
Fターム[5J070AE04]の内容
レーダ方式及びその細部 (42,132) | 測定対象 (3,193) | 航空機 (399)
Fターム[5J070AE04]の下位に属するFターム
ヘリコプター (10)
Fターム[5J070AE04]に分類される特許
81 - 100 / 389
目標追尾装置及びコンピュータプログラム及び目標追尾方法
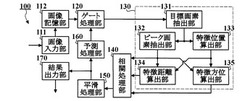
【課題】比較的狭い範囲内に複数のピーク画素がある場合でも、少ない計算量で精度の高い相関処理をする。
【解決手段】ピーク画素抽出部132は、目標画素のなかから、隣接する画素よりも画素値が大きい画素(ピーク画素)を抽出する。特徴位置算出部133は、目標の特徴を表わす特徴点の位置(特徴位置)を算出する。特徴距離算出部134は、ピーク画素の位置と特徴位置との間の距離(特徴距離)を算出する。特徴方位算出部135は、ピーク画素の位置から見た上記特徴位置の方位(特徴方位)を算出する。相関処理部140は、特徴距離と特徴方位とを含む相関パラメータに基づいて、相関処理をする。
(もっと読む)
レーダ情報表示装置

【課題】投影方法を切り替えてもレーダ情報や地図情報が表示されるまでの遅延を少なくすることができるようにする。
【解決手段】レーダ情報記憶バッファ210および地図情報記憶バッファ220は、それぞれが2つの記憶バッファ211(221),212(222)と、当該記憶バッファの一方を記憶情報の読み出し状態にした場合に他方を更新情報の書き込み状態となるように切り替えるバッファ切り替え手段213(223)とを有しており、座標変換手段240と画像生成手段230による表示画像生成処理は、所定の周期で、かつ当該周期内の一定の期間に割り当てて繰り返して行い、レーダ情報記憶バッファ210および地図情報記憶バッファ220の更新情報の書き込み処理は、所定の周期内の残りの期間に割り当てて任意の時期に行う。
(もっと読む)
レーダ装置
【課題】JEMが発生した場合の目標相対速度を正しく算出し目標検出性能の向上を図ったレーダ装置を得る。
【解決手段】周波数が異なるキャリア信号を所定時間間隔でパルス変調した送信信号を放射する手段、目標で反射した信号を受ける受信手段、受信された時間領域の受信信号を周波数領域に変換する周波数領域変換手段206、周波数領域の受信信号における信号強度に基づき目標候補を検出し、目標候補の相対速度を求める目標候補検出手段207、目標候補検出手段で異なるキャリア周波数で検出された目標候補の位相差を求め位相差から目標候補の仮の相対距離を求める仮の相対距離算出手段208、目標候補の仮の相対距離に基づき目標候補を判定する目標判定手段209、目標と判定された目標候補の相対速度を目標候補検出手段で求めた目標の相対速度で求める目標相対速度算出手段210を有す。
(もっと読む)
高高度長時間滞空無人機とその動作方法
実施形態は、測量および/または信号収集目的の1つまたは複数の電磁気(IR/視覚/RF)センサ素子またはスイート(112、337)を有する1つまたは複数の静止位置保持可能な高高度長時間滞空(HALE)無人機(110)を含む。実施形態は、方向可変レーザー(331)を有する1つまたは複数の静止位置保持可能な高高度長時間滞空(HALE)無人機(110)を含む。実施形態はGPS中継器として構成された4つ以上の高高度長時間滞空(HALE)無人機(611〜614)のグループを含む。 (もっと読む)
二次監視レーダ
【課題】航空機の監視とともに、空港付近を飛行する航空機の危険を防止する。
【解決手段】危険進路を飛行する航空機の有無を判定する判定部(134i)と、判定部によって危険進路を飛行する航空機が存在すると判定されたとき、航空機に搭載される航空機衝突防止装置に衝突の回避を促がす回避指示信号を送信するタイミングを設定する設定部(135)と、設定部で設定された回避指示信号の送信タイミングで、回避指示信号の送信用として規定される質問信号の受信周波数を送信機に出力する周波数切替部(137)と、送信タイミングで、周波数切替部から出力された質問信号の受信周波数の回避指示信号を送信させるように送信機を制御する送信制御部(131)とを備える。
