
Fターム[5J070BD08]の内容
レーダ方式及びその細部 (42,132) | 組合せ (788) | レーダと光学装置 (296)
Fターム[5J070BD08]に分類される特許
281 - 296 / 296
無線タグ検出システム

【課題】 送信電波の相互干渉を好適に防止しつつ所定の領域内における無線タグを好適に検出する無線タグ検出システムを提供する。
【解決手段】 複数の据置式無線タグ通信装置12と携帯式無線タグ通信装置14とが互いに異なるタイミングで送信信号を送信するように制御する送信制御部146を含むことから、時分割で前記送信信号を送信することで、前記複数の据置式無線タグ通信装置12から送信される送信電波と携帯式無線タグ通信装置14から送信される送信電波との干渉が好適に防止される。すなわち、送信電波の相互干渉を好適に防止しつつ所定の領域内における無線タグ16を好適に検出する無線タグ検出システム10を提供することができる。
(もっと読む)
レーダの設置情報の確認画面と調整画面の表示方法

【課題】
道路付近に設置したレーダの設置位置や設置方向の確認や調整を容易に行う。
【解決手段】
レーダの傍らにカメラを設置してレーダとカメラの相対位置と相対方向を冶具により所定値に保持しておき、カメラの画像中の所定物標を空間の座標系により点もしくは直線で定義し、所定の幾何式で計算した上記点あるいは直線の投影をカメラの画像上に描画したオーバレイ画面を合成して表示する。
オーバレイ画面中においての物標と描画物が一致していない場合、物標と描画物との表示位置が一致するように処理装置内のデータを調整するユーザインタフェース画面を表示して処理装置内のデータを調整することで、道路中と処理端末内のレーダの設置位置や設置方向が一致するよう画面上で調整できる。
(もっと読む)
マルチセンサ侵入検出システム
好ましくは、電磁スペクトラムの異なる波長範囲の2つ以上の検出器を使用する鉄道のプラットフォームに適した侵入検出システムが開示される。この検出器は、レーザスキャナとCCTVステレオカメラとであり得る。2つの検出器からの信号は、両方の検出器に侵入を示すように要求することによって、誤警告を回避するように処理される。領域のための背景輪郭が格納され、例えば人間の存在を決定する検出器の1つとともに使用される。処理は、両方の検出器に、同時に同じ場所で存在を検出することを要求する。各検出器は、明るさ水準の変化のような周囲の条件の変化を相殺する手段を含み得る。 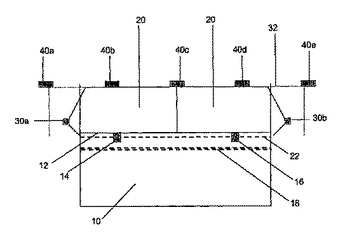 (もっと読む)
(もっと読む)
管内探査装置および案内装置
【課題】 管内を前進・後進移動する走行体に、レンズ付きカメラと空洞探査用レーダーとを備えると共に、地下に配設される管内へ容易に搬入可能な管内探査装置および案内装置を提供することである。
【解決手段】 ケーブルKを牽引しつつ管内を前進・後進移動する走行体3を先頭走行体31と後方走行体32とに分割し、前記先頭走行体31と前記後方走行体32とを屈曲自在に連結する構成の管内探査装置Rとし、前記先頭走行体を水平に、前記後方走行体を前記先頭走行体から上方にほぼ鉛直に屈曲させた状態で降下して、前記屈曲状態を水平状態に復帰して前進可能とする案内装置Gを用いて管内に搬入する構成とした。
(もっと読む)
車両用運転支援装置
【課題】 先行車の捕捉が不安定となった際に、適切なタイミングで走行制御を中断することのできる車両用運転支援装置を提供する。
【解決手段】 PCU6は、車外環境の悪化等によってIPU5による立体物の継続的な認識時間が短くなり先行車の捕捉とロストが頻繁に繰り返されている場合には、判定用カウンタCt1にカウンタ値を加算し、先行車が継続的に捕捉されている場合、或いは、先行車が継続的にロストされている場合にはクリアカウンタCt0の作用によって判定用カウンタCt1からカウンタ値を周期的に減算する。これにより、先行車の捕捉状態に応じて判定用カウンタCt1を適切に増減させることができ、この判定用カウンタCt1の計数値が第1の閾値に達してから少なくとも第2の閾値以下となるまでの間、走行制御のHALTを判定することにより、適切なタイミングでの走行制御の中断が可能となる。
