
Fターム[5J070AE04]の内容
レーダ方式及びその細部 (42,132) | 測定対象 (3,193) | 航空機 (399)
Fターム[5J070AE04]の下位に属するFターム
ヘリコプター (10)
Fターム[5J070AE04]に分類される特許
341 - 360 / 389
トランスポンダ送信信号2値化処理装置及びトランスポンダ送信信号2値化処理方法
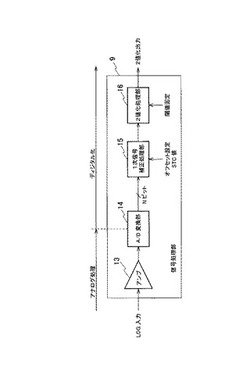
【課題】簡易的且つ長期間にわたって正確な2値化処理を行うことを可能とする。
【解決手段】
応答信号のLOGビデオ信号を増幅するアンプ13と、増幅されたLOGビデオ信号をデジタル信号に変換するA/D変換部14と、デジタル変換された信号に対して一次信号補正処理を行う一次信号補正処理部15と、一次信号補正処理がなされた信号に対して2値化処理を行う2値化処理部16とを設ける。
(もっと読む)
二次監視レーダ応答信号解析装置及び二次監視レーダ応答信号解析方法

【課題】応答信号の受信異常の有無を通知することが可能な二次監視レーダ応答信号解析装置及び二次監視レーダ応答信号解析方法を提供する。
【解決手段】応答信号を解読し、これが正常な信号であるか否かを判定する信号解読部18と、応答信号の全ての内容及び判定の結果を時刻と共に表示する表示部23と、判定の結果を時刻と共に記録する記録部21とを設ける。
(もっと読む)
空港面監視システムおよびこれに用いる航跡統合装置
【課題】 複数の目標検出装置を併用して空港面を監視する場合において、各目標検出装置の位置検出精度に応じた正確な統合航跡の座標位置を決定する。
【解決手段】 複数の目標検出装置を併用して空港面を監視し、前記複数の目標検出装置により検出された同一目標物についての航跡情報から統合航跡を生成して表示部に表示する空港面監視システムにおいて、空港面のセンターライン情報を蓄積したセンターラインデータベースからセンターライン情報を読み出し、そのセンターライン情報を用いて複数の目標検出装置により検出された各航跡情報の座標位置から基準センターラインまでの垂直距離をそれぞれ算出し、それら垂直距離に基づく重み付け割合により前記同一目標物について統合航跡の座標位置を決定する。
(もっと読む)
レーダ装置
【課題】目標が高速に移動しても、目標の探知確率や測角精度が劣化せず、誤警報が非常に少ないレーダ装置を提供する。
【解決手段】アンテナ3から得られるアナログ信号をディジタル信号に変換するAD変換部5と、AD変換部からの出力信号のリサンプルを行うリサンプリング処理部8と、リサンプリング処理部からの出力信号の周波数分析を行う周波数分析部6と、リサンプリング処理部からの出力信号の時間−周波数分析を行う時間−周波数分析部9と、周波数分析部からの出力信号と時間−周波数分析部からの出力信号とに基づき目標を検出する目標検出部7とを備える。
(もっと読む)
画像レーダ装置
【課題】不要な距離変化を推定する際に、同じレンジに存在する複数の反射点間の干渉の影響で増大する補償量の推定誤差を低減する。
【解決手段】レンジヒストリから時系列データを抽出する時系列データ抽出手段201と、短時間フーリエ変換を適用してドップラヒストリを生成するドップラヒストリ生成手段202と、短時間ドップラヒストリを切り出すヒストリ切出し手段203と、短時間ドップラヒストリからドップラ周波数の変化率を推定するドップラ変化率推定手段204〜206と、ドップラ周波数の変化率に基づいて目標とレーダとの間のレンジの変化を推定するレンジ変化算出手段207と、レンジの変化に基づいて補償量を算出する補償量算出手段208と、補償量に基づいてレンジヒストリの不要なレンジおよび位相の変化を補償する運動補償器21とを有する2次元フーリエ変換補償回路20を備えるものである。
(もっと読む)
電波誘導シーカ装置
【課題】 本発明は、目標との距離に応じて送信パルス幅を可変することで、近距離でのブラインド距離を短縮することができる電波誘導シーカ装置を提供することにある。
