
Fターム[5J070BD08]の内容
レーダ方式及びその細部 (42,132) | 組合せ (788) | レーダと光学装置 (296)
Fターム[5J070BD08]に分類される特許
161 - 180 / 296
マルチセンサ制御システム
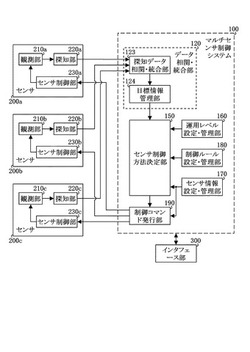
【課題】種類の異なる複数のセンサを適切に制御して、観測を行う。
【解決手段】センサ200a〜200cが出力した探知データを、データ相関・統合部120が入力し、相関・統合して目標情報を生成する。センサ制御方法決定部150は、センサ情報設定・管理部170が記憶したセンサの能力や、制御ルール設定・管理部180が記憶した制御ルールに基づいて、目標情報からセンサ制御方法を決定する。センサ制御方法決定部150が決定したセンサ制御方法に基づいて、制御コマンド発行部190がセンサ200a〜200cに対して、センサ制御コマンドを送信する。
(もっと読む)
車両用周辺監視装置

【課題】障害物等の不要な誤検出を抑制することが可能な車両用周辺監視装置を提供すること。
【解決手段】自車両前方に延在する所定前方領域内の障害物を監視する前方監視手段と、所定前方領域に比して自車両の側方側に延在する所定前側方領域内の障害物を監視する前側方監視手段と、を備える車両用周辺監視装置であって、自車両が側壁を有する所定道路を走行しているか否かを判定する所定道路走行判定手段を備え、所定道路走行判定手段により所定道路を走行していると判定された場合には、前側方監視手段による監視を抑制することを特徴とする。
(もっと読む)
車両用安全制御装置
【課題】レーダ出力と画像認識出力を同期させる。
【解決手段】車両前方の物体の位置および相対速度を検出するレーダユニット2と、車両前方を撮像するカメラ3aと、カメラ3aにより得られた画像上に処理領域を設定する処理領域設定手段と、処理領域の画像上の物体を認識する物体認識部3bと、レーダユニット2の検出結果および物体認識部3bの認識結果に基づいて物体と自車とのオーバーラップ量を算出するオーバーラップ量算出部4aと、を備え、レーダユニット2と物体認識部3bはトリガー信号発生部4bが発生させた同一トリガー信号の入力により検出または認識を開始し、オーバーラップ量算出部4aはトリガー信号により同期されたレーダユニット2の検出結果と物体認識部3bの認識結果とに基づいて安全装置を制御する。
(もっと読む)
危険な対象および物体を検出するためのシステムおよび方法
危険な対象および物体を検出するためのシステムおよび方法が開示される。一実施形態に従って、方法は、マイクロ波信号を生成することを包含し、このマイクロ波信号は、標的によって反射され、1つ以上の反射信号となる。1つ以上の反射信号は、アンテナアレイで受信される。1つ以上の反射信号は、デジタル反射信号に変換される。マイクロ波信号は、デジタル信号に変換される。デジタル反射信号およびデジタル信号は処理され、標的の三次元位置を決定する。デジタル反射信号およびデジタル信号は処理され、標的を識別する。デジタル反射信号およびデジタル信号は処理され、標的の状態を決定し、標的が危険な対象であるかどうかを決定する。  (もっと読む)
(もっと読む)
電波発射源可視化方法および装置
【課題】電波発射源の部位と、そこから発射される電波の周波数とを、容易に特定する。
【解決手段】電波発射源からの電波を受信する複数のアンテナ素子1a〜1bからなるアレーアンテナ2と、このアレーアンテナ2およびリファレンスアンテナ4で受信した電波ダウンコンバートする周波数変換部5と、アナログ信号をディジタル信号に変換するA−D変換部6と、到来方向推定処理部7と、この到来方向推定処理部7の出力位置情報とカメラ部8によって撮影された撮影画像とを合成する画像合成処理部9と、この画像合成処理部9から受けた合成画像を表示する表示部10とから構成され、前記到来方向推定処理部は到来方向推定処理に用いた複数の電波の周波数を抽出すると共に、抽出された周波数に対して、前記画像合成処理部において、各周波数に対応する異なる色情報を付与することにより、前記複数の電波の到来方向と共に電波の周波数を色表示する。