(もっと読む)
センサシステムの作動方法および作動装置
センサシステムの作動方法および装置を提示する。ここでは処理ユニットはセンサシステムの少なくとも1つのセンサと、通信接続手段を介して接続されている。さらにこの処理ユニットは少なくとも1つのセンサにデータを伝送する。このデータは、センサの少なくとも1つの検出領域および/または探知領域、および/またはセンサのモードを制御するための制御データをあらわす。  (もっと読む)
(もっと読む)
コークス炉の操業方法
【課題】 炭化室の壁面及び天井形状を正確に計測し、壁面及び天井のカーボンの付着状態あるいは損耗状態を定量的に把握することによって、壁面及び天井の補修をより効果的に行う。
【解決手段】 電磁波距離計本体2と押出し装置5の押出しラム1の先端に設置される炉壁用アンテナ3Aとを備えた電磁波距離計と、押出しラム先端に設置されるアンテナ位置参照輝点(c)と、窯口に設置される基準輝点(b1)、(b2)と、各輝点を観察するためのカメラ9とを用い、各輝点の撮像結果から押出しラム先端の移動軌跡を算出し、押出し時の電磁波距離計の計測結果を、押出しラム移動軌跡を用いて補正して、炭化室壁面の絶対形状を算出し、壁面補修終了後、操業毎に壁面の絶対形状を計測し、補修終了直後の壁面の絶対形状の変化から、壁面へのカーボン付着状態あるいは壁面の損耗状態を定量的に把握すると共に、操業に伴う変化履歴から壁面の補修を行う時期を決定する。
(もっと読む)
距離画像センサの較正方法
【課題】電磁波を用いた車載用距離センサの位置あわせに関して、少なくとも部分的な較正を高精度に行う方法を提供する。
【解決手段】少なくとも1つの走査エリアに沿って検出レンジを走査することが可能であり、かつ走査エリア又は距離画像センサの車両に対する位置合わせに関して対応する距離画像を検出することが可能であるような、車両上に取り付けられる電磁放射線用距離画像センサを少なくとも部分的に較正するための方法であって、上記距離画像センサと少なくとも1つの較正面上の領域との距離を前記距離画像センサによって求め、前記位置合わせを少なくとも部分的に記述するパラメータ(特にピッチ角である方向性)の値を求められた距離を使用して決定する方法。また、同時にビデオ画像の較正を距離センサの較正結果を考慮して行い、較正機能部の位置座標によって距離センサ検出結果のビデオカメラ上への画像化が行われる。
(もっと読む)
発射された発射体の実際の方向と、所定の方向と、の間の偏差を、測定する方法及び装置
所定の進路から発射体の進路の偏差を測定する方法。前記方法は、所望された進路又は方向が指摘された、ターゲット領域における画像を用いる。その後、実際の方向又は進路が測定され、偏差が測定される。  (もっと読む)
(もっと読む)
車両周囲監視装置およびそれを具備した車両
【課題】 1つのセンサで車両周囲の広い領域が監視可能となる車両周囲監視装置およびそれを具備した車両を提供する。
【解決手段】 本発明の車両周囲監視装置は、物体の存在を検知する、あるいは物体までの距離を計測するセンサ1と、センサ1からの情報に基づいて車両100と物体との衝突などの危険度を判断する処理部3とを有する。センサ1は、車両の車輪側面に固設され、車両100が走行した際、センサ1とそのビームBとが車輪回転軸を中心に回転する。これによって、車両100が走行した場合、センサ1が検知する領域をセンサ単体の検知領域より広くすることができる。
(もっと読む)
自動車用物体認識システム
本発明は、少なくとも2個の物体認識センサを備え、該センサの認識範囲が進行方向において部分的に重なる、自動車用の物体認識システムに関する。本発明によれば、第1の物体認識センサが、所定の第1垂直認識角度において、その認識範囲内で道路表面を付随的に検出し、第2の物体認識センサは、第1の物体認識センサの第1垂直認識角度未満である所定の第2垂直認識角度において、第1の物体認識センサの認識範囲内で、進行方向において道路表面を検出しない。両方の物体認識センサが物体を認識したときに限り、評価ユニットが第1の物体認識センサの認識範囲において物体の存在を推測する。 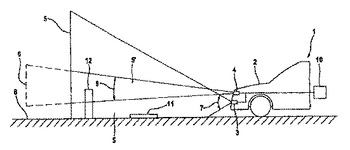 (もっと読む)
