
Fターム[5J070BB14]の内容
レーダ方式及びその細部 (42,132) | 追跡(追尾) (806) | 追跡の特徴 (317) | 目標諸元を利用 (26)
Fターム[5J070BB14]に分類される特許
1 - 20 / 26
目標追尾装置
【課題】 従来、目標の諸元のみから予測時刻における目標の位置等を予測しているために、追随遅れを生じたり、観測された目標の位置と予測位置の差異が大きくなり、安定追尾をすることが困難となる場合があった。
【解決手段】 目標の移動先となる目的地及び予測経路を目的地の優先度、目標の運動諸元を元に推定し、その目的地に向けた移動経路を等速円運動や比例航法により予測することにより、予測位置と観測される目標との位置差を減少させ、追随遅れの解消や安定した追尾維持や追尾精度向上を実現する。
(もっと読む)
レーダ装置

【課題】追尾技術によって生成される航跡の推定精度の向上が効率的に実現されるように、追尾開始性能を最適化するためのレーダの最適な観測間隔を決定することのできるレーダ装置を得る。
【解決手段】レーダ10を制御するレーダ制御部9と、未知の目標を検出する追尾開始手段とを備え、レーダ10から追尾開始手段に対して定期的に観測値を提供するレーダ装置において、観測間隔を、追尾開始手段における実際の追尾開始性能が最適となる値に設定するためのシミュレーション処理手段をさらに備えている。シミュレーション処理手段は、解析用観測間隔設定部2と、追尾開始性能計算部3と、シミュレーション用観測間隔候補設定部4と、擬似観測値生成部5と、擬似航跡生成部6と、追尾開始性能集計部7と、シミュレーションに基づく観測間隔をレーダ制御部9に指示するレーダパラメータ指示部8とを含む。
(もっと読む)
センサ制御装置
【課題】複数の近接目標の追尾における相関性能を向上するためのセンサ制御を行う。
【解決手段】複数センサから得られる観測値を追尾処理し目標航跡を生成する際使用センサを決定するセンサ制御装置であって、複数の相関仮説を生成しながら目標航跡と観測値の相関を決定する相関決定部11、対応付けられた観測値を用い各航跡の運動諸元を計算するフィルタ処理部12、相関決定状況からセンサ制御を実施するべきか否か判定するセンサ制御要否判定部21、センサ制御を実施するべきと判定された場合に相関決定部が生成した航跡相関行列から競合を解消すべき航跡群を抽出する競合航跡抽出部22、競合を解消すべき航跡群の誤差共分散行列よりセンサの観測方向の誤差を算出する誤差楕円重なり計算部23、算出されるセンサの観測方向の誤差に基づいてセンサの観測方向の重なりを解消するセンサの選択とセンサ使用回数の決定を行う使用センサ決定部24を備える。
(もっと読む)
目標追尾装置
【課題】高分解能のレーダセンサによる観測情報の時系列データに基づいて、目標の位置、速度と同時に目標の長さを推定する際に、目標の長さを安定的に推定する目標追尾装置を提供する。
【解決手段】目標の位置、速度を推定する追尾フィルタである位置・速度推定部210と共に、目標の長さを推定する追尾フィルタである目標長さ推定部220を備える。位置・速度推定部210と目標長さ推定部220の間では、目標の位置、速度の各成分の平滑値と目標長さの平滑値を互いに相関させながら、目標の位置、速度と同時に目標の長さを推定する。
(もっと読む)
航跡割当装置
【課題】多スタート局所探索においてMFA問題の最適解探索を精度良く効率的に行うことのできる航跡割当装置を得る。
【解決手段】観測値情報取得部1と、観測値情報格納部2と、航跡候補生成部3と、航跡候補格納部4と、初期解生成部5と、最良解格納部6と、新規解生成部7と、新規解格納部8と、最良解更新部9と、ビルディングブロック候補情報格納部10と、ビルディングブロック判定部11と、ビルディングブロック情報格納部12と、終了判定部13と、探索結果出力部14とを備えている。新規解生成部7は、ビルディングブロックと判定された構成要素が必ず含まれるように新規解を生成する。最良解更新部9は、多スタート局所探索時にK個の最良解のうちのL個以上の最良解に同じ構成要素が含まれる場合に、当該構成要素をビルディングブロック候補と判定して登録する。
(もっと読む)
センサ統制システム