(もっと読む)
滞空ミサイル迎撃システム
【課題】低空で飛来するミサイルをより確実に迎撃する滞空ミサイル迎撃システムを得る。
【解決手段】滞空体により地形や建造物等による影響を受けない上空に滞留し、電波センサ及び光波センサを用いて低空で飛来するミサイルを全周方向かつ比較的遠距離から探知し追尾する。加えて、迎撃ミサイルを回動式のパレットに複数格納し、迎撃ミサイルを発射する際は、所望する飛翔経路の方向に迅速に指向させて発射するとともに、多くの射撃機会を確保する。
(もっと読む)
検知中心軸のずれ量検出方法
【課題】複数の物体検知手段が車両に搭載された場合であっても、極力短時間で、それぞれの物体検知手段の検知中心軸のずれ量を検出すること。
【解決手段】画像センサ40の検知中心軸のずれ量の検出に、先に算出されたレーザレーダ10の検知中心軸のずれ量を利用する。レーザレーダ10の検知中心軸のずれ量は、レーザレーダ10の車両への取付角度のずれに起因するばかりでなく、車両の前後中心軸方向と進行方向とのずれ(角度θ)にも起因して生じる。そして、車両の前後中心軸方向と進行方向とのずれは、画像センサ40の検知中心軸に対しても同様に影響を与える。このため、レーザレーダ10の検知中心軸のずれ量に基づいて、画像センサ40がターゲット72を検出するときのターゲット検索エリアを設定する。これにより、その範囲を狭くしながら、確実にターゲット72を含むように、ターゲット検索エリアを設定できる。
(もっと読む)
物体検知装置
【課題】
自動車の周囲の物体をより精度良く検知する
【解決手段】
第1のセンサ101のカバレッジ201−Sにある物体の所定の特徴量を求めて記憶するとともに、物体が第1のセンサのカバレッジ201−Sから第2のセンサのカバレッジ201−Mに移動したときに、記憶装置に記憶された当該物体に関する特徴量と、第2センサ102で認識した結果を処理する処理部で処理された認識結果を分析することにより求めた物体の所定の特徴量とに基づいて、物体との相対距離を求める。
(もっと読む)
物体検出装置
【課題】自車両に対する物体の横位置を精度よく推定する物体検出装置を提供する。
【解決手段】物体検出装置は、ECUにおいて、ミリ波レーダによって検出された自車両と物体との距離Z及び物体の横位置Xmを取得し(S1)、ステレオカメラによって検出された物体の横位置Xiを取得し(S2)、距離Zが遠くなるに従って大きくなる重み付け係数αを横位置Xmに掛け合わせることによって得られる横位置値と、距離Zが近くなるに従って大きくなる重み付け係数βを横位置Xiに掛け合わせることによって得られる横位置値とを加算するよって、物体の横位置Xを推定する(S3)。これによって、精度よくミリ波レーダが作動する距離ではミリ波レーダによる検出結果の重み付けを大きくし、精度よくステレオカメラが作動する距離ではステレオカメラによる検出結果の重み付けを大きくして使用することができる。
(もっと読む)
車載用レーダシステム
【課題】車両の速度が速かったり、旋回半径Rが小さい場合、車載用のレーダ装置のレーダ視野角が狭くなり、レーダ装置の追従性能が低下して障害物の補足が困難となる。
【解決手段】車載用のレーダ装置1と、AFS(適応型照明システム)の照明装置2とを備えた車載用レーダシステムにおいて、レーダ装置1に、照明装置2の照射方向であるスイブル角度に基づいて、レーダ装置1の走査範囲の偏向角度を制御する制御手段16を設け、例えばカーブ走行下でレーダの検出性能が低下することを軽減するようにした。
(もっと読む)
周辺監視システム
【課題】より速やかに他車の追尾を開始することのできる「周辺監視システム」を提供する。
