
Fターム[5J070AE04]の内容
レーダ方式及びその細部 (42,132) | 測定対象 (3,193) | 航空機 (399)
Fターム[5J070AE04]の下位に属するFターム
ヘリコプター (10)
Fターム[5J070AE04]に分類される特許
241 - 260 / 389
モードS二次監視レーダ

【課題】監視空域内に存在する航空機(トランスポンダ)を適確に把握し、航空機を安全に飛行させるモードS二次監視レーダを提供する。
【解決手段】質問に対する応答を受信するとともに、航空機から送信されるモードS拡張スキッタを受信する受信器123と、応答を受信すると、応答とモードS拡張スキッタとの相関値を求める相関処理手段135bと、相関値に基づいて、応答を送信した航空機をロールコール質問/応答による監視対象とするか否かを判定する有効判定手段135cと、航空機がロールコール質問/応答による監視対象とすると判定されると、航空機のモードSアドレスを含むレコードを登録機データに追加する更新手段135aとを備える。
(もっと読む)
精測進入レーダ装置

【課題】簡略された系統で探知性能を向上し得る精測進入レーダ装置を提供する。
【解決手段】送信信号発生部11の出力を分配器12により2つに分配して方位空中線装置13および高低空中線装置14にそれぞれ同時に供給し、方位空中線装置13および高低空中線装置14それぞれの送信部131,141にて分配器12により電力が半分に下がった送信信号をレーダ波に電力増幅して同時に空間に送出するようにしている。
(もっと読む)
レーダ情報処理装置
【課題】個別レーダは極力小型軽量の装置規模を維持しながら、目標の航跡位置情報の信頼性向上を可能にする。
【解決手段】各レーダと目標との相対距離に応じてS/Nウェイト係数を算出するS/Nウェイト計算部と、各レーダと目標との相対位置に応じて位置ウェイト係数を計算する位置ウェイト計算部と、当該装置の自己位置を標定する自己位置標定部と、スキャンごとに各レーダから受信した目標の位置情報のそれぞれに対して、算出されたS/Nウェイト係数および位置ウェイト係数を乗じ、ウェイト付けされた位置情報を合成し、合成された位置情報を当該装置の自己位置に基づいて絶対的な目標位置に変換する位置計算部を備え、位置計算部で算出された前後のスキャン時の絶対的な目標位置に基づいて追尾処理を行う。
(もっと読む)
パルス信号処理装置、パルス位置検出方法及びDME受信装置
【課題】ダイナミックレンジの広いパルス入力に対し、簡単な構成回路を用いて高い精度でパルス位置を検出する。
【解決手段】IF帯受信パルス信号aは、分配器14で2系統に分配され、一方は増幅器15で増幅されてリニアビデオ検波器16でリニアビデオ検波され、他方は対数ビデオ検波器17で対数ビデオ検波される。それぞれの検波出力b,dは半振幅検出回路18,19に送られ、半振幅となるタイミングが検出される。レベル検出回路21では、対数ビデオパルス信号dの振幅レベルを検出し、そのレベル検出結果が規定値以上か否かを示すレベル検出信号fを発生する。パルス信号dが規定値より低い場合、レベル検出信号fにより、切換回路20はリニアビデオ検波側のタイミング検出信号cを選択出力する。これに対し、パルス信号dが規定値より高い場合、レベル検出信号fにより、切換回路20は対数ビデオ検波側のタイミング検出信号eを選択出力する。
(もっと読む)
ADS−B地上局
【課題】装置規模の増大を抑えつつ、取得したADS−B監視情報の信頼性を向上させたADS−B地上局を得る。
【解決手段】受信したADS−B信号に基づきトラック情報を新たに作成した航空機に対して、このトラック情報の作成直後にDBCを要求するモードS個別質問を行ない、その応答信号を受信解読後、この新たに作成したトラック情報内とモードS個別応答内のそれぞれのDBC、及び距離情報が合致するか否かを判定する。そして、これらが合致した場合には、ADS−B信号を発した航空機とモードS個別質問に応答した航空機とが同一の航空機であるとしてこれを実ターゲットとして扱い、この新たに作成したトラック情報を継続して保持する。一方、これらが合致しない場合には誤ターゲットとし、この新たに作成したトラック情報を棄却して誤ターゲットの混在を減らす。