【課題】探知覆域の組合せ数が増大した場合でも計算機リソースの制限を考慮して探知覆域の最適化処理の高速化および効率化を図る。
【解決手段】探知覆域算出部は、同一センサに対する各探知性能値テーブルのメッシュ配列を分割した各ブロックにおける所定位置の1メッシュのみを対象として各テーブルの探知性能値を加算し、全センサにおいて加算値が最良のメッシュを持つセンサを選択し、当該センサにおいて、最良メッシュを含む近傍の複数メッシュを対象として対応する各テーブルの探知性能値をそれぞれ加算し、その加算値が最良なメッシュを選択してそのメッシュの方位・仰角を当該センサの探知覆域の方位・仰角と決定し、決定した方位・仰角に基づいて該当センサの距離覆域を算出し、算出した距離覆域と決定した方位・仰角に基づいて該当センサの覆域形状を算出する。
(もっと読む)
レーダ統制システム
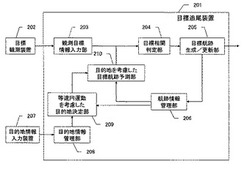
【課題】 目標物の事前情報とレーダ装置の性能や設置場所を基に、複数のレーダ装置の割当を設定するレーダ制御パラメータの最適値候補を算出するレーダ統制システムを提供すること。
【解決手段】 状況入力手段により入力されたレーダ制御傾向、目標状況、電波環境状況、レーダ配備状況の組合せに応じた複数のレーダ装置の目標に対する割当スケジュールを算出する際に用いる、最適な複数の各制御パラメータを算出する算出手段と、状況入力手段により入力されたレーダ制御傾向、目標状況、電波環境状況、レーダ配備状況と算出手段により得られる複数のレーダ装置のスケジュールを算出する際に用いる各制御パラメータと各制御パラメータを用いた場合の結果評価値とを記憶する記憶手段と、算出手段により算出された各制御パラメータより得られる評価結果を解析し、その評価結果から最適な制御パラメータの組合せを少なくとも一つ算出する解析手段とを備える。
(もっと読む)
目標信号検出装置及び目標信号検出方法
【課題】目標の位置を予測する閾値を制御することにより、目標を安定して検出することができる目標信号検出装置を得ることにある。
【解決手段】送受波器は、水中に音波を発信し、目標からの反響音を受信処理する。信号処理部は、受信信号が有する複数の要素を抽出し、抽出した特徴素を複数の時系列信号として出力する。信号検出部は、時系列信号の目標らしき信号を抽出し、特徴素を算出する。目標検出部は、時系列信号ごとに目標信号を統合して位置を算出する。目標類別部は、統合された各特徴素に対して重み付けを行い、統合された目標信号の目標らしさの程度を示す確信度を算出する。目標追尾部は、目標の予測位置を算出し、実際に検出した目標との相関を実施する。目標検出最適化処理部は、目標の予測位置を利用し、信号検出部を最適化する。
(もっと読む)
目標相関統合処理装置
【課題】 指揮統制するシステムにて、目標相関を統合処理する際、その処理対象は各情報源から収集した目標情報に対し、全目標の組合せとなる。従って、目標の増加による組合せ数の増大は複雑な計算を要する目標相関統合処理の処理負荷に影響を与えていた。
【解決手段】 指揮統制システムに接続し、指揮統制対象となる目標の情報源から目標情報を収集し、蓄積する目標情報収集器、目標情報収集器によって蓄積された目標情報より各目標情報を取得し、分布情報を生成する目標分布生成器、目標分布生成器によって生成された分布情報を取得し、その情報から各目標の速度相関判定器の対象目標組となる組合せを決定する目標組合せ抽出器、目標組合せ抽出器によって抽出された目標の組合せに対して、速度相関判定を実施する速度相関判定器により、総合的に相関の有無を判定する目標相関統合判定処理器の対象となる目標組合せを絞り込み、処理負荷を軽減する。
(もっと読む)
レーダ装置
【課題】MTI処理による追尾目標の探知においてブラインド速度領域にある探知困難な移動目標が存在した場合にも、初探知を含め探知・追尾を容易に行えるようにする。
【解決手段】目標の探知を探索走査時にはビデオ積分処理系行い、また追尾走査時にはMTI処理系で行うようにし、処理系のビデオ信号にプロット生成処理、目標の予想位置、速度の算出を行い、目標情報作成・管理部により、速度が閾値を超えた目標を追尾の対象目標として抽出して目標情報を作成すると共に、ブラインド速度領域に入る速度を持つ対象目標を抽出し、追尾PRF算出部により当該対象目標の速度のドップラ周波数を算出し、当該ドップラ周波数の1/2程度の値を追尾ビームの送信PRFとして算出して励振受信部に与える。
