
Fターム[5J070AE04]の内容
レーダ方式及びその細部 (42,132) | 測定対象 (3,193) | 航空機 (399)
Fターム[5J070AE04]の下位に属するFターム
ヘリコプター (10)
Fターム[5J070AE04]に分類される特許
121 - 140 / 389
避退指示装置
【課題】 従来、航空機等の移動体に対して、目標物や目標物に向けて発射される飛しょう体からの避退を指示する場合、オペレータの判断により手動で避退指示を与えていたため、指示タイミングが遅れる、また最適な避退針路でない恐れがあった。
【解決手段】 飛しょう体情報記憶部より読み込む飛しょう体の発射位置及び発射速度と目標情報記憶部より読み込む目標の位置と速度と針路とに基づき飛しょう体を目標に会合させる針路を算出する飛しょう体針路算出部と、目標の針路及び求めた飛しょう体の針路と移動体情報記憶部より読み込む移動体の位置とに基づき避退する移動体を判定する避退対象判定部と、避退対象の移動体の位置及び速度と飛しょう体の針路及び目標の針路とに基づき移動体の避退針路を算出する避退針路算出部と、避退針路算出部より出力される避退針路を移動体に指示する避退指示部と、を備える避退指示装置である。
(もっと読む)
ILS装置のモニタ方法及びモニタ装置

【課題】実際の航空機が受信しているILS信号とより近い信号のモニタ出力を得ることができると共に、保守性を向上する。
【解決手段】BPF14aは、ミキサ13aから出力された中間周波数10.7MHzに周波数変換されたILS信号(NF POSN)の、10.7MHzを中心とする6kHz〜8kHz程度の周波数成分を周波数選択し、モニタ回路16aでモニタさせる。BPF14bは、中間周波数に周波数変換されたILS信号(INTG WD)の、10.7MHzを中心周波数とする6kHz〜8kHz程度の周波数成分を周波数選択し、モニタ回路16cでモニタさせる。BPF15a、15bは、ミキサ13b、13dで周波数変換されたILS信号(INTG POSN、INTG CL)の、10.7MHzを中心周波数とする18kHz以上の周波数成分を、モニタ回路16b、16dでモニタさせる。
(もっと読む)
緊急応答システム
【課題】質問側からの呼び掛けに応答側から応答が得られなかったとき、その理由が質問側で判明できるようにした緊急応答システムを提供すること。
【解決手段】質問機システム8から質問信号を送信し、航空機に搭載された応答機1から質問信号に対する応答信号を質問機システム8に送信するシステムにおいて、質問側の無線機9とは別の第1の無線機9と、応答機1に備えられている無線部2とは別に航空機に備えられた第2の無線機7を備え、応答機1に故障が発生したとき、第2の無線機7と第1の無線機9を介して通信を行い、応答機1に故障が発生したことが質問機システム8に通知され、レーダ卓の表示部10に表示されるようにしたもの。
(もっと読む)
レーダ信号処理装置およびレーダ信号処理方法
【課題】最小限のリソースで速度の分離精度を高めることの可能なレーダ信号処理装置を提供すること。
【解決手段】受信信号に対してドプラフィルタ処理部2により粗くドプラフィルタ処理を施し、各フィルタバンクにおける信号強度を用いた重心計算により、強度分布のピーク位置を得る。そしてこのピーク位置から特定したフィルタバンクにつき最小限の周波数レンジで再度、高精細のドプラフィルタ処理を施す。
(もっと読む)
レーダ装置
【課題】各探知距離領域において探知できない方位角範囲が広くならないようにできるレーダ装置を簡易且つ低廉な構成にて実現する。
【解決手段】送信部12は、同一種類の単パルス信号同士が一定の繰り返し周期となるように、複数種類の単パルス信号を特定の順で切り替えながら送信する。受信部15は、受信データ記憶部51とパルス積分部52とを備える。受信データ記憶部51は、種類毎のパルス応答データを時間的配列が認識できるように所定回数分記憶する。この際、新たなパルス応答データが入力されると、当該新たな応答データを含む新しい側の所定回数分のパルス応答データを保持するように更新記憶する。パルス積分部52は、同一種類のパルス応答データを新しいデータ側の特定個数分だけ読み出してパルス積分する。
