レーダー視線上の目標情報の手前側(レーダー側)に既存の追尾目標4が存在し、尚且つ、当該目標情報を仮の追尾目標として追尾した結果が、マルチパスエコーによる擬似目標の固有のパターンを示すか否かを判定するマルチパス判定手段82を設け、固有のパターンを示すと判定した場合は、誤目標として棄却する。
(もっと読む)
干渉型レーダー
【課題】一般のレーダーと異なり、送信信号はパルスではなく、CWまたはFMCW信号であるため、レーダー用ではない一般通信用の送信モジュールを使用することができる。
【解決手段】目標対象物に向けて信号を送信する送信部Tと、目標対象物で反射する反射波を受信する受信部Rとを有している。前記送信部Tは、目標対象物の方位及び速度を検出するためのCW信号を送信アンテナ7から出力する。前記受信部Rは、前記送信部Tからの送信と同時に、目標対象物で反射した反射波を複数台の受信アンテナ8で受信し、受信信号に対してスペクトル解析を行い速度成分ごとの受信信号に分類する機能と、受信アンテナ系統の信号間の相関する機能と、前記相関処理された信号を積分する機能と、受信アンテナ間の信号の位相差からアンテナ面に入射する信号の位相面を求めて、その出力を2次元FFTしてターゲットの方位方向及び速度を計測する機能とを実行する。
(もっと読む)
モードSトランスポンダ送信信号解読装置及びモードSトランスポンダ送信信号解読方法
【課題】モードSトランスポンダから送信された信号を正確に解読することが可能なモードSトランスポンダ送信信号解読装置及びモードSトランスポンダ送信信号解読方法を提供する。
【解決手段】モードSトランスポンダ送信信号に対して微分処理を行う微分処理部43と、微分処理がなされた信号における強度の上昇変化率と下降変化率との相関の度合を演算する相関演算部44と、相関演算処理により得られた相関の度合に基づいてパルスを再生するパルス再生部45と、再生されたパルスに対してゲート処理と位相同期処理とを行うパルス位相同期部46と、ゲート処理と位相同期処理とがなされたパルスを基にモードSトランスポンダ送信信号を解読するパルス解読部47とを設ける。
(もっと読む)
目標追尾装置
【課題】検出信号の電力情報を用いて、目標の検出追尾精度の向上を図った目標追尾装置を得る。
【解決手段】追尾目標に対する受信信号から検出信号情報を生成する検出信号情報生成手段11と、検出信号情報履歴データおよび目標航跡データを蓄積するデータ記憶部13と、特定された検出信号群の電力積分結果を算出する信号電力積分手段14と、検出信号情報および目標航跡データに基づいて航跡の仮説群データを作成して、仮説群データの中から検出信号群を特定し、対応する電力積分結果を受け取り、種々の検出信号群に対する電力積分結果に基づいて仮説群データを修正して仮説群修正データを生成し、データ記憶部13の目標航跡データを更新する航跡作成手段12と、更新された目標航跡データに対して、所定の判定基準を満たすものを真の目標航跡として特定する目標判定手段15とを備える。
(もっと読む)
追尾装置
【課題】偽像を目標とする仮説を排除しながら、効率的に追尾処理を行うことができる追尾装置を得る。
【解決手段】各センサで得られた受信電波から目標に当たり反射した反射電波を抽出する波形抽出部4と、2つのセンサに反射電波が到達する時刻の差によって等距離差双曲面を計算し、別の2つセンサの組み合わせからも等距離差双曲面を計算し、さらに複数の等距離差双曲面の交点であって、目標の位置である測位情報を計算する測位情報計算部5と、前記測位情報に基づいて、目標の運動諸元を推定する追尾フィルタから算出される目標の航跡と、航跡の組合せにより仮説を生成し、追尾処理を実施する多重仮説生成追尾処理部61と、前記多重仮説生成追尾処理部によって生成された仮説中に、偽像を目標と見なす仮説が含まれているか否かを判定し、含まれている場合には前記偽像を目標と見なす仮説を除去する仮説絞込み部62とを設けた。
(もっと読む)
航空機騒音データ分析処理方法
【課題】航空機騒音のデータ分析において、騒音を自動測定するとともにかぶり音の除去を効果的に行う方法を提供する。
【解決手段】任意の日の任意の測定局の騒音データを騒音レベル波形の大きい方から順にソートして、最も大きい騒音レベル波形から表示装置に表示、及び/又は、音響再生装置で再生させると共に、WECPNL値又はLAeq等の値の騒音評価値に一定の寄与率を設定して乗じた数値以上の騒音レベル波形のみをオペレータが目視して航空機騒音以外の騒音を判断して削除する航空機騒音データの分析処理方法。