【解決手段】 目標からの反射信号を受信器21で受信して直交検波した後の受信信号に対して移動平均フィルタ53で移動平均処理を施し、この受信信号に対して利得調整器57で利得調整処理を施しておき、基本となるクロック信号を分周期器41で複数の段階に分周して得た何れか1つのリサンプルクロック信号に従って、この利得調整処理後の受信信号をリサンプル器63でリサンプルし、このリサンプル後の受信信号を予測距離演算器29で目標までの距離に関連付けた3種類のゲート信号の期間で通過させ、パルス幅制御器31でこの通過後の異なる信号間の誤差に基づいてパルス幅制御信号を生成し、送信器33でこのパルス幅制御信号に応じてパルス信号の幅を変更して送信する。
(もっと読む)
レーダ装置
【課題】 リアルタイム処理を保証しつつ、目標の探知および追尾を継続するレーダ装置を得る。
【解決手段】 検出範囲判定部14では、予めデータテーブルとして記憶された信号処理時間データ12、CPUより逐次入力されるCPU負荷率13、目標探知18から発生されるS/N比19、および追尾処理部20によって求められる追尾品質21に基づいて、予めデータテーブルとして記憶されたレーダパラメータ11の組み合わせの中から、レーダ装置におけるレーダ信号処理のリアルタイム処理を保証し、目標の探知および追尾を継続可能なレーダパラメータ17を一組選定し、信号検出部15に供給する。
このようにして、リアルタイム処理を保証しつつ、目標の探知および追尾を継続することができる。
(もっと読む)
航空機用レーダ・システム
使用中に自機を取り囲む領域内の少なくとも1つの監視可能なゾーンにある別の航空機を少なくとも検出するための設備を、航空機に設けるためのレーダ・システムであって、このシステムは、監視可能なゾーンごとに少なくとも1つのサブシステムを備え、サブシステムは、電磁探索信号を送信するための1つの送信器と、その探索信号の反射を受信するための少なくとも1つの受信器とを備え、送信器は、その航空機に対して静止した方向に探索信号を送信するように配列される。  (もっと読む)
(もっと読む)
レーダ装置
【課題】 モノスタティックレーダ局とバイスタティック受信局の片方もしくは両方が異なる移動プラットホーム上にある場合でも精度よく目標の位置や速度を推定することができるレーダ装置を提供する。
【解決手段】 モノスタティックレーダ局50のドップラ周波数A算出手段4により算出されたアンテナ1と目標40の間におけるドップラ周波数A及び送信周波数を通信手段5及び通信手段9を介してバイスタティック受信局51にリアルタイムに送り、これとバイスタティック受信局51において受信し計測した周波数情報とからドップラ周波数B算出手段10によりアンテナ6と目標40との間におけるドップラ周波数Bを算出する。
(もっと読む)
飛しょう体誘導装置
【課題】 旋回、ジンギング、ダイブなど高機動運動目標を誘導する場合、又は目標のベクトルから直線外挿により会合点を算出する場合、会合点が大きく振れ、飛しょう体速度を低下させ命中精度が悪化していた。また飛しょう体速度低下を防止するため、高機動運動目標に会合点が振れない様な追尾フィルタを用いた場合、飛しょう体が目標に対して終末誘導をする際のイニシャルヘディングエラーが大きくなり命中精度を悪化させていた。
【解決手段】 イニシャルヘディングエラー等の推定値に基づき、2種類の追尾フィルタを使い分けることにより、会合直前の高機動運動目標に対しては高感度の追尾フィルタを用い、イニシャルヘディングエラーの少ない誘導を行い、低機動運動の目標、または会合まで時間が掛かる目標に対しては低感度の追尾フィルタによる飛しょう体速度低下の少ない誘導を行う様にした。
(もっと読む)
レーダ画像シミュレータ装置
【課題】 実機の信号処理等に忠実な擬似のレーダ画像を生成して表示する一方、高速のシミュレーションを実現する。