【解決手段】レーダ装置1の計測データに基づいて、未追尾の他車の検出と、検出した他車の存在の複数回の確認の処理とを経て、存在を確認した他車の追尾を開始する物標追尾部4を設ける。そして、物標追尾部4において、レーダ装置1の計測データから未追尾の他車の発生が検出されなかった場合でも、他車認識部3がカメラ2で撮影した画像に対する画像認識によって、物標追尾部4において未追尾の他車が識別された場合には、レーダ装置1の計測データに基づいて、当該他車の存在を複数回確認する処理を開始する。
(もっと読む)
車載レーダ装置
【課題】車両に搭載される車載レーダ装置に関し、前方車両の検出漏れを防止し、且つ障害物を車両と認識するのを防止する。
【解決手段】車載レーダ装置(1)が、自車に対する物体の相対角度検出範囲を3つ以上の領域に分割し、カーブや、一般/高速道路の別等の道路情報、自車の走行速度、更には、天候による路面状況の変化等、車両の置かれた具体的な走行環境に応じて、各領域に、適切な閾値を設定する信号処理部(19)を有する。同一車線の前方を走行中の車両と、障害物とを区別して検出を行うことを可能とし、障害物の検出漏れを引き起こすことを防ぐことを可能にする。
(もっと読む)
乗物または設備のための操舵および安全システム
乗物または設備のユーザが、乗物または設備の周囲状況および乗物または設備自体に関する高度でかつ最新の情報を取得することを可能にするための、乗物用システムが提供される。このシステムは、海洋船の上に位置してもよく、また、船上と船外の両方に位置する多数の異なる情報源からの情報を統合する。それらの情報は、船舶上の高度なレーダーおよびソナーサブシステムからの情報、従来の機器およびセンサからの情報、ならびに陸上のコントロールセンターからアクセスされる陸上および海上設備およびEO衛星からの情報を含む。このシステムは、利用可能である場合、通信衛星および/または無線インターネットによってコントロールセンターと通信してもよい。データを処理し、提示するためのデータ処理装置もまた提供される。データは、空間内において3次元で受信され、処理され、提示され、時間がデータに対して4つめの次元を提供するように、リアルタイムまたはほぼリアルタイムに更新される。データを提示するためのグラフィカルユーザインターフェースも提供される。このグラフィカルユーザインターフェースは、エンドユーザ自身の観測結果が提示されたデータに一致しない場合、システムにおいてエラーを報告するための機能を提供する。さらに、2つ以上の船舶を含むデータを収集するシステム、コントロールセンター、ならびに、船舶およびコントロールセンターが通信する手段が提供される。このシステムは、収集されたデータを記憶するカタログおよび記憶ネットワークを備える。すべてのデータは、データの関連する品質尺度と共に記憶される。  (もっと読む)
(もっと読む)
移動検出画像生成装置
【課題】移動する物体の移動を検出するために用いる動画像として、環境の影響を受ける度合いが低減するように加工された動画像を提供する。
【解決手段】抽出手段1は、道路上の物体を光学的に逐次撮像して得た複数の撮像画像より、物体を撮像した時刻における路面上での該物体の位置を示す位置情報に基づいて、該時刻での該位置における路面からの高さが所定の範囲内の領域が写っている部分を抽出する。生成手段2は、抽出手段1が抽出した部分を加工した画像を時刻に従って並べて移動検出画像を生成する。位置情報は例えばレーダ型センサにより計測された距離である。移動検出画像は、抽出した部分に対応する画像を位置に対応付けて配置した位置対応画像や、撮像画像において前記部分を識別することができるように加工した識別画像を、時刻に従って並べたものでもよい。
(もっと読む)
物体検出装置
【課題】複数種の物体を精度よく検出する。