(もっと読む)
ビデオ合成装置及び方法
【課題】グラフィック画像とレーダ画像の表示の重要度に応じて画像合成を行う。特に、レーダ情報の更新ごとの動的変化を過去に遡るほど輝度を低くして多色塗りつぶしグラフィック表示上に表示する。
【解決手段】比較処理部109は、優先度判定部106から通知された画素の優先度と、輝度生成部A107と輝度生成部B108とから通知された輝度とに基づいて、画素の表示優先順位を定める。高優先度画素である場合は、最優先に選択される。中優先度画素である場合は、グラフィック情報の輝度Aと、レーダ情報の輝度Bとを比較しA≧Bのときはグラフィック情報(表示信号1)を、A<Bのときはレーダ情報(表示信号2)を選択する。低優先度画素である場合、輝度Bが0のときは画素データAを選択するが、輝度Bが0でないときは画素データBを選択する。選択された画素が合成画面となる。
(もっと読む)
二次監視レーダ装置とその質問送信方法
【課題】 SSRモードSの質問送信方式において、余分な質問を減少させ、他の質問を送信できる時間を確保する。
【解決手段】 質問送信の予測角度範囲をアンテナビーム幅と比較し(S1,S2)、質問を送信する予測角度範囲がアンテナビーム幅より狭い場合には、毎ロールコール期間、質問を送信する(S3)。これに対し、質問を送信する予測角度範囲がアンテナビーム幅より広い場合には、応答が受信できるまで、質問を送信する期間、質問を送信しない期間をそれぞれ設けるようにし(S4,S5)、応答が受信できた後、毎ロールコール期間、質問の送信を行う(受信エラーやダウンリンクが発生した場合も含む)(S6)。このように質問送信方式を変更した結果、応答が返る可能性の少ない方位への質問の送信を減少させることができるため、この時間を他の目標に対するトランザクションのスケジュールに使用することができるようになる。
(もっと読む)
マルチレーダシステム及びその制御方法
【課題】マルチレーダシステムの管制所に、航空機の正確な位置を正確に表示する。
【解決手段】GPS衛星1からのGPS信号をGPSアンテナ21、22で受信し、GPSクロック受信機31、32が正確な標準時刻(任意のタイムゾーン)をNTP(ネットワークタイムプロトコル)にてLAN91、92に出力する。LAN91、92に接続される信号処理プロセッサ41、42は、GPSクロック受信機31、32から出力される標準時刻を使用して、自身のシステムクロックを較正する。タイムスタンプ生成部101、102では、レーダ51、52で検出した航空機の位置情報に、航空機を検出した時刻をGPSクロックによるタイムスタンプとして付与する。タイムスタンプを付与された航空機位置データは、WAN6経由で情報処理装置7に伝送される。情報処理装置7では、レーダからの航空機位置データに対して、追尾処理(相関、予測、虚偽目標棄却)、位置算出処理を実行する。
(もっと読む)
二次監視レーダシステムとその地上装置
【課題】トランスポンダを確実に捕捉できるようにし、これにより航空機の安全運行への寄与を高め得る二次監視レーダシステムとその地上装置を提供すること。
【解決手段】エラー判定処理においてPIフィールドの値とサイトIDの比較に加え、PIフィールドの値と“0”との比較を行うようにしている。また、サイトIDまたは“0”のいずれと一致したかを区別するための分別情報を、応答信号に付加するようにしている。これにより、モードS専用オールコール質問に対してPIフィールドの値が“0”で応答する不良モードSトランスポンダを捕捉することが可能になる。
(もっと読む)
測高レーダ装置とその測角処理方法
【課題】 簡易な構成で、マルチパスによる測高精度の劣化を低減する。
【解決手段】 目標検出回路13で複数の受信ビームのいずれかから目標が検出されたとき、目標検出ビームの受信信号から検出目標の距離情報及び粗測角値を求める。測角用ビーム形成回路16は、粗測角値に対して所定仰角だけずらして指向方向を決定し、予め記憶した素子信号メモリ15から目標距離に応じて記憶した素子信号を読み出し、測角用ビームを形成する。目標検出位置と検出ビームによる概略測角結果を基に、再度指向仰角の異なる複数の受信ビームを形成して測角処理を行い、各ビームで測角した結果を平均化してマルチパスの影響による測高精度のばらつきを低減する。この際、このとき、素子信号をいったんメモリして必要なビームを再形成するので、再度複数ビームを形成するために新たな送受信を要しない。
(もっと読む)
361 - 380 / 389
[ Back to top ]