(もっと読む)
モード「S」での応答の処理中にマルチパス伝搬の影響を軽減するための方法
本発明に係る処理方法は、監視レーダーによって質問された目標物からの応答を、監視レーダーの受信ローブ内に存在する全ての目標物に対するモードS質問に従って処理する方法であって、
監視レーダーの受信ローブ内に存在する種々の目標物が少なくとも1回質問され、それぞれの質問後に当該ローブについて受信された一連のモードS応答信号が収集され、応答検出処理操作が目標物ごとに実行され、誤りが検出され、必要に応じて誤りが訂正され、対応するブリップが抽出される方法において、
信号の品質の検出及び判定処理操作が、各目標物に対する各質問への一連の応答を使用して合成メッセージを形成することと、メッセージのビットごとに、当該ビットの値と品質を確定することと、この合成メッセージを使用して誤りの検出と訂正を実行することとを含むと共に、同じ対象物からの全ての失敗応答の3つの変数Σ、Δ、及びモノパルスを利用して合成メッセージを構築することを特徴とする。
この処理操作は、既存の方法が適していない極めて汚染度の高い電磁環境(応答失敗以外の理由で同じ目標物に質問が再度送信される場合がある)で有用である。
(もっと読む)
レーダ装置
【課題】レーダ装置の覆域を拡充すると装置規模が拡大する問題が発生していた。
【解決手段】空中線から送信信号を放射し目標からの反射波を受信処理して目標検出を行うレーダ装置において、目標検出器8で目標が検出されるまでは、仰角ビーム制御器5と方位ビーム制御器6とレンジビン制御器9を広仰角ビーム、広方位ビーム、粗いレンジビンに制御することで誤警報確率を緩和し、最小探知S/Nを緩和させることによって、尖頭送信電力を抑えレーダ装置規模を縮小する。目標検出器8が目標を検出した際は、仰角ビーム制御器5と方位ビーム制御器6とレンジビン制御器9を狭仰角ビーム、狭方位ビーム、細かいレンジビンに制御して、再度目標検出することにより、分解能を向上して目標に対し精確に位置を特定する
(もっと読む)
航空管制用レーダシステム
【課題】離陸直後に出発機が急旋回する等の航路を取った場合にも機影を見失うことなく確認することができ、また滑走路周辺の離発着機情報を捉えることができる航空管制用レーダシステムを提供する。
【解決手段】航空管制用レーダシステムは、空港監視レーダ(ASR)と、二次監視レーダ(SSR)と、精測進入レーダ(PAR)と、所定の出発機についてSSRおよびASRによってそれぞれ得られる出発機情報とこの出発機についてPARによって得られる出発機情報とに基づいて出発機の追尾を行う。また、ASRで得ることができない滑走路周辺の離発着機情報をPARで補間し追尾を行う構成とすることができる。
(もっと読む)
航空管制システム
【課題】プラットホーム上に追尾レーダのみ搭載するような制限のある場合においても、追尾レーダのみで航空管制用のPPI表示を行える航空管制用表示方式を実現する。
【解決手段】空間走査方式がランダムである追尾レーダ10と、この追尾レーダが探知した対象目標の測位時刻及び位置情報をもとに、PPI表示装置の表示更新周期に合わせた前記対象目標の予測位置を算出する時刻整合処理手段20とを備え、前記対象目標の相対位置を前記PPI表示装置40に表示する。
(もっと読む)
パッシブコヒーレント探索アプリケーションのための、広帯域事前検出信号を処理するシステムおよび方法
【課題】PCLアプリケーションのための、広帯域事前検出信号を処理するシステムおよび方法が開示される。