(もっと読む)
レーダ情報処理システム及びレーダ情報処理方法
【課題】複数のレーダ装置の受信信号から検出された目標に関する情報を正確に同期表示させること。
【解決手段】第1レーダ装置1及び第2レーダ装置2は、空中線11、21を同一周期で回転させてレーダパルスを送受信して、目標検出部13、23により目標を検出する。データ処理装置3は、第1レーダ装置1及び第2レーダ装置2により検出された複数の目標情報を同期させて出力する。第1レーダ装置1及び第2レーダ装置2は、目標検出処理前後の方位値を目標情報に付加してデータ処理装置3に出力し、データ処理装置3は、目標検出処理前後の方位値をもとに複数の目標情報を基準値に合わせて遅延させる。
(もっと読む)
目標物探知装置および目標物探知方法
【課題】失探した目標物と、新たに探知された目標物を関連付け同一目標物であることを明確にし、目標物を継続して探知できる目標物探知装置および目標物探知方法を提供する。
【解決手段】レーダ装置ごとの覆域領域と、予め決められた領域から覆域領域を除いた領域を区分した覆域外領域との隣接に関する情報と、覆域外領域間の隣接に関する情報と、レーダ装置の覆域外へ移動した目標物を最後に探知した位置と日時と覆域領域と該目標物の速度、種別を、目標物の識別子に対応付けた失探情報と、レーダ装置が新たに探知した目標物の情報と、に基づいて、該失探した目標物と新たな目標物を関連付ける目標物探知装置である。
(もっと読む)
航空機位置測定システム、該システムに用いられる応答信号判別方法及び応答信号判別プログラム
【課題】受信局で受信される信号のみでモードA応答かモードC応答かが判別可能な航空機位置測定システムを提供する。
【解決手段】位置情報処理手段(データ処理部30)では、応答信号種類判別手段(受信情報収集部31、信号抽出記録部34、モードC信号変換部35、モードC信号種類判定部36、モードA信号変換部37、モードA信号種類判定部38)により、各受信局21,22,…,25で受信された応答信号のビット列が気圧高度情報(モードCコード)に変換されると共に、同気圧高度情報と幾何学的高度情報とが比較され、この比較結果に基づいて、上記応答信号がモードA信号に対応するモードA応答か上記モードC信号に対応するモードC応答かが判別される。
(もっと読む)
DME地上装置、及びDME地上装置による距離情報送信方法
【課題】所定の信号レベル以上のCW妨害波が入力されても、正常な応答信号の送信パルスを発生させることによってDME地上装置が運用停止に至らないようにする。
【解決手段】受信機15は、航空機(図示せず)から到来した測定用質問信号の信号レベルや自己診断を行うために質問信号発生部18で発生させた診断用質問信号の受信信号レベルを常時監視している。受信機15にCW妨害波が到来すると、監視制御装置17aの質問信号発生部18で発生させた診断用質問信号の信号レベルを可変増幅器19で増幅し、増幅された診断用質問信号の信号レベルがCW妨害波の信号レベルより高くなるように制御を行う。これにより、CW妨害波の信号レベルが高くなっても、送信機16から空中線11を経由して航空機へ安定した応答信号を送信することができる。したがって、DME地上装置10aは、航空機に対して安定的に距離測定情報を送信し続けることができる。
(もっと読む)
2次監視レーダ及び信号処理方法
【課題】電波障害時であっても機上からの情報を正しく復号可能にすること。
【解決手段】2次監視レーダ装置は、ターゲットに対して複数の質問を送信する送信部23と、前記ターゲットから送られてくる前記質問に対する応答を受信する受信部22と、前記ターゲットの方位及び距離をもとに前記応答のタイミングを予測し、前記タイミングに基づいて前記複数の質問に対する応答の受信判定を行い、前記受信判定において受信できなかった応答を受信するために質問を再送し、前記受信された応答の順番を並べ替え、前記順番に基づいてターゲットレポートを作成する信号処理装置3とを具備する。
(もっと読む)
シミュレータ