【解決手段】 陰面消去処理部104により処理された陰面消去済みのポリゴンデータを用い、IQビデオ信号算出部109及びIQビデオ合成部110により実機レーダ装置が受信する実環境相当のビデオ信号を模擬し、さらにI/F模擬部111により算出した信号処理部112のI/F信号により信号処理部112を実機レーダ装置の信号処理部と同等に動作させるものである。
(もっと読む)
電波照射装置、および誘導装置
【課題】 海面からのマルチパスの影響によって、目標体に照射され目標体で反射される反射波のレベルが低下するという問題があった。
【解決手段】 目標体の存在方向、目標体高度および目標体までの距離の情報を計測し、計測した目標体の情報に基づいて、アレイアンテナ装置の送信ビームの指向方向を、目標体の存在方向から所定角度だけ上方にオフセットさせることによって、目標体に照射される電波に対するマルチパスの影響を緩和することができる。
(もっと読む)
レーダー装置
【課題】 受信系の構成を複雑化することなく、移動目標に対する測角精度を向上させたレーダー装置を提供する。
【解決手段】 移動体に搭載され、レーダー波を送信するとともに、指向性を有する空中線4を介して移動目標による反射波を受信し、受信信号に基づいて空中線4の指向方向を制御するレーダー装置1であって、受信信号を復調し、ビデオ信号を生成する受信機5と、移動体の移動速度に基づいて、移動体の移動によるビデオ信号の位相変動を補償する自機運動補償回路6と、受信信号に基づいて移動目標のレンジ方向に関する速度成分を求め、移動目標の移動によるビデオ信号の位相変動を補償する目標運動補償回路8と、各運動補償回路による位相変動補償後のビデオ信号に基づいて、ドップラー周波数を推定するドップラー周波数推定回路9と、ドップラー周波数に基づいて、移動目標の方位を判定する測角回路10により構成される。
(もっと読む)
撮影制御装置、撮影制御方法および撮影制御プログラム
【課題】 高速で移動する移動体(航空機)を自動で追尾撮影することを目的とする。
【解決手段】 管制装置30においてレーダーデータ処理装置32は、レーダー装置20が取得した航空機のレーダーデータを入力し、航空機の位置(緯度、経度、高度)や航空機の移動状態(方位、速度、加速度)を示すデータを取得する。カメラ制御装置35は、撮影装置10が実際に航空機を撮影する時刻とその時刻における航空機の位置とを入力データに基づいて特定する。このとき、カメラ制御装置35はカメラ制御装置35の処理時間、撮影装置10を制御するデータの伝送時間、撮影装置10の駆動時間、遮蔽物の存在、カメラ11の駆動範囲等に基づき撮影装置10が実際に航空機を撮影する時刻を特定する。また、航空機の移動状態に基づいてその時刻における航空機の位置を特定する。そして、特定した時刻において特定した位置を撮影するように撮影装置10を制御する。
(もっと読む)
多面体モデル作成装置およびレーダ装置
【課題】 多面体モデルを構成する平面の大きさを考慮して、目標の識別に用いる信頼度の揃った多面体モデルの作成を可能にする。
【解決手段】 多面体モデル生成手段により、外部より入力される目標の立体形状情報に基づいて、当該目標の多面体モデルを生成し、モデル評価手段により、多面体モデルの面数、立体形状情報に含まれた目標の表面積およびレーダの観測波の波長あるいは周波数に基づいて、目標を多面体モデルで表した場合の平面の平均面積を波長の二乗で正規化した値を算出し、この算出値と目標の種類に応じて定めた基準係数との差を算出し、この算出された差と予め設定した許容誤差と比較し、当該差が前記許容誤差以内であった場合にのみ、多面体生成モデル手段で生成された多面体モデルを形状データ蓄積手段に蓄積する。
(もっと読む)
電子走査レーダのビーム制御装置
【課題】 従来の複数のPAAを装備し各PAAで同時ビーム照射する同期型PARによる複数目標に対する追尾の同時ビーム照射方法は、目標の距離に応じて求めたPRIの長短を基に複数の群にグルーピングし、同一のグループごとに各PAA同時にビーム照射する目標の組合わせを求め、その目標に対するPRIの最大値を共通PRIとして使用し時間資源の消費を抑えるものであり、PRI共通化の他にヒット数共通化が必要となることによる時間資源の消費を考慮していないため、無駄時間を増加し、追尾可能目標数を劣化させる場合が生じるという問題がある。
