
Fターム[5J070AE04]の内容
レーダ方式及びその細部 (42,132) | 測定対象 (3,193) | 航空機 (399)
Fターム[5J070AE04]の下位に属するFターム
ヘリコプター (10)
Fターム[5J070AE04]に分類される特許
321 - 340 / 389
航空機情報表示システム
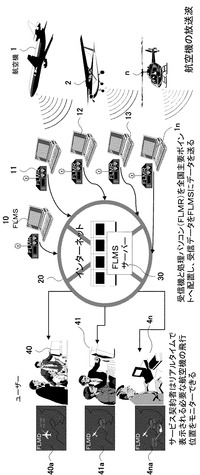
【課題】航空監視レーダー等の設置者以外の航空会社や航空機使用事業会社等の誰でも飛行中の航空機に関する情報を認識可能に表示する。
【解決手段】
受信システム手段は、航空機に搭載されたモードSトランスポンダからの放送波を受信し、受信電波のメッセージをデコードし、航空機に関する情報を抽出する。受信システム手段は、抽出された航空機に関する情報をインターネットを介してデータベースを構築するサーバー手段に送信する。サーバー手段は、各受信システム手段から送信されて来る航空機に関する情報を照合し、フィルタリング処理し、データベースを構築する。表示手段を所有するユーザは、予め情報提供の契約を行っているので、表示手段を用いてサーバー手段にアクセスし、契約に従った航空機に関する情報をサーバー手段から取り込み、表示画面上に随時表示する。
(もっと読む)
レーダ画像処理装置、レーダ画像識別方法およびレーダ画像識別プログラム

【課題】 レーダ画像においてアジマス方向に大きさが変化する移動体を識別する。
【解決手段】 レーダ画像表示部110は被識別情報データベース192からレーダ画像データを取得し入出力端末191に画像を表示する。構造物指定処理部120は表示した画像に基づいて利用者が入出力端末191から指定したレーダ画像上の構造物の位置を取得する。構造物画像位置算出部130は指定された構造物の位置情報に基づいてレーダ画像上の構造物間の距離の絶対値を算出する。構造物相対位置算出部140は構造物間の距離の絶対値に基づいてISAR画像上の構造物間の相対距離を算出する。地物識別部150は既知地物情報データベース193から既知である地物が有する構造物間の相対距離を取得してレーダ画像上の地物が有する構造物間の相対距離と比較してレーダ画像上の地物を識別する。
(もっと読む)
計器着陸システムの望ましくない信号を除去する方法及びシステム
【課題】 航空誘導システムにおいて望ましくない信号を除去する。
【解決手段】
航空誘導システムにおいて望ましくない信号を除去する方法は、振幅変調の第1の周波数を有する、少なくとも1つの第1の望ましい信号を受け取るステップと、振幅変調の第2の周波数を有する、少なくとも1つの第2の望ましい信号を受け取るステップと、前記第1と第2の望ましい信号の少なくとも1つと実質的に同じかあるいはその低調波である周波数を含む任意の周波数を有する少なくとも1つの望ましくない信号を受け取るステップを含む。前記振幅変調の第1と第2の周波数は位相が同期しており、前記望ましくない信号は前記第1と第2の望ましい信号の少なくとも1つと同期しない。この方法は、前記望ましくない信号を識別するステップと、当該望ましくない信号を除去するステップとも含む。
(もっと読む)
航空交通制御システムに用いられる情報処理装置
【課題】本来のシステムによる警報出力が不能な状態となったとしても、簡易方式によって警報監視を継続して警報出力することを可能にする。
【解決手段】情報処理装置14において、レーダ装置10からレーダ情報を取得するレーダ情報取得部21を設ける。制御部20は、レーダ情報取得部21により取得されたレーダ情報をもとに、航空機と同航空機に対して衝突の可能性がある対象物の位置を表示制御部35を通じて表示装置37において表示させる。衝突判定処理部24は、制御部20により表示される航空機と対象物の位置とが重なるか否かに基づいて航空機の対象物に対する衝突の可能性を判定する。制御部20は、衝突判定処理部24により衝突の可能性があると判定された場合に警報を出力する。
(もっと読む)
監視レーダ装置
