
Fターム[5J070AK19]の内容
レーダ方式及びその細部 (42,132) | 目的(効果) (6,033) | クラッタ消去 (225) | 気象クラッタ消去 (21)
Fターム[5J070AK19]に分類される特許
1 - 20 / 21
レーダ装置及びレーダ装置の信号処理方法
【課題】簡単な装置構成で、ウェザークラッタの影響を受ける領域における目標の検出率を向上させ、安定した目標追尾が行えるレーダ装置及びその信号処理方法を提供する。
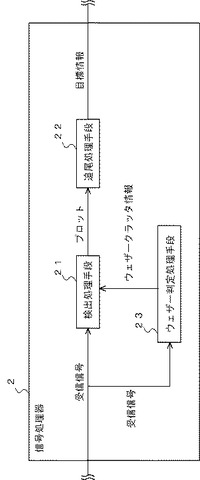
【解決手段】信号処理器2は、検出処理手段21、追尾処理手段22、及びウェザー判定処理手段23から構成されている。ウェザー判定処理手段23は、ウェザークラッタの影響を受ける領域(ウェザークラッタ情報)を算出し、ウェザークラッタ情報を取得した検出処理手段21は、ウェザークラッタの影響を受ける領域に対して、通常の検出判定用スレッショルドよりも低く設定されたウェザークラッタ領域検出判定用スレッショルドを適用するようにした。これにより、簡単な装置構成で、ウェザークラッタの影響を受ける領域における目標の検出率が向上し、安定した目標追尾を行うことが可能なレーダ装置が得られる。
(もっと読む)
物標探知方法、物標探知プログラム、物標探知装置、およびレーダ装置

【課題】クラッタを効果的に抑圧することができる物標探知方法を実現する。
【解決手段】まず、1スキャン分の探知データを極座標系で取得し、距離方向と方位方向とを二軸とする二次元座標系で記憶する(S101)。極座標系の二次元座標で記憶された探知データに対して、二次元ウェーブレット変換を複数の解像度で実行する。クラッタの特性に応じて設定された特定の解像度における展開係数分布に基づいて、極座標系からなるマスク画像データの各座標位置のレベルを設定する(S102)。座標位置毎に探知データのレベルからマスク画像データのレベルを減算して、表示画像データを生成する(S103)。
(もっと読む)
レーダ受信信号処理装置とその方法
【課題】 同程度の周波数変化を持つ目標信号と不要信号が混在するレーダ受信信号から、目標信号のみを的確に検出する。
【解決手段】 レーダ受信信号を周波数領域に変換することで周波数スペクトルを取得し(ステップS11)、取得された周波数スペクトルをエコー群それぞれの密度関数の和(混合密度関数)でモデリングし(ステップS12)、混合密度関数のパラメータの最適値を学習することにより推定し(ステップS13)、推定したパラメータから目標信号の平均ドップラー周波数、スペクトル幅及び受信電力を算出し、観測結果として出力する(ステップS14)。上記モデリングに際して、エコー群の周波数スペクトルを混合密度関数に当て嵌め、その当て嵌まり具合をペナルティ付きの尤度関数でもって評価するものとし、前記尤度関数のペナルティ項には、事前に測定した単独エコーの受信電力、ドップラー周波数、スペクトル幅の少なくともいずれかを用いる。
(もっと読む)
閾値設定方法、物標探知方法、閾値設定プログラム、物標探知プログラム、および物標探知装置
【課題】不要成分と物標とを識別する閾値を、物標の有無に影響されずに自動で設定する。
【解決手段】注目の距離位置[n]のエコーレベルEcho[n]と、近接位置[n−1]のエコーレベルEcho[n−1]との差分値diff[n]を算出する(S101)。差分値diff[n]が閾値γよりも高ければ(S102:Yes)、注目の距離位置[n]のエコーレベルEcho[n]と閾値レベルTh[n]とから新たな閾値レベルTh[n]を設定する(S105)。一方、差分値diff[n]が閾値γ以下であれば(S102:No)、注目の距離位置[n]のエコーレベルEcho[n]と閾値レベルTh[n]、および近接位置[n−1]の閾値レベルTh[n−1]とから新たな閾値レベルTh[n]を設定する(S106)。
(もっと読む)
監視装置、方法及びプログラム並びに監視システム
【課題】
バードストライクの危険のある鳥の接近を監視し、警告する。
【解決手段】