【解決手段】 PRIの共通化による時間資源の消費のみではなく、ヒット数の共通化による時間資源の消費を考慮して同時ビーム照射する目標の組合わせを選定することにより、無駄時間を抑え、追尾可能目標数を極力劣化させないようにした。
(もっと読む)
アクティブな防御デバイスならびに関連する装置、システム、および方法
軌道を有する侵入する脅威に対抗して、迎撃ゾーンの中で該脅威を迎撃することによって、関連するプラットフォームを防御するように適合される迎撃デバイスが提供される。このような迎撃デバイスは、軸を規定するハウジングおよびハウジングと動作可能に係合されるカウンタメジャデバイスを備える。少なくとも1つの爆薬がハウジングによって収容され、カウンタメジャデバイスと動作可能に係合される。制御器デバイスが少なくとも1つの爆薬と通信し、制御器デバイスはハウジングによって収容され、少なくとも1つの爆薬に、ハウジングの軸に関して少なくとも部分的な半径方向外側に脅威の軌道に対応してカウンタメジャデバイスを展開させ、それによってカウンタメジャをして迎撃ゾーンの中で脅威に衝撃を与えるように構成される。また、関連する装置、システム、および方法が提供される。  (もっと読む)
(もっと読む)
目標特定評価装置
【課題】目標のRCSの距離、向きによる変化から、特定結果を判定し、電波データなどでは絞り込めなかった、複数の目標の特定結果を絞り込み、確度の高い特定結果を可能とする目標特定評価装置を得る。
【解決手段】任意のシナリオに基づき複数の疑似的な目標を発生する疑似目標発生部25と、電波探知装置等の覆域を算出する覆域評価部26と、探知した目標の電波目標データ等を作成する目標探知模擬部100と、距離−RCSデータ等と目標特定結果の対応関係を格納するデータベースを作成するデータベース作成部33と、電波目標データ等をデータベースと比較・照合することにより目標を特定する目標特定部39と、特定結果を更新する特定結果評価部40と、特定結果を表示する結果表示部42と、特定結果を統計的に処理する特定結果処理部38と、特定結果の処理結果に基づきデータベースを更新するデータベース更新部43を設けた。
(もっと読む)
レーダ装置
【課題】 レーダ装置の運用状態に応じて、データレーまたは目標の検出確率を向上させて最適化を図ることができるレーダ装置を提供することを目的とする。
【解決手段】 レーダ装置は、送信信号を空間に電波として放射し、空間からの電波を受信する空中線2と、送信信号を生成し、空中線2を送信する送信器1と、空中線2で受信した電波を増幅し、周波数変換して受信信号を生成する受信器3と、受信器3からの受信信号をパルス圧縮し、目標情報を抽出する目標検出器4と、目標情報に基づいて、ヒット数を制御するヒット数制御器5とを備えている。
(もっと読む)
レーダー装置及び送信ビーム制御方法
【課題】 レンジ方向に関する分解能やクラッタ抑圧性能を低下させることなく、遠距離目標及び近距離目標を効果的に監視することができるレーダー装置を提供する。
【解決手段】 レーダー波を送信し、空中線を介して移動目標による反射波を受信するレーダー装置であって、所定のパルス諸元に基づいて送信パルス信号を生成する送信パルス信号生成手段と、送信パルス信号に基づいて、送信パルス数が異なる2以上の送信ビームをレーダー波として形成する送信ビーム形成手段と、送信パルス数が異なる各送信ビームを順次に走査するビーム走査制御手段と、受信信号に基づいて送信ビームごとにビデオ信号を生成する受信手段とを備え、ビーム走査制御手段が、ビデオ信号のデータ更新周期を送信ビームごとに異ならせて各送信ビームの走査を行うように構成される。
(もっと読む)
341 - 360 / 389
[ Back to top ]