【課題】応答信号に対する受信感度を向上させるために、簡易な構成により、減衰特性が大きく、群遅延特性のばらつきが小さい受信フィルタ特性を実現し得る監視レーダ装置を提供する。
【解決手段】各IF信号をバンドパスフィルタ53−1〜53−3に通す前に、各IF信号をA/D変換器51−1〜51−3にてアナログ信号からデジタル信号に変換し、I/Q検波器52−1〜52−3にて複素形式のデジタル信号(I信号、Q信号)に変換してバンドパスフィルタ53−1〜53−3に通すように構成している。
(もっと読む)
レーダ情報処理装置
【課題】複数の航空機に対する情報ラベルをレーダ画面中に表示する場合であっても、情報ラベル中の情報を常に確認しやすい状態にする。
【解決手段】レーダ情報処理装置14の制御部20は、入力装置33から入力される指示に応じて、情報ラベルにおける文字の文字サイズを設定する。ラベル表示制御部28は、設定された文字サイズに応じて、情報ラベルの表示画面中におけるサイズを設定し、この設定された複数の情報ラベルが表示画面中で重なるか否かを判定する。ラベル表示制御部28は、情報ラベルが重なると判定された場合に、情報ラベルの位置を所定の条件に従って重なりを回避することができるように変更して制御部20に通知する。制御部20は、変更された位置に情報ラベルをレーダ画面に表示させる。
(もっと読む)
飛翔体誘導システム
【課題】 飛翔体誘導システムが、飛来する敵機をキャッチしてこれを迎撃すべくミサイル等の飛翔体を発射させるとき、飛翔体が種別の異なる敵機に対しても容易かつ適切に対応できるようにする。
【解決手段】 捜索レーダ1が空間を捜索して目標Aを検出し、判定器2がその検出した目標Aの種別を判定する。
捜索レーダ1がキャッチした目標Aに向けて飛翔体6が発射され、飛翔体6が目標Aを検知して追尾するとき、予め判定器2によって判定された目標Aの種別に対応した目標検出プログラム(A1,A2,・・・An)が選択されて飛翔体6に送信供給される。
従って、飛翔体6は、異なる種別の目標Aに対応した操舵翼66a,66bに対する目標位置情報を、その送信供給された目標検出プログラムに基づき生成できるので、格別複雑な構成を採用することなく、異なる複数種別の目標Aに対応することができる。
(もっと読む)
航跡生成システム、その誤差共分散行列初期値設定装置、航跡生成方法およびその誤差共分散行列初期値設定方法
【課題】誤差共分散行列初期値として適切な値を算出し設定することによって、航跡を生成した直後における航跡諸元の精度および安定性を向上させる。
【解決手段】所定状態および誤差共分散行列の初期値を設定してその後の状態および誤差共分散行列を推定するカルマンフィルタを用いたシステムにおける前記誤差共分散行列の初期値を設定する誤差共分散行列初期値設定装置10において、前記誤差共分散行列初期値を、時間が経過するとともにある観測値が入力されるだろうと想定して状態の誤差を適切な値へ収束させる誤差共分散行列初期値収束手段14を有する。
(もっと読む)
二次監視レーダ装置及びエラー訂正方法
【課題】 モードS応答データのエラー訂正率を向上する二次監視レーダ装置及びエラー訂正方法を提供する。
【解決手段】 モードSトランスポンダからの応答信号の波形に基づいてモードS応答データのビットごとにエラーの可能性があるかどうかを信頼性判断部125で判断して信頼性データを生成し、この信頼性データに基づいて、エラー訂正処理部128でモードS応答データのエラーの可能性があるビットを1ビットずつ訂正し、すべてのエラーが解消するまで繰り返しエラー訂正処理を実行する。
(もっと読む)
衝突危険予測システム、および、プログラム
【課題】 航空機同士の衝突危険状態を適切に検出することのできる衝突危険予測システム等を提供する。