(もっと読む)
センサ装置
【課題】人などの物体の有無をドップラセンサを用いて判定するセンサ装置の判定精度を向上することが可能な技術を提供する。
【解決手段】センサ装置100は、ドップラセンサ1と、A/D変換器2と、離散フーリエ変換部3と、算出部4と、判定部5とを備えている。A/D変換器2は、ドップラセンサ1から出力されるドップラ信号S1をディジタル信号に変換して出力する。離散フーリエ変換部3は、A/D変換器2の出力信号S2に対して離散フーリエ変換を行って、当該出力信号S2を周波数領域の信号に変換して出力する。算出部4は、離散フーリエ変換部3の出力信号S3から所定の複数の周波数成分を抽出し、当該複数の周波数成分の電力の総和を算出する。判定部5は、算出部4で算出された複数の周波数成分の電力の総和に基づいて、検出対象物の有無を判定する。
(もっと読む)
後方乱気流検出装置
【課題】仰角が高い場合も後方乱気流を検出できる後方乱気流検出装置を得る。
【解決手段】航空機の飛行方向に直交する方向に大気中へ光パルスを発射し、その大気からの反射光を一空間断面の信号として受信する電磁波送受信部1と、受信信号から空間断面のドップラ風速分布を算出し、ドップラ風速分布から空間断面の後方乱気流の位置を算出する信号処理部2と、空間断面の後方乱気流の位置を表示する表示部3とを備え、信号処理部2は、受信信号に基づき、処理単位毎に風速値を算出して空間断面のドップラ風速分布を算出するドップラ風速分布算出部21と、算出されたドップラ風速分布と、パラメータにより算出されたドップラ風速分布モデルとの相互相関処理から、後方乱気流を検出する検出処理部22と、相互相関処理の相関値が所定の値である空間断面の所定の位置から、空間断面の後方乱気流の位置を算出する乱気流位置算出部23とを有する。
(もっと読む)
レーダー画像を使用して航空機の位置を求めるシステム及び方法
【課題】GPS信号を使用して正確に位置を求めることができない状況、又はGPS信号が利用可能でない状況において、航空機の位置を求める代替的なシステム及び方法を提供する。
【解決手段】航空機の位置を求めるように動作可能な測位システム及び測位方法。例示的な一実施の形態は、搭載メモリ116内に格納される事前捕捉画像202内の、既知の位置によって規定される少なくとも1つの物体を特定し、現在のレーダー画像302内の少なくとも1つの地上物体を特定し、現在のレーダー画像302内で特定された地上物体を、事前捕捉画像202内で特定された物体と相関付け、設置車両と事前捕捉画像202内の特定された物体との間の相対位置を求め、且つ事前捕捉画像202内の特定された物体の既知の位置と、求められた相対位置とに基づいて設置車両の位置を求める。
(もっと読む)
ネットワークレーダシステム
【課題】 より信頼性の高い、目標追尾が行えるネットワークレーダシステムを得ること。
【解決手段】 目標の追尾に割り当てられているレーダと別の切替先レーダとの覆域が離れている場合、レーダ制御部を介して切替先レーダの探知テスト部を制御し、ビーム照射テストを実行させ、ビーム照射テストの結果、S/N比が所定の閾値以上のときは、レーダ制御部に目標を追尾するレーダを切替先レーダに切り替えさせ、ビーム照射テストの結果、S/N比が所定の閾値未満のときは、切替先レーダを除く複数のレーダの覆域や目標の探知状況から算出した目標の予測軌道から目標の追尾を実行させる新たな切替先レーダを割り当てるため、追尾レーダ割当計画を追尾レーダ割当計画算出部に再算出させ、レーダ制御部に目標を追尾するレーダを新たな切替先レーダに切り替えさせる追尾レーダ割当評価部を備える。
(もっと読む)
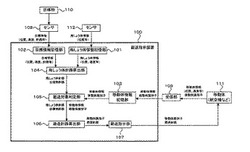
パルス検出装置及びパルス検出方法