レーダ装置(10)が、周囲を走査して得られるレーダ画像データを周期的に出力する。コンピュータ(30)で動作する監視プログラムの背景生成機能(32a)が、複数シーン数のレーダ画像データから背景画像データを生成し、背景除去機能(32c)が、その後のレーダ画像データから背景画像データを除去する。2値化機能(32d)がエコー画像を2値化し、中心決定機能(32e)が各エコー画像の中心を決定し、雨雪除去機能(32f)が、雨雪を除去する。追跡機能(32g)は、複数シーンの前雪除去結果から、鳥を追跡する。警告機能(32h)は、鳥が所定領域に入ると警告を出力する。
(もっと読む)
レーダ装置
【課題】
レーダ主画面上の指定目標物に対する高分解能レーダ画像を随時確認することを可能にする。
【解決手段】
送信波を放射する送信部と、送信波を放射する送信部と、複数個のアンテナおよび受信機から構成され、前述送信波が目標物から反射した到来波を受信する受信部と、それぞれの受信機に対応してA/Dサンプリングを行うAD部と、画像処理によって自動的に追尾機能を実行し、到来方向推定の実施領域を決定する特定領域決定部と、到来方向推定を行うための評価関数(例えば、MUSICスペクトラム)を計算する到来方向推定部と、全方位のレーダ画像を表示する主画面表示部と、自動的に決定された特定領域の高分解能処理結果を表示する副画面表示部を具備する。
(もっと読む)
レーダ信号処理装置
【課題】レーダ信号処理装置がクラッタを抑圧し目標検出するときに、誤警報率を低く一定に抑えつつ、信号処理負荷を低減し規模を抑制する。
【解決手段】受信信号は、コヒーレント積分を行なうCINT処理系31と、MTI(移動目標指示)処理を行なうMTI処理系32に分配される。受信ビデオ選択部17にて、例えば操作員が目標、クラッタ、信号処理負荷などの状況を考慮していずれかの処理系信号を選択する。CFAR処理を用いずに作成したクラッタマップデータ10を参照して目標検出するときに、対象がクラッタ領域のときはCFAR処理に、クラッタフリー領域のときは固定スレッショルド検定に切替える処理切替部11、12を備える。この結果、処理負荷が高く規模の増大に繋がるCFAR処理を、クラッタ領域のときに限定して実施することにより、信号処理負荷を低減し、誤警報率を低く抑えつつ装置規模を抑制できる。
(もっと読む)
レーダ装置、目標探知方法及びプログラム
【課題】速度分散の大きいウェザクラッタ等を高度に抑圧でき、各受信信号で得たドップラ情報から目標の対レーダ速度を得る。
【解決手段】同一の変調の2以上の単位信号を送信単位である1パルス内に繰り返して配列したレーダ信号を生成する信号生成部と、前記レーダ信号を形成する同一の変調を施した単位信号を参照信号として、前記受信信号に含まれる単位信号の成分を圧縮するパルス圧縮部と、1パルス内でクラッタ成分を抑制するパルス内クラッタ抑圧部と、前記受信信号に消え残る信号成分を抑圧する消え残り信号抑圧部と、探知目標で反射した各距離の受信信号の単位信号をピックアップし、フーリェ変換処理により受信信号をドップラ周波数毎に積分して単位信号列積分値を得る単位信号列積分部と、前記単位信号列積分値を積分するパルス間信号積分部と、前記積分値について、閾値より大きい信号を目標信号として抽出する目標信号抽出部とを有している。
(もっと読む)
信号処理装置
【課題】本発明は、目標から到来した波動信号を処理し、クラッタの除去または抑圧を図る信号処理装置に関し、構成が大幅に複雑化することなく、誤警報確率を低く設定し、かつ安定に維持できることを目的とする。
【解決手段】目標から到来する波動信号と前記波動信号の瞬時値の平均値との差を求める信号抽出手段と、前記波動信号の瞬時値と、所定の係数と前記平均値との積とを比較する比較手段と、前記波動信号の瞬時値が前記積より大きい場合と小さい場合とに、それぞれ前記波動信号の瞬時値と前記差とを選択し、前記選択された瞬時値および差の列を前記目標の識別に供する選択手段とを備える。
(もっと読む)
レーダ装置
【課題】陸や物標からのエコーを残し、雨雪反射のみを良好に抑圧することができるレーダ装置を提供する。