【課題】信号の輻輳、輻輳、フルーツ干渉等の発生時における二次監視レーダ及びSIF装置の動作を検証する。
【解決手段】対象範囲に検証の対象として所定時刻に存在が想定される機体の位置と、当該機体が応答する信号の種別と、当該機体の送信信号の情報を関連付ける機体データを記憶する機体データ記憶部13eと、動作を検証する装置が機体に送信した所定形式の信号を入力すると、機体データから、入力した信号の送信対象である機体の位置及び信号の種別と関連付けられる送信信号の情報を検索する機体検索手段13fと、機体データから検索された送信信号の内容を合成して模擬信号を生成する応答発生手段13gとを備える。
(もっと読む)
レーダ装置
【課題】近距離探知と遠距離探知とを実現可能であり、かつ、装置全体の小型化、簡単化及び低コスト化を実現することが可能なレーダ装置を提供する。
【解決手段】レーダ装置が近距離探知を行う場合には、信号処理装置10からの制御信号に従い、近距離探知時の受信信号を前段受信処理部51の低利得回路を介して後段受信処理部52へ導出する。また、レーダ装置が遠距離探知を行う場合には、信号処理装置10からの制御信号に従い、遠距離探知時の受信信号を前段受信処理部51の高利得回路を介して後段受信処理部52へ導出する。
(もっと読む)
距離測定装置
【課題】モニタ部が使用するパルス検出のポイントがずれないようにし、トランスポンダが送出するペアパルス信号をこのペアパルス信号の正確な位置において検出することが出来る距離測定装置を提供する。
【解決手段】アンテナ部11、トランスポンダ部13、方向性結合器12a、トランスポンダ部13から擬似質問信号に応答して2つのパルスを含むペアパルス信号でパルス変調された応答信号を入力されるモニタ部14とを備え、モニタ部14は、入力された応答信号を検波し、2つのパルス状のピークを有する波形信号を出力する検波部25aと、検波部25aが出力する波形信号のレベルが所要のスレショルドを越える期間を計測し、計測後、波形信号を所定時間遅延させ、この遅延させた波形信号の波形中のスレショルドを越えた点から期間の半分の期間が経過した点を波形信号の中心位置としてパルスを検出するパルス検出部42とを備える。
(もっと読む)
航空機情報表示装置、航空機情報表示方法、航空機情報表示プログラム
【課題】航空機の飛行状態の確認がしやすく、かつ、ホールディング状態の把握がしやすい航空機情報表示装置を提供する。
【解決手段】当該航空機の位置を表すデータであるセンサデータを取得するセンサデータ取得部と、航空機がホールディング状態から離脱しないエリアである第1のエリアを示す第1の座標情報と、航空機がホールディング状態から離脱可能である第2のエリアを示す第2の座標情報とを記憶するエリア記憶部と、前記航空機がどのエリアに存在するかを表す画像を表示する表示部と、前記センサデータ取得部が取得したセンサデータと、前記エリア記憶部に記憶された第1または第2の座標情報と、に基づいて、前記センサデータが示す航空機の位置が前記第1のエリアにあるか第2のエリアにあるかを判定し、判定した結果に基づいて、前記表示部に表示させる制御部と、を有する。
(もっと読む)
飛翔体探知方法及びシステムならびにプログラム
【課題】飛翔体の3次元位置を特定する飛翔体探知方法等を提供する。
【解決手段】地上を飛翔する飛翔体を撮影可能な観測器及び撮影画像を送信する送信器を備えた少なくとも2機の人工衛星と、送信された少なくとも2枚の画像データを受信するためのアンテナとアンテナにより受信した少なくとも2枚の画像データを解析して飛翔体の位置を解析する位置解析装置とを備えた基地局とで構成される飛翔体探知システムであって、位置解析装置は、各々の人工衛星の頂角及び方位角を算出する算出部と、これら頂角及び方位角から観測ベクトルを生成する観測ベクトル生成部と、各々の人工衛星の位置情報、速度情報等に基づいて座標変換行列を生成する座標変換行列生成部と、飛翔体位置初期値と座標変換行列とから係数を生成する係数生成部と、これら係数と観測ベクトルとから定められるパラメータ推定処理を実行するパラメータ推定処理部とを備えたことを特徴とする。
(もっと読む)