【解決手段】 レーダ装置1は、レーダスキャン等により、管制すべき各航空機の飛行位置、速度及び、方向を含む飛行情報を、それぞれ取得する。処理装置2は、レーダ装置1により取得された飛行情報に基づいて、各航空機の速度ベクトルを求め、速度ベクトル同士から定まる相対ベクトルを算定する。処理装置1は、予め定められた円柱形状からなる保護領域を、各航空機の飛行位置に対応する仮想空間にそれぞれ設定すると、この各保護領域に、算定した相対ベクトルに応じて半径等の長さが異なる扇形柱形状の領域を、各航空機の進行方向に対応させてそれぞれ付加し、各保護領域を拡張させる。そして、処理装置2は、拡張させた保護領域同士の重なりに基づいて、衝突危険状態を検出する。
(もっと読む)
二次監視レーダ及び二次監視レーダ応答信号解析方法
【課題】不要なモードA/Cターゲットレポートの除去性能が改善された二次監視レーダ及び二次監視レーダ応答信号解析方法を提供する。
【解決手段】質問信号を送信する送信部21と、質問信号に対する応答信号をトランスポンダ5から受信する受信部22と、これらに基づいてモードSターゲットレポートとモードA/Cターゲットレポートとを作成する信号処理部23と、モードSターゲットレポートからモードSトラックを生成し、モードA/CターゲットレポートからモードA/Cトラックを生成し、これらに基づいてモードSターゲットレポートとモードA/Cターゲットレポートとが同一航空機からのものであるか否かを判定し、モードSターゲットレポートとモードA/Cターゲットレポートとが同一航空機からのものである場合、モードA/Cターゲットレポートを棄却するコンバイナ26とを設ける。
(もっと読む)
分散ネットワーク・レーダ装置
【課題】 複数のレーダを使用して探知能力の拡大を図るレーダ装置において、車載移動型捜索レーダのように、設置場所が探索の都度に移動するために各レーダの周囲の地形環境が変化する場合であっても、電波干渉の影響を受けることなく、探知能力の拡大を図ることができる分散ネットワーク・レーダ装置を提供する。
【解決手段】 レーダ1とレーダ2を相互にネットワーク連接し、前記各レーダ間の送受信同期のために送受信同期部7−1で制御し、前記各レーダ毎に設置された送信部1−1及び2−1から互い相異なる周波数チャンネルの電波を目標3に向かってアンテナ1−3及び2−3を介して放射し、前記目標3で反射された全ての周波数チャンネルの電波を前記各アンテナ1−3及び2−3を介してそれぞれで受信し、各受信信号の電力振幅検出、ビデオ積分、測角演算、平均演算を行うようにした。
(もっと読む)
物体侵入センサおよびそれに使用するアンテナ装置
【課題】
簡単な構成で物体の侵入探知および方向探知を行う物体侵入センサおよびそれに使用するアンテナ装置を提供する。
【解決手段】
ダイポールアンテナである放射器11a、この放射器11aの両側に離れて平行配置された導波器11bおよび反射器11cを放射器11aの周りで回転且つ昇降可能にする昇降・回転機構18によりアンテナ装置11を構成し、この昇降・回転機構18の動作に応じて物体30の侵入探知モードおよび物体30の方向探知モードで動作する。
(もっと読む)
飛行場用気象レーダ装置とその風観測運用方法と風観測システム
【課題】飛行場用として、降雨・非降雨にかかわらず、風観測を可能にする。
【解決手段】空中線装置15によりレーダパルスを放射して降雨エコーを受信し、信号処理装置11にてその信号強度から降雨状況を観測して、降雨状況に応じて降雨時観測モードと非降雨時観測モードを選択的に切り替える。ここで、降雨時観測モードでは、エコー成分を観測し、この観測結果から風向・風速を算出するものとし、非降雨時観測モードでは、受信信号を積算してSNを向上させ、ブラック散乱によるエコー成分を観測し、この観測結果から風向・風速を算出する。
(もっと読む)
移動経路諸元推定方法
【課題】 任意の個数の複数の飛行の種類から成る一連の飛行について、切れ目のない連続した飛行経路を推定する手段を提供する。
【解決手段】