【解決手段】レーダ装置は、区間判定部11を備える。区間判定部11は、受信信号をサンプリングした受信データ系列の中から、所定の距離範囲内の受信データを抽出し、当該抽出された受信データに基づいて、当該距離範囲が「陸/物標区間」であるか「雨雪/ノイズ区間」であるかを判定する。このレーダ装置は、受信データに含まれる雨雪反射を、雨雪反射除去閾値に基づいて抑圧するように構成される。内部データ根拠閾値算出部14は、「雨雪/ノイズ区間」であると判定された距離範囲についてのみ、当該距離範囲内の受信データに基づいて、当該距離範囲に対する雨雪反射除去閾値としての内部データ根拠閾値を求める。
(もっと読む)
レーダ装置
【課題】陸や物標からのエコーを残し、雨雪反射のみを良好に抑圧することができるレーダ装置を提供する。
【解決手段】レーダ装置は、自動利得制御部10を備えている。自動利得制御部10は、データ抽出部11と、閾値算出部12と、利得制御部13と、を備えている。データ抽出部11は、受信信号をサンプリングした受信データ系列の中から、信号レベルが距離方向でランダムに変動する受信データを、陸及び物標からのエコーを含まない受信データである雨雪/ノイズデータとして抽出する。閾値算出部12は、前記雨雪/ノイズデータに基づいて、雨雪反射及び受信機雑音を除去するための雨雪反射等除去閾値を算出する。利得制御部13は、前記受信データの信号レベルと、雨雪反射等除去閾値と、を比較し、信号レベルが雨雪反射等除去閾値以上の受信データのみを選択して出力する。
(もっと読む)
信号処理装置
【課題】 従来のCFAR(Constant False Alarm Rate)回路では、入力信号特性とCFAR回路特性が合わないため、近接する複数目標を検出できない場合や、クラッタを抑圧できず誤検出する場合があった。
【解決手段】 CFAR回路内の各参照セル内の最大値を除いて平均することにより、特定振幅によるノイズレベル上昇を抑圧することができる。また、クラッタのような広がりのある信号存在時には、GO−CFARを用いることにより、ノイズレベルが上昇し誤警報を抑圧することができる。
(もっと読む)
気象情報検出装置
【課題】グランドクラッタ信号の変動成分を、気象信号として誤検出すること無く除去して、気象成分のみを正しく抽出可能な気象情報検出装置と、この装置を用いた気象情報検出方法とを提供する。
【解決手段】気象情報検出回路の前段に、レーダー受信信号に含まれる気象成分を選択的に通過するウェザードップラ通過フィルタ回路を設ける。ウェザードップラ通過フィルタ回路は、気象成分にかかわる周波数帯域を通過するバンドパスフィルタを具備する。
(もっと読む)
レーダー装置
【課題】乗用車の屋根に搭載される場合に比しアンテナ装置の大きさが制限されず、さらに、クラッターフェンスを別個設けずに観測精度を高めることができるレーダー装置を提供することを目的とする。
【解決手段】レーダー装置1は、電波を送受信する電波レンズアンテナ装置3と、電波レンズアンテナ装置3に接続された信号処理装置5等の電子機器と、電波レンズアンテナ装置3及び電子機器を収納する輸送用コンテナ2とを備えている。輸送用コンテナ2の上部には、電波レンズアンテナ装置3において電波を送受信するための開口部24bが設けられている。
(もっと読む)
レーダ装置
【課題】クラッタのドップラー周波数折り返し発生時にこれを補正したクラッタ中心周波数推定処理を行うことでクラッタの消え残りを防止するレーダ装置を得る。
【解決手段】パルスレーダの受信信号からクラッタの数と中心周波数を推定するための信号を抽出するクラッタ推定用データ抽出手段1、抽出された信号から受信されたクラッタの数を推定するクラッタ数判定手段2、クラッタ数判定結果から実施するクラッタ抑圧処理の内容を切り替える切替器3、抽出された信号とクラッタ数判定結果を用いて、クラッタの周波数折り返しが発生する場合に生じる推定誤差を回避してクラッタ中心周波数推定を行う折り返し補正付クラッタ中心周波数推定手段4、切替器によりクラッタの数に従って処理内容が決定され、折り返し補正付クラッタ中心周波数推定手段から転送されるクラッタ中心周波数推定値を入力して、受信信号中のクラッタを抑圧するクラッタ抑圧処理部5を備える。