(もっと読む)
強化された監視被写体撮像
監視システム(20)が、被写体(32)を撮像するためにミリ波電磁放射線を使用して、人(36)、およびその人(36)によって保持される物体(38)を含む、被写体(32)を検問するように構成された第1のセンサ装置(26)を含むことが可能である。補助的な源(30)が、人(36)によって保持される可能性がある物体(38)に関係付けられることが可能な被写体(32)についての追加の情報をもたらす。関係情報は、生成された画像信号(125)、および被写体情報に関する。補助的な源は、第2であることが可能である。被写体位置(34)における人(36)によって保持される可能性がある物体(38)の所与の特性を検出するように適合されたセンサ装置(26)。その場合、人(36)が、所与の特性を有する物体(38)を保持しているかどうかについての関係情報が、生成されることが可能である。 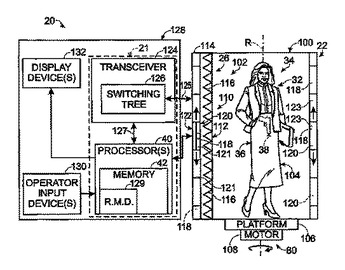 (もっと読む)
(もっと読む)
ミリメートルおよびサブミリメートル撮像装置
テラヘルツカメラは、固定対物レンズ(2)と、対物レンズ(2)の焦点面に配置された複数の検出器(3)とを有する。各々の検出器(3)は、アンテナが対物レンズ(2)の焦点面を横切って移動することができるように可動支持体(10)上に装着され、検出器(3)の出力を信号処理手段と接続するために可撓性導波管(4)を具備する。各検出器(3)はまた、テラヘルツ周波数以外の周波数を反射する再帰反射体(6)をも具備する。カメラの使用中に、各検出器(3)の空間的位置、すなわち検出器によって生成される信号の空間的発生源を正確に識別することができるように、各検出器(3)の再帰反射体(6)は非テラヘルツ周波数で照射される。テラヘルツカメラは、セキュリティ設備ならびに化学および食品処理産業で使用するのに特に適している。 (もっと読む)
車両用運転支援装置
【課題】 車両の姿勢角を検出するための専用のセンサを使用することなく車載レーダのビームの上下角を適切に制御し、コスト低減とレーダ性能の向上とを同時に達成する。
【解決手段】 画像認識装置16でカメラユニット15で撮像した画像から道路の左右白線を認識して撮像画像平面上の近似直線を求め、この近似直線の交点から車両のピッチ角を推定し、このピッチ角に基づいてレーダヘッド11の上下方向のアンテナ角度を可変するアクチュエータ12に対する制御指令値を算出する。そして、コントローラ13を介してアクチュエータ12を駆動し、レーダヘッド11の電磁波放射方向を道路面と平行に維持することで、ピッチ角を検出するための専用のセンサを使用することなく、コスト低減とレーダ性能の向上とを同時に達成する。
(もっと読む)
車載レーダ装置
【課題】 車両取付時の放射軸調整が容易な車載レーダ装置を提供する。
【解決手段】 レーダ放射軸L1とレーザポインタ光軸L2の水平座標が略一致するように、レーダ装置1にレーザポインタ7を一体的に固定する。このときに生じたレーダ放射軸L1と光軸L2との水平方向のズレ角は角度記憶手段4に記憶しておく。レーダ装置1は、目標物に向けて発したレーダの反射波より、水平角度算出手段3で目標物の水平角度位置を算出し、さらに、この算出した水平角度位置を、角度記憶手段4に記憶しておいた角度値を用いて補正する。
(もっと読む)
標識設置方法
【課題】 車両の前方を監視するセンサの取付角度を調整する基準点をなす標識を設置する標識設置方法において、センサを車両に取付る角度の調整が、その前方に広大な空間を必要とすることなく、狭い空間であっても簡易かつ正確に実施できる標識設置によるセンサの取付角度調整方法を実現することを課題とする。
【解決手段】 紐23の一端をトランクカバー12に固定し、トランクカバー12を開いた状態で、紐23を車両10に付された基準点上を通過するように車両前方に延ばし、車両前方に延ばされた紐23を基準にして標識21を設置することを特徴とする。
(もっと読む)
281 - 296 / 296
[ Back to top ]