予め用意した移動体の観測時刻毎の観測値を元に、該移動体の位置、速度、加速度及び角速度の少なくともひとつを含む移動経路の諸元を推定する。また、移動体が一種類の運動により移動した区間の複数からなる移動経路の諸元を推定する。まず移動経路の諸元の要素と、区間毎の基本状態変数との対応関係、及び、移動経路の諸元の次数を、その区間の運動の種類に応じて区間毎に求める。次に観測値を元に予め求めた区間毎の基本状態遷移行列と、対応関係とに応じた区間毎の状態遷移行列を求める。次に全区間における次数及び状態遷移行列に応じた計画係数データ行列を求める。最後に計画係数データ行列、及び、観測値に基づく観測データ列に応じて、移動経路の諸元の推定値を求める。
(もっと読む)
レーダシステム
【課題】 クロスレンジ分解能を向上し、マルチパス環境下においても測角精度を確保することができ、妨害環境下においても探知/追尾性能を確保することができるレーダシステムを提供する。
【解決手段】 目標4の捜索範囲又は追尾範囲、所望のクロスレンジ分解能、レーダ装置1,2の距離分解能に応じて決定された離隔距離Lだけ互いに離隔してレーダ装置1,2を配置し、レーダ装置1から目標4までの距離Rt1が基準距離を超える場合には、レーダ装置1で測角して生成された方位情報に基づいて目標4の位置を特定し、基準距離以下の場合には、レーダ装置1,2で測定して生成された距離情報に基づいて目標4の位置を特定する。
(もっと読む)
二次監視レーダ応答信号解析装置及び二次監視レーダ応答信号解析方法
【課題】応答信号の受信異常の有無を通知することが可能な二次監視レーダ応答信号解析装置及び二次監視レーダ応答信号解析方法を提供する。
【解決手段】応答信号を解読し、これが正常な信号であるか否かを判定する信号解読部18と、応答信号の全ての内容及び判定の結果を時刻と共に表示する表示部23と、判定の結果を時刻と共に記録する記録部21とを設ける。
(もっと読む)
空港面監視システムおよびこれに用いる航跡統合装置
【課題】 複数の目標検出装置を併用して空港面を監視する場合において、各目標検出装置の位置検出精度に応じた正確な統合航跡の座標位置を決定する。
【解決手段】 複数の目標検出装置を併用して空港面を監視し、前記複数の目標検出装置により検出された同一目標物についての航跡情報から統合航跡を生成して表示部に表示する空港面監視システムにおいて、空港面のセンターライン情報を蓄積したセンターラインデータベースからセンターライン情報を読み出し、そのセンターライン情報を用いて複数の目標検出装置により検出された各航跡情報の座標位置から基準センターラインまでの垂直距離をそれぞれ算出し、それら垂直距離に基づく重み付け割合により前記同一目標物について統合航跡の座標位置を決定する。
(もっと読む)
会合時間算出装置、弾頭の起爆装置、及び飛翔体
【課題】 移動目標を追尾しつつ飛翔する飛翔体の、会合点までの到達時間(会合時間)の算出精度向上を図る。
【解決手段】 会合点hにおいて、離隔量(ミスディスタンス)Mを形成して飛翔体1が相手移動目標2が交差するとき、レーダ装置11により、時刻を異にして複数回得られる飛翔体1及び移動目標2の各位置情報から、飛翔体1を原点O(0,0,0)とした相対座標系において、現在座標位置P(x,y,z)に位置する移動目標2の速度Vt及び速度ベクトルVを得る。
離隔量Mを形成して会合するとき、移動目標2の会合座標位置H(x0,y0,z0)と原点Oとを結ぶベクトル(OH)と移動目標2の速度ベクトルVとが略直交することを条件として、会合座標位置H(x0,y0,z0)を求め、その会合座標位置Hと現在座標位置Pとの間の距離Dと、移動目標速度Vtとから、実会合時間Tに近い会合時間To を算出する。
(もっと読む)
二次監視レーダ応答信号受信装置及び二次監視レーダ応答信号受信方法
【課題】簡易的に航空機の位置を特定することが可能な二次監視レーダ応答信号受信装置及び二次監視レーダ応答信号受信方法を提供することを目的とする。
【解決手段】高度と応答信号が受信された際の仰角とから航空機との直線距離を算出し、直線距離と応答信号が受信された際の方位角とからX軸及びY軸における航空機との距離を算出する3次元位置演算部43を設ける。
(もっと読む)
321 - 340 / 389
[ Back to top ]