二次監視レーダ装置及びその二次監視レーダ装置に用いられる制御方法
【課題】マルチパスの影響を受けても、実際に飛行している目標対象物の検出を確実に行い得る二次監視レーダ装置を提供する。
【解決手段】制御装置16において、まずオールコールによりレーダ地上局がカバーする監視領域を走査して得られた目標位置情報をアドレスとともにメモリ17に記憶しておき、オールコールによる走査の実行後に、レーダ地上局がカバーする監視領域の全方位(アジマス方向)において、SLO走査を実行し、SLO走査で応答信号を返送した目標のアドレスと、メモリ17に登録されロールコールに移行した目標のアドレスとが一致し、目標位置に所定値以上の差があるか否かを判定し、アドレスが一致し所定値以上の差がある場合に、SLO質問に対し返送された応答信号をリアル応答として検出するようにしている。
(もっと読む)
モードSを有する二次監視レーダ装置及びその二次監視レーダ装置に用いられる制御方法
【課題】マルチパスの影響を受けて、リアル応答が欠落してから再度応答を検出した際に、ゴースト応答の影響を受けずにリアル応答の検出を行い得るモードSを有する二次監視レーダ装置を提供する。
【解決手段】制御装置16において、まずオールコールによりレーダ地上局がカバーする監視領域を走査して得られた目標位置情報をアドレスとともにメモリ17に記憶しておき、入力装置18により入力されゴースト応答が発生しやすいアジマス領域において、SLOスキャンを実行し、SLOスキャンで応答信号を返送した目標のアドレスと、メモリ17に記憶されロールコールに移行済みの目標のアドレスとが一致するか否かを判定し、一致する場合に、SLO質問に対し返送された応答信号をゴースト応答として検出し、ゴースト応答が検出された目標位置に対し、オールコール質問による応答へのロックアウトを無効とする指示を送出するようにしている。
(もっと読む)
レーダトランスポンダ
【課題】不要な信号が出力されてしまうことを抑圧できるレーダトランスポンダを提供する。
【解決手段】パフォーマンスモニタ6は、周波数制御信号発生器25と、可変減衰器28と、を備える。周波数制御信号発生器25は、電圧制御発振器27に対して周波数制御信号を送信することにより、前記応答信号の周波数を、第2周波数から第1周波数に変化させる動作と、第1周波数から第2周波数に変化させる動作とを実現可能である。可変減衰器28は、前記応答信号の周波数が第1周波数から第2周波数に変化するときの少なくとも一部の期間は、当該応答信号の出力レベルを減衰させる。
(もっと読む)
モードSを有する二次監視レーダ装置及びその二次監視レーダ装置に用いられる制御方法
【課題】マルチパスの影響でMIIP質問に対し、モードS応答を返送しないリアル機からモードS応答を返送できるようにした二次監視レーダ装置を提供する。
【解決手段】制御装置16において、モードSレーダ地上局がカバーする監視領域の少なくとも一部に対し、MIIP質問を行うことでモードSによるオールコール質問を行いつつゴースト機やリアル機からモードA/Cによる応答信号を返送させることで、反射物の反射によりゴースト機GTがロールコールに移行しているか否かを確認し、異なる方位から返送される複数の応答信号それぞれに付加されるモードAアドレスが一致する場合に、モードSによるオールコール質問に応答信号を返送されない目標方向に対し、SLOスキャンを実行し、SLO質問に対し返送された応答信号をリアル応答として検出するようにしている。
(もっと読む)
レーダ装置
【課題】 パルスドップラレーダにおいて、目標機の送信波やエンジンブレードの回転によって多くの不要波が発生し、目標の探知確率が低下するという問題がある。
【解決手段】 FMレンジング処理を行う際に、不要波を含む複数の受信ドップラ周波数の中から目標信号のみを抽出するために、目標信号特有の周波数データ、および強度データを利用した条件による判定処理を行い、最終的にそれらの条件を満たした信号のみに対してレンジ計算を行うことにより、不要波を抑えて正確な目標探知が可能となる。
(もっと読む)
81 - 100 / 389
[ Back to top ]