【解決手段】入力信号を受信、上記入力信号のチャネル歪みを補償後復調し、複素数値表現を形成、上記復調した入力信号から基準信号および目標物信号を推定し、上記基準信号の一部を減らすことであって、上記基準信号は、適応的にフィルタリングされ、出力目標物信号が形成され、上記基準信号の一部を減らすこと、上記出力目標物信号、基準信号に対して逆変換オペレーションを実施、上記出力目標物信号について、複数の目標物ビームを形成、ビームのそれぞれについて、間引きした複数のラグ積を形成、上記基準信号について、間引きした複数のラグ積を形成、ビームのそれぞれについてクロスアンビギュイティ関数を推定、上記基準信号についての上記間引きした複数のラグ積を用いて、上記基準信号についてオートアンビギュイティ関数を推定することを含む。
(もっと読む)
パッシブコヒーレント探索アプリケーションのための、狭帯域事前検出信号を処理するシステムおよび方法
【課題】パッシブコヒーレント探索アプリケーション(PCL)において、狭帯域事前検出信号を処理するシステムおよび方法を提供する。
【解決手段】受信サブシステムは、基準信号およびターゲット信号を統制されていない送信機から受け取る。PCLシステムは、ゼロ−ドップラー消去、直交復調、基準ビーム再生、コヒーレント処理区間選択、パワースペクトル密度推定、クロスアンビギュイティ関数形成などを含み、基準信号はターゲット信号に関してフィルタリングされて、第1出力基準信号が形成される。第1出力基準信号は第1ターゲット信号と結合されて、第1出力ターゲット信号が形成される。次に、出力ターゲット信号は、後続のPCL探索処理オペレーションに用いられる。フィルタは、ターゲット信号と後続のターゲット信号の差に関して更新される。さらに、基準信号およびターゲット信号の相関処理のために2つの経路が用いられる。
(もっと読む)
精測進入レーダ装置
【課題】空中線の切替方式を簡略された系統にて実現可能な精測進入レーダ装置を提供する。
【解決手段】制御部16において、ビーム走査繰り返しごとに、方位空中線装置13の送信部131及び高低空中線装置14の送信部141それぞれの増幅動作を交互にオン/オフし、信号処理部15の信号処理器153に対しA/D変換器151,152それぞれの出力のうちいずれか1つを選択させるようにして、方位空中線装置13及び高低空中線装置14を交互に切り替えるようにしている。
(もっと読む)
航空機の高度監視警報装置
【課題】有視界飛行を行う小型機(VFR機)に対し、高度監視警報を行う。
【解決手段】レーダ機器1で捕捉した航空機Aの現在位置における高度位置から、下方へ向けて設定したバイアス距離Bが、予め設定された最低安全高度に抵触すると判定器6が判定したとき、管制官は、通信機器7を介して、航空機Aに向けて警報を発するように構成したので、簡単な構成により、小型機に対する高度監視警報を適切かつ容易に行うことができる。
(もっと読む)
精測進入レーダ装置
【課題】管制対象とする航空機を自動追尾できるようにし、これにより管制官の負担を軽減可能な精測進入レーダ装置を提供すること。
【解決手段】飛行場監視レーダおよびレーダ情報処理システムから飛行場周辺の航空機の便名や位置情報などを取り込み、表示装置16にA/N表示する。表示された航空機のうち管制対象機をマウス19により選択指定すると、信号処理部15により生成される空中線制御信号をサーボ制御部18に与え、方位空中線13および高低空中線14のビーム指向方向が管制対象機を追尾するように自動制御するようにしている。このようにしたので、管制官はジョイスティック17等による空中線のビーム制御を行うことなく、管制対象となる航空機を簡単な操作により一度選択するだけでこれを自動追尾できる。従って管制官の負担を軽減でき、管制官は本来の管制業務に専念できるようになる。
(もっと読む)
センサ制御装置
【課題】3次元センサのビーム指向方向やビーム指向範囲を適正に制御して、3次元センサの3次元角度の測位精度を高めることができるセンサ制御装置を得ることを目的とする。
【解決手段】軌道テンプレートと目標の発射諸元パラメータを用いて目標の2次元角度を予測し、その2次元角度の予測値と2次元センサ1により測位された2次元角度の観測値との差異が許容範囲内にあるか否かを判定し、その判定結果が許容範囲内である旨を示す場合、その発射諸元パラメータを用いて目標の3次元位置を予測するようにしたものである。