【課題】最小受信感度を向上させてパルスがノイズの影響を受けた場合でもパルスを容易に検出する。
【解決手段】受信信号を所定の第1周波数の帯域で制限して得られた信号の振幅レベルを積分し、第1積分信号を求める第1積分器113と、受信信号を第1周波数よりも低い所定の第2周波数の帯域で制限して得られた信号の振幅レベルを積分し、第2積分信号を求める第2積分器114と、第1積分信号と第2積分信号とを比較する比較部115と、比較部の比較結果に応じて受信信号から所定周波数のパルスを検出するパルス検出部116とを備える。
(もっと読む)
二次監視レーダ装置及び二次監視レーダ装置によるモノパルス測角方法
【課題】構成を簡略化することができる二次監視レーダ装置を提供する。
【解決手段】二次監視レーダ装置1は、受信した信号から生成されるΣ信号SΣを振幅情報Σa及び位相情報Σpを含むLog増幅信号SΣLogに増幅するLog増幅器41と、Log増幅信号SΣLogをデジタル信号SΣdにデジタル変換するA/D変換器42とを有するΣ信号処理部32と、受信した信号から生成されるΔ信号SΔを振幅情報Δa及び位相情報Δpを含むLog増幅信号SΔLogに増幅するLog増幅器51と、Log増幅信号SΔLogをデジタル信号SΔdにデジタル変換するA/D変換器52とを有するΔ信号処理部33と、振幅情報Σa、位相情報Σp、振幅情報Δa及び位相情報Δpから航空機91の方位角度θを演算するモノパルス演算部37とを備えている。
(もっと読む)
航空管制レーダ及びスキッタの識別方法
【課題】航空機から受信するショートスキッタとロングスキッタを識別し、航空機の捕捉に有効に利用する。
【解決手段】受信信号が、質問信号に対する応答信号であるか否かを判定する応答判定手段132aと、応答判定手段によって受信信号が応答信号でないと判定された場合、当該受信信号がスキッタとして定められる規定のフォーマットに適合するか否かの信頼性を判定し、当該信頼性の判定を利用してショートスキッタ又はロングスキッタのいずれであるかを識別するDF部にエラーがあるか否かを判定するDF部信頼性判定手段132cと、DF部信頼性判定手段によって受信信号が規定のフォーマットに適合するが、DF部にエラーがあると判定された場合、当該受信信号のデータ長に応じてショートスキッタ及びロングスキッタを抽出する抽出手段132eとを備える。
(もっと読む)
レーダ追尾装置、レーダ追尾方法及びプログラム
【課題】探知能力を向上させることが可能なレーダ管制装置、レーダ追尾方法及びプログラムを提供する。
【解決手段】PARを用いたレーダ管制装置において、外部システム1から入力した航空機の飛行情報に基づいて、時刻毎の着陸誘導機数を算出し、前記着陸誘導機数に応じてPAR3の時刻毎の追尾ビーム数を制御する制御手段2を備える。
(もっと読む)
状況表示装置
【課題】多数の目標の状況を正確かつ迅速に把握することを可能とする。
【解決手段】第1の座標変換手段により、観測したセンサ中心空間の座標を地球中心空間の座標に変換し地球中心座標記憶手段に記憶し、目標の位置を管理する目標リストを用いて、航跡管理手段により、異なるセンサにより得られた複数の観測値および異なる時刻に得られた複数の観測値を地球中心空間の座標と比較して同一の目標に対応するかを判定し、判定結果に基づき目標の位置情報を更新し、第2の座標変換手段により、記憶された地球中心空間の座標をスクリーン座標に変換してスクリーン座標記憶手段に記憶し、画像生成手段により、目標のリストに基づいてスクリーン座標記憶手段から所定の目標座標情報を読み出し、当該読み出した座標の位置に目標を表すシンボルの画像を生成する。
(もっと読む)
飛しょう体の誘導装置
【課題】飛しょう体ロール時の空間安定性の劣化を改善したAZEL切替測角方式の飛しょう体の誘導装置を提供する。
