
Fターム[5J070BD08]の内容
レーダ方式及びその細部 (42,132) | 組合せ (788) | レーダと光学装置 (296)
Fターム[5J070BD08]に分類される特許
121 - 140 / 296
車載用レーダ装置、及び車載用レーダ制御方法
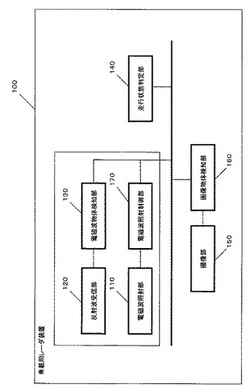
【課題】人体に電磁波を照射する可能性が高い場所を車両が走行している場合に、人体への電磁波照射を低減すると共に、車両が当該車両周辺の物体と衝突することを回避することができる車載用レーダ装置を提供する。
【解決手段】車載用レーダ装置であって、自車周辺に電磁波を照射する電磁波照射部と、電磁波を照射することによって自車周辺の物体から反射される反射波を受信する反射波受信部と、反射波に基づいて、自車周辺の物体を検知する電磁波物体検知部と、自車周辺の物体を補助的に検知する物体補助検知部と、所定の場所を自車が走行している状態か否かを判定する走行状態判定部と、所定の場所を自車が走行している状態であると判定したときに、電磁波物体検知部の検知方向と同じ方向の物体補助検知部の検知状態に応じて、電磁波照射部による電磁波の照射を停止、又は照射強度を弱める電磁波照射制御部とを備える。
(もっと読む)
電波発射源可視化装置及びその方法

【課題】マルチパス環境下における精度の劣化を防ぐことの可能な電波発射源可視化装置及びその方法を提供すること。
【解決手段】電波発射源可視化装置において電波の到来方向を推定するにあたり、遅延タップ付のアダプティブアレイアルゴリズムを用いて遅延波を打ち消すような複素ウェイトを算出する。ビーム形成に際してこの複素ウェイトを用いれば遅延波の到来方向にヌルを向けるようなビームを形成することができる。さらに、複数ウェイトの値がマルチパス遅延波の到来方向に対応することにも着眼し、このことを用いて、遅延波の到来方向にヌルを向けるようなビームを2次元平面上に可視化する。この可視化像とカメラなどで取得した背景画像を重ね合わせることにより、マルチパス環境においても電波発射源の位置特定を可能とする。
(もっと読む)
レーダ装置、及び方位角検出方法
【課題】異なる周期で動作する画像認識装置からの検出位置を用いて、レーダ装置により物標の方位角を精度良く検出する。
【解決手段】レーダ装置に、前記探索領域の撮影画像に基づいて第1の周期ごとに前記物標の位置を検出する画像認識装置から、当該検出された検出位置が入力される入力手段と、複数の前記入力された検出位置に基づいて、前記第1の周期より短い第2の周期ごとに前記物標の方位角を推定する方位角推定手段と、前記探索領域のうち、前記推定された推定方位角付近では第1の方位角刻み、それ以外の範囲では前記第1の方位角刻みより大きい第2の方位角刻みで前記物標の方位角を検出する方位角検出手段とを備えることで、物標の方位角を精度良く検出できる。
(もっと読む)
物体種別判定装置、物体種別判定方法、及び物体種別判定用プログラム
【課題】レーダによる検出結果に基づいて、車両等の物体の種別を適切に判定することができる物体種別判定装置、方法、及び物体種別判定用プログラムを提供する。
【解決手段】物体種別判定装置は、レーダ20により複数の方位角に電磁波を照射し、それぞれの方位角における物体の検出点を取得する検出点取得手段11と、取得された複数の検出点のうち、同一の物体についての検出点であると想定される検出点をグループ化して、点列データとして抽出する点列データ抽出手段12と、抽出された点列データが、方位角が増加又は減少するに従って、検出点のレーダ20からの距離が直線的に減少する第1の状態から直線的に増加する第2の状態に切り替わる変位特性を有するか否かを認識する変位特性認識手段13と、変位特性認識手段による認識結果に応じて、点列データが抽出された物体の種別を判断する種別判断手段14とを備える。
(もっと読む)
物体検出装置及び測距方法
【課題】レーダ受信信号から直接計測することができない遠方に存在する対象物体までの距離を高い精度で演算する物体検出装置を提供する。
【解決手段】
【請求項1】車載のカメラ10の撮像画像の情報に基づいて、測距対象となる対象物体と測距の基準とする基準物体との相対位置関係を算出する物体間相対位置算出部30と、車載のレーダ測距装置20により取得された受信信号に基づいて、測距の基準として選択された基準物体と自車両との間の基準距離を求める基準距離計測部40と、レーダ測距装置20が対象物体までの距離を測距できない場合は、対象物体と基準物体との相対位置関係と自車両から基準物体までの基準距離とに基づいて自車両から対象物体までの距離を演算する距離演算部50とを有する。