(もっと読む)
多目標追尾装置
【課題】センサから得られる属性情報を利用しつつ、その属性の急変が起きた場合でも正しい相関決定を行うことができる多目標追尾装置を得る。
【解決手段】入力された最新観測時刻における観測値と各航跡のゲート内外判定を属性に関して行う属性相関決定部1と、各航跡の位置情報に関するゲートを算出し、入力された観測値の位置情報が前記ゲート内にあるかどうかを調べ、入力された観測値がどの航跡と相関可能であるかを決定する位置情報相関決定部2と、観測値と航跡の属性、位置情報に関する相関結果を元に、最新観測時刻の目標の運動諸元を推定する航跡を生成する統合航跡生成部3と、生成された航跡を組合せて仮説を生成し、属性の急激な変動が起きる確率である属性変動確率パラメータを用いて各仮説の信頼度を計算する統合相関仮説生成部4と、計算された信頼度の低い仮説の削除し、似た仮説の統合によって仮説群を縮小する仮説選択統合部5とを設けた。
(もっと読む)
目標追尾装置及び目標追尾方法
【課題】目標の機動の種類が等速旋回の場合には目標の針路は変化するが速さは一定であり、機動の種類が等速旋回直進加減速の場合には目標の速さは変化するが針路は一定であるが、従来の方法では、変化する諸元の追従の遅れの回復を早める一方、一定である諸元の誤差が大きくなることが課題であった。
【解決手段】目標の機動を検知時に目標諸元誤差予測値を大きめに調整する際に、機動の種類と目標の針路を考慮して、目標諸元誤差予測値を、変化している諸元の方向に大きめに、一定の方の諸元の方向に小さめに調整することにより、変化する諸元の追従の遅れの回復を早めながら、一定である諸元の誤差の増大を避けることを可能にする。
(もっと読む)
目標類別装置
【課題】特徴量の信頼性の動的な変動を考慮することで、より高精度な区間値ファジィ推論方式による目標類別を可能とする目標類別装置を得る。
【解決手段】目標観測手段101により類別対象の目標が有する特徴量を得て、特徴量と特徴の度合いを表す入力ファジィ区間値とを関連付けたメンバシップ関数106と、メンバシップ関数106の区間の幅として定義できる特徴の曖昧さを特徴量から信頼性算出処理部108により算出された信頼性係数とを用いて、区間値ファジィ化処理部102により目標観測手段101によって得られた特徴量のファジィ化を行い、入力ファジィ区間値を得て、これから推論処理部103により目標種類の確からしさを表す出力ファジィ区間値を算出し、非ファジィ化処理部104によって算出された出力ファジィ区間値から目標種類を確定し、表示装置105に表示する。
(もっと読む)
レーダ制御装置およびネットワークレーダ
【課題】 監視覆域がそれぞれ設定される複数のレーダから構成されるネットワークレーダにおいて、監視対象エリアを効率的に監視するネットワークレーダおよびこれに用いるレーダ制御装置を得る。
【解決手段】 レーダ制御装置は、目標物の想定航跡d3およびレーダ諸元d1に基づき監視覆域ごとで且つ想定航跡ごとに想定航跡上の目標物の探知性能d4を算出する探知性能算出部6、探知性能d4に基づきレーダ1それぞれが設定する監視覆域を計算する待ち受け組み合わせ計算部8、および待ち受け組み合わせ計算部8が計算した監視覆域の設定をレーダ1ごとに指示するレーダ統制部2を備えたことを特徴とする。なお、レーダ1は所定の監視覆域を設定でき、レーダ制御装置が決定した監視覆域を設定して監視するものであり、想定航跡とは目標物の軌道を予想したものである。
(もっと読む)
目標表示装置及び目標表示方法
【課題】目標対象を効率良く探知することを可能とする。
【解決手段】目標情報データベース12aには、探知目標入力装置により探知された目標対象の目標情報が記憶される。CPU11は探知する目標対象の種類と探知期間とを指定する探知条件にしたがって目標情報データベース12aから目標情報を抽出する。この抽出された目標情報に基づいて、CPU11は目標対象の探知頻度を表す重複度を算出して重複情報データベース12bに記憶する。そして、CPU11は、重複情報データベース12bに記憶された重複度をもとに目標分布を作成し、目標分布を包含する地図情報を地図データ12cから読み出し、目標分布を地図上に重畳したデータを表示出力I/F16から出力する。