【解決手段】距離分布生成部4は、距離画上に設定された複数の区分のそれぞれについて、この区分内に存在する距離値のヒストグラムに基づいて距離代表値を算出する。第1の物体検出部5aは、先行車のサイズに応じて設定された第1の検出条件と、区分毎の距離代表値とに基づいて、複数の区分を同一物体とみなしてグループ化し、距離画像上において先行車を検出する。第2の物体検出部5bは、歩行者のサイズに応じて設定された第2の検出条件と、区分毎の距離代表値とに基づいて、複数の区分を同一物体とみなしてグループ化し、距離画像上において歩行者を検出する。信頼性評価部6は、先行車および歩行者のいずれかを選択するために、所定の評価規則に基づいて、両者の信頼性を評価する。
(もっと読む)
周辺監視システム
【課題】背景に四輪車が写り込んだ状態で撮影された自動二輪車を良好に検出できる「周辺監視システム」を提供する。
【解決手段】
カメラ2で撮影した画像中の物体が写り込んでいる領域を物体画像領域310として抽出し、物体画像領域310のエッジ画像に対する画像認識処理によって自動二輪車と四輪車とを識別する。エッジ画像に対する画像認識処理によって自動二輪車が識別されず、かつ、レーダ装置1が、物体画像領域310に写り込む方向に、当該方向について前後に接近している複数の相対位置を計測している場合には、物体画像領域310のエッジ画像から水平方向に所定長さ以上長いエッジを消去した縦エッジ強調画像320を作成し、縦エッジ強調画像320に対する画像認識処理によって自動二輪車を識別する。
(もっと読む)
レーダ画像処理装置及びレーダ画像処理方法
【課題】地表面の変化を正確に抽出することができるレーダ画像処理装置及びレーダ画像処理方法を提供する。
【解決手段】通信インターフェース部10が、異なる時刻に取得された同一観測対象の複数のレーダ画像データを取得してレーダ画像保持部12に格納し、位置合わせ処理部14が、上記複数のレーダ画像データをレーダ画像保持部12から読み出し、各レーダ画像データを相互に位置合わせする。次に、特性値算出部18が位置合わせ後のレーダ画像データから観測対象である地表の状態を表す複数の特性値を算出する。変化候補域抽出部34は、上記特性値毎に変化候補域を抽出し、判別法決定部24が決定した閾値、抽出条件及び判別関数を使用して、判別部36が上記変化候補域から観測対象の変化域を抽出する。
(もっと読む)
割込車両判定装置
【課題】誤判定をより減少させた割込車両判定装置を提供する。
【解決手段】ACCシステム1はミリ波センサ10、ステレオカメラ11、アクセルペダル12、車速センサ13等のセンサ類と、先行車選択部20と、割込車両判断部30と、走行制御ユニット40と、ブザー51等の制御対象とを備えて構成されている。先行車選択部20が、先行車両が入替わったと判定したときは、割込車両判断部30は通常より割込車両判定を行う閾値を高くして判定を行う。これにより、誤判定をより減少させることができる。
(もっと読む)
超広帯域レーダセンサおよびネットワーク
超広帯域レーダ動きセンサが関心領域に戦略的に配置され、無線アドホックネットワークと通信して、遠隔領域の監視を提供する。動きセンサにインパルスレーダ、心拍及び呼吸監視を組み合わせることでさらに識別を向上させる。  (もっと読む)
(もっと読む)
物体検出手段の試験装置、及び試験車両
【課題】物体検出手段の試験コストを低く抑えつつ、試験精度を向上させることが可能な物体検出手段の試験装置、及び試験車両を提供する。
【解決手段】試験装置10は、物体検出手段20,22を取り付ける取付部12と、物体60を検出する検出位置である第1位置と物体60との衝突を回避する第2位置との間で、取付部12を位置切換可能に支持する支持部14と、支持部14を駆動して第1位置と第2位置との間で取付部12の位置を切り換える駆動部16と、を備える。この試験装置10が車両40の荷台42に搭載され、試験車両100が構成される。
(もっと読む)
161 - 180 / 296
[ Back to top ]