【解決手段】1回目の第1の方向の誤差角の検出と2回目の第1の方向の誤差角の検出の間に、1回目の第2の方向の誤差角の検出と2回目の第2の方向の誤差角の検出を行い、1回目に検出した第1の方向の誤差角と2回目に検出した第1の方向の誤差角との相加平均を基準時間Tにおける第1の方向の誤差角とし、1回目に検出した第2の方向の誤差角と2回目に検出した第2の方向の誤差角との相加平均を基準時間Tにおける第2の方向の誤差角とする。
(もっと読む)
二次監視レーダ
【課題】プリアンブルが含む情報をより利用することができる二次監視レーダを提供する。
【解決手段】二次監視レーダ1は、第1パルスP1〜第4パルスP4を有するプリアンブルPAを含むモードS用の応答Rを受信する。二次監視レーダ1は、プリアンブルPAのパルスP1〜P4の立上りを検出して立上り検出信号Srを出力する立上り検出部42と、プリアンブルPAのパルスP1〜P4の立下りを検出して立下り検出信号Sdを出力する立下り検出部43と、立上り検出信号Srと立下り検出信号Sdとの間に一定間隔で入力されるクロックパルスCLKをカウントしてパルス幅WC1〜WC4を測定するカウンタ部41とを含むプリアンブルパルス幅カウンタ処理部34を備えている。
(もっと読む)
レーダ装置及び信号のlog変換方法
【課題】受信した信号のダイナミックレンジの拡大を簡単な構成で行なうことができるレーダ装置を提供する。
【解決手段】受信信号の振幅値を表すlog波形を検出するlog検波器132aと、受信信号の周波数および位相を表わす位相波形を検出する位相検波器132bと、log検波器132aで検出されたlog波形で表される振幅値に応じて、位相検波器132bで検出された位相波形の振幅を調整するゲイン調整器132dとを備える。
(もっと読む)
物体検出システム、該物体検出システムに用いられる物体検出方法及び物体検出制御プログラム
【課題】レーダから放射される電波に対する反射率が著しく小さいステルス性を有する飛行物体などを検出する物体検出システムを提供する。
【解決手段】レーダ(たとえば、合成開口レーダ11)により、高空から地表方向に所定時間毎に電波が放射されると共に、地表の電波反射率が走査されて観測され、同一場所の電波反射率が複数回(たとえば、2回)ずつ逐次観測される。そして、物体検出手段(たとえば、電子計算機12)で、この観測された同一場所の電波反射率が比較され、各電波反射率に変化がある場合、物体(たとえば、飛行物体P1,P2)が空中に存在することが検出される。
(もっと読む)
レーダ装置
【課題】障害発生時の運用中断の期間を短縮して可用性を向上させたレーダ装置を得る。
【解決手段】分割した覆域毎に対応させて設けられた複数の空中線を有するレーダ装置において、同一に構成された複数個の単位空中線を有する主空中線部と、この主空中線部から離間して設置された回動可能な1個の単位空中線を有する副空中線部とを用いて、レーダ波を送受信する空中線部を構成する。そして、主空中線部内の単位空中線の動作を監視し、動作異常が検出された場合には、副空中線部を、この動作異常となった単位空中線の代替として、直前までの動作状況を引き継ぎつつ、その動作を継続させるように制御する。
(もっと読む)
広帯域レーダ装置
【課題】レーダ装置に関し、特に、超広帯域の電波を送受信して移動物体等の目標の位置を高精度で検出する広帯域レーダ装置に関し、複数の受信波を合成して目標物体の距離や方位等を検出するレーダ装置において、送信及び受信アンテナ間の距離が小さく、目標物体が広帯域レーダ装置から距離が離れた場合でも、目標物体の方位精度を高めた小型かつ超広帯域レーダ装置を得る。
【解決手段】2つの受信アンテナ部で受信した2つの受信パルス信号が、サンプリング積分検波されて2つのデジタル信号に変換された後、移動物体を検出した2つの応答差分信号が得られる。2つの信号から、任意の距離離れた第1の仮想受信アンテナ部及び第2の仮想受信アンテナ部で受信する擬似応答差分信号が算出される。この信号を用いて移動目標の距離と方位を検出することで、目標物体の距離がある程度離れても、方位精度を高めることができる。
(もっと読む)
121 - 140 / 389
[ Back to top ]