(もっと読む)
レーダ装置及びレーダ画像表示方法
【課題】異なるパルス幅の信号から得られた画像を同一画面上に同時に表示する場合であっても、すべてのレンジで同じ内容の追尾物標の運動情報を表示できるレーダ装置及びレーダ画像表示方法を提供することを目的とする。
【解決手段】所定の送信パターンで送信した2以上の異なるパルス幅信号を受信し、該受信した同じ送信パルス幅のエコー信号毎に、探知レンジに対応する表示用エコーデータを生成するエコーデータ生成部と、異なる送信パルス幅のエコー信号を用いて、表示用エコーデータと重畳する1つの追尾物標の運動情報を生成するARPA処理部と、前記ARPA処理部で生成された追尾物標の運動情報を、前記表示用エコーデータに重畳する表示出力合成部と、前記表示出力合成部で重畳した画像を表示する表示部とを備えることを特徴とする。
(もっと読む)
探知距離算出方法およびこれを用いたレーダシステム
【課題】算出される探知確率の誤差を小さくでき、しかも目標機の飛行回数を増やさずに、探知確率の信頼性を上げることができる探知距離算出方法。
【解決手段】目標を検出するレーダ装置の探知距離を算出する探知距離算出方法であって、検出された目標までの距離と信号強度比とから距離区間毎の信号強度比の平均値を求めることにより平均信号強度比を算出する区間毎平均信号強度比算出ステップと、算出された平均信号強度比から信号強度比を信号対雑音比に変換する信号強度比・信号対雑音比変換ステップと、変換により得られた信号対雑音比を、所定の距離における信号対雑音比に正規化する信号対雑音比正規化ステップと、正規化された信号対雑音比を探知確率に変換する信号対雑音比・探知確率変換ステップを含む。
(もっと読む)
レーダ装置
【課題】受信信号のパワースペクトルに現れるJEMの周期性に着目して、JEM発生の有無を検出する有効な方法を適用したレーダ装置を得ることを目的とする。
【解決手段】受信信号のパワースペクトルを算出するパワースペクトル算出部と、算出されたパワースペクトルの自己相関関数を算出する自己相関関数算出部と、算出された自己相関関数を、当該自己相関関数から算出した標準偏差に基づいて設定した閾値と比較することにより目標に回転体が存在するか否かを判定する判定部を備える。
(もっと読む)
目標類別装置
【課題】蛇行目標の類別性能を向上させる目標類別装置を得る。
【解決手段】追尾情報の目標の距離で受信信号の位相補償を行い、補償後の信号に基づき算出したドップラー周波数により補償後の信号を更に位相補償し、再補償した信号に基づきドップラープロフィールを生成し、追尾情報、上記変化量率から推定したアスペクト角の変化量に基づいてドップラープロフィールをクロスレンジプロフィールに変換し、追尾情報に基づいて推定したアスペクト角に対応する候補目標の受信信号をライブラリから抽出して候補目標のドップラープロフィールを算出し、該ドップラープロフィールをアスペクト角の変化量に基づいて参照プロフィールに変換し、両プロフィールに基づいて観測目標と候補目標の特徴量をそれぞれ算出し、両特徴量を比較して目標類別を行う。
(もっと読む)
レーダ装置
【課題】各レーダで探知すべき覆域を最適化し、短いデータ更新間隔で要求覆域を探知できるレーダ装置を得る。
【解決手段】要求覆域を保持する要求覆域保持手段2と、レーダ情報を保持するレーダ情報保持手段3と、覆域境界を表す覆域境界情報を保持する覆域境界保持手段5と、要求覆域、レーダ情報及び覆域境界情報に基づき、複数のレーダのそれぞれの覆域を求め、覆域を探知するために必要な時間であるデータ更新間隔を評価するデータ更新間隔評価手段6と、データ更新間隔評価手段6の出力に基づき、覆域が隣接するレーダ間のデータ更新間隔の差が減少するように、覆域境界情報を修正して覆域境界保持手段5に記録する覆域境界修正手段7と、要求覆域、レーダ情報及び修正された覆域境界情報に基づき、複数のレーダの各々に対するレーダ諸元を算出するレーダ諸元算出手段8と、レーダ諸元に基づき、複数のレーダを制御するレーダ制御手段9とを設けた。
(もっと読む)
1 - 20 / 26
[ Back to top ]