(もっと読む)
レーダセンサ前端用の時間二重化の装置及び方法
【解決手段】レーダシステム(25)及び対象物検出方法は、高い送信負荷時間率を維持しながら、対象物のレンジ及び任意である方位を決定する。波形発生器(30)は、送受信スイッチ(32,34)によりアンテナ開口に接続される。波形は、送信周期及び受信周期の合計の時間期間の半分より長い時間、送信される。周波数変調連続波(FMCW)波形に対して、受信器は、対象物から受信信号の少なくともナイキスト速度である速度で短い間隔でオンにすることができる。モノパルス又は周波数走査型アンテナを、レンジと同様に方位を決定するために使用することができる。  (もっと読む)
(もっと読む)
レーダ装置
【課題】電力の微弱な目標の探知性能を向上できるレーダ装置を得る。
【解決手段】目標からの反射パルスを受信してA/D変換する受信手段1と、パルスヒット毎の受信、送信信号の相関をとるパルス圧縮手段2と、目標からの直接波とリピータを介した目標からの間接波とが存在するレンジビンを推定し、間接波が存在するレンジビンから直接波が存在するレンジビンへの積分路を決定する積分路探索手段3と、前記積分路に従って、レンジ方向にノンコヒーレント積分を実施するレンジ方向ノンコヒーレント積分手段4と、パルスヒット毎に得たレンジ方向ノンコヒーレント積分手段4の出力をヒット方向にノンコヒーレント積分を実施するヒット方向ノンコヒーレント積分手段5と、ヒット方向ノンコヒーレント積分手段5の積分結果を閾値処理し、閾値を越えたレンジビンに対して目標の検出とみなす閾値手段6とを設けた。
(もっと読む)
目標類別装置
【課題】特徴量の信頼性の動的な変動を考慮することで、より高精度な区間値ファジィ推論方式による目標類別を可能とする目標類別装置を得る。
【解決手段】目標観測手段101により類別対象の目標が有する特徴量を得て、特徴量と特徴の度合いを表す入力ファジィ区間値とを関連付けたメンバシップ関数106と、メンバシップ関数106の区間の幅として定義できる特徴の曖昧さを特徴量から信頼性算出処理部108により算出された信頼性係数とを用いて、区間値ファジィ化処理部102により目標観測手段101によって得られた特徴量のファジィ化を行い、入力ファジィ区間値を得て、これから推論処理部103により目標種類の確からしさを表す出力ファジィ区間値を算出し、非ファジィ化処理部104によって算出された出力ファジィ区間値から目標種類を確定し、表示装置105に表示する。
(もっと読む)
レーダ装置
【課題】受信信号の減衰処理を比較的容易な回路構成で実現可能であり、また調整も容易なレーダ装置を提供する。
【解決手段】受信信号の減衰処理をSTC回路141のみに頼らずに信号処理装置15のレベル減衰部152で分担して実行するようにし、またSTC回路141において探知距離に亘って減衰量を徐々に減少させる必要がなく、STC制御信号(1)の各分割時間範囲ごとにその固定値に基づいて受信信号を減衰するようにしている。また、レベル減衰部152において設定する減衰量を時間変化に対し一定の傾きをもった変化で制御するようにしている。
(もっと読む)
レーダ追跡装置及びその方法
追跡の測定値を極座標系から直交座標系に変換することによって発生するレーダ測定値の測定誤差共分散の変化を基に、α−β追跡フィルタのα及びβフィルタ利得を求めるための追跡指数を計算する追跡指数部、及び追跡指数変化率に対するα及びβフィルタ利得の変化率の偏微分係数と追跡指数変化量とを基に、α及びβフィルタ利得の変化量を計算し、α及びβフィルタ利得を更新するフィルタ利得更新部を具備するα−β追跡フィルタを有するレーダ追跡装置である。 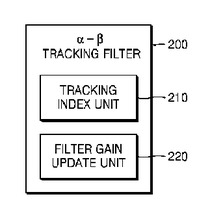 (もっと読む)
(もっと読む)
241 - 260 / 389
[ Back to top ]