(もっと読む)
目標追尾装置、目標追尾方法、及び、プログラム
【課題】誤相関を低減することにより、目標を追尾するのに好適な目標追尾装置、目標追尾方法、及び、プログラムを提供する。
【解決手段】電波を発生する電波発生部と、前記電波を放射し、目標から前記電波の反射波を受信する電波送受信部と、前記反射波を画像信号に変換する信号処理部と、前記画像信号から前記目標を検出する目標検出部と、前記画像信号に基づき、前記目標を表示する表示部と、前記目標検出部が検出した検出結果に基づいて、前記目標を追尾するゲートを発生するゲート発生部と、前記ゲート内に前記目標が存在する場合、前記ゲート外の前記画像信号を分離する信号分離部と、を備え、前記目標検出部は、前記信号分離部が分離した信号に基づき、前記目標を検出する。
(もっと読む)
時間領域法を用いた二重偏波レーダ処理システム
本発明の実施形態では、二重偏波レーダシステムにおける環境パラメータの改良された推定を提供する。いくつかの実施形態では、環境パラメータは、2つの直交する偏波状態において受信されたデータの線形結合を用いて推定されうる。特に、発明の実施形態は、二重偏波レーダシステムにおける地上反射波及びノイズの低減を改良する。さらに、発明の実施形態はまた、二重偏波レーダシステムにおける、反射率の差及び/または同極の相関係数の大きさの少なくともいずれか、及び位相差を決定するためのシステムを提供する。  (もっと読む)
(もっと読む)
レーダ装置
【課題】気象クラッタのドップラー周波数を高精度に測定し、気象クラッタを適切に抑圧することができるレーダ装置を提供する。
【解決手段】パルス信号の送受信によって目標物を検出する装置であって、低周波受信パルス信号から気象クラッタを検出し、気象クラッタのドップラー周波数および強度を出力する気象クラッタ検出部6と、ビーム走査毎に、ドップラー周波数に対する折り返し補正処理を実行し、第1補正後ドップラー周波数を出力する第1折り返し補正部8と、ビーム走査間で、第1補正後ドップラー周波数に対する折り返し補正処理を実行し、第2補正後ドップラー周波数を出力する第2折り返し補正部10と、第2補正後ドップラー周波数に対する平均化処理を実行して、ドップラー周波数平均値を出力する平均処理部12とを備えたものである。
(もっと読む)
クラッタ判別方法およびレーダ装置
【課題】固定目標、ウェザークラッタ及びシークラッタの判別精度を高めて、固定目標、ウェザークラッタ及びシークラッタを移動目標と誤認する頻度を極小化可能にする。
【解決手段】レーダ装置の探知覆域内を複数の領域(セル)に分割するとともに、当該レーダ装置で受信されMTI及びMTDドップラフィルタ処理後に検出された目標に対して、前記セル単位でレーダスキャン毎の相関判定を実施し、相関判定結果を前記セル単位で累積記憶し、同一又は周辺セルとの相関の連続性が、予め設定したクラッタ判別条件と一致する目標をクラッタと判別する。
(もっと読む)
物体検出装置
【課題】多様な霧や湯煙等の不規則形状物体を簡易かつ確実に判定することができる物体検出装置を提供する。
【解決手段】車両の周辺に電磁波を送信して、その反射波から車両周辺の物体を検出する物体検出装置は、電磁波の送信タイミングと受信タイミングから反射点までの距離を算出し、電磁波の照射方向から電磁波が物体上で反射点の実空間ベクトルを算出する(STEP40)。また、複数の反射点を距離が所定範囲内となる反射点を1つの反射点群として分類し、該反射点群の存在する実空間上の範囲を1つのセグメントとする(STEP50)。そして、第1反射点群としてセグメント化された第1セグメントにおいて、第1セグメントを通る前記電磁波の走査線上で第1反射点以外の第2反射点をも生じている第1反射点が所定の比率以上存在する場合に、該第1セグメントから構成される物体を霧や湯煙等の不規則形状物体であると判定する(STEP60)。
(もっと読む)
1 - 20 / 21
[ Back to top ]