(もっと読む)
物体検出装置および物体検出方法
【課題】静止物体および移動物体についての座標算出を高精度に行うこと。
【解決手段】画像検知部が、車両に搭載されたカメラによって時系列に撮像された2つの画像を対比することによって静止物体の相対的な空間配置をあらわす相対3次元座標を取得し、レーダ検知部が、画像に対応する範囲について照射した照射波に係る反射波に基づいて静止物体および移動物体に係る距離および方位を取得し、物体座標認識部が、取得された方位に存在する前記画像内の静止物体について取得された距離を用いて相対3次元座標から絶対3次元座標を算出するように物体検出装置を構成する。
(もっと読む)
センサ情報融合装置
【課題】2D角度観測値を用いた距離推定値初期値と距離変化率推定値初期値の高精度化、2D角度観測値を用いたバッチ処理後の距離推定値と距離変化率推定値の高精度化を可能にする。
【解決手段】センサによる2D角度観測情報に基づいて2D角度航跡を算出する2D角度追尾手段と、2D角度観測情報と2D角度航跡について事前設定された圧縮間隔に基づいて最小2乗統合により圧縮処理して統合2D角度観測情報を算出する2D角度観測情報圧縮手段と、3点の統合2D角度観測情報に基づいて距離推定値初期値および距離変化率推定値初期値を算出する距離推定値初期値算出手段と、上記算出初期値を初期値として、2D角度観測情報を事前に設定したバッチデータ数分蓄積してバッチ処理して距離推定値および距離変化率推定値を算出する距離算出バッチ処理手段を備える。
(もっと読む)
周辺監視装置および周辺監視方法
【課題】自車が他車の死角領域内で走行中であることを運転者に意識させて運転者に注意を促すことができる「周辺監視装置および周辺監視方法」を提供する。
【解決手段】自車の周辺に存在する他車に対する自車の相対的な位置を検出する位置検出部11と、他車の運転者にとっての死角を含む警告発生対象領域を検出する対象領域検出部12と、警告発生対象領域内に自車が存在するか否かを判定する存在判定部13と、警告発生対象領域内に自車が存在すると判定された場合に警告を発する警告発生部14とを備え、自車視点による自車の死角ではなく、他車視点による他車の死角を含む警告発生対象領域を自車にて検出し、当該対象領域を用いて警告発生の必要性を判定することにより、走行中の自車が他車の死角に入ったときに警告が発せられるようにする。
(もっと読む)
物体検知装置
【課題】自車両の外界に検知された物体が虚像か実像かを容易かつ適切に判定する。
【解決手段】物体検知装置10は、自車両の進行方向に存在する物体を検知する外界センサ11および物体位置検出部31と、検知された物体の自車両に対する相対距離に係る相対関係を算出する相対関係算出部32と、検知された物体が虚像か実像かを判定する虚実判定部34とを備え、自車両に相対する向きに移動する第1物体および第2物体が検知された場合に、第1物体と第2物体との間の車両左右方向距離が所定左右方向距離以上であり、かつ、第1物体と第2物体との間の車両前後方向距離が所定前後方向距離以下である場合に、第1物体および第2物体を判定対象として選択する判定対象選択部33を備え、虚実判定部34は、判定対象選択部33により選択された判定対象が虚像か実像かを判定する。
(もっと読む)
車両周辺監視装置、車両、車両周辺監視プログラム
【課題】撮像装置を通じて対象物の検出される一方、レーダを通じてこの対象物の存在が明確に認識されない場合でも、車両からこの対象物までの距離を高精度で測定することができる装置等を提供する。
【解決手段】本発明の車両周辺監視装置10によれば、赤外線カメラ(撮像装置)11の撮像領域を構成する一の対象領域において複数の対象物が検出され、かつ、各対象物について異なる測定距離が測定された場合、第1対象物の測定距離が、レーダ装置12により取得された反射強度データに基づき、反射強度が最高のピークを示す「第1距離」に補正される。また、当該複数の対象物のうち第i+1対象物(i=1,2,‥)の測定距離が、反射強度データに基づいて第i+1対象物の測定距離を基準とし、かつ、第1距離ないし第i距離のすべてを包含しない第i+1距離範囲において反射強度が最高のピークを示す「第i+1距離」に補正される。
(もっと読む)
物体検出装置、物体検出方法および物体検出システム
【課題】歩行者のような弱反射物体であっても最初のレーダ探索で検出すること。
【解決手段】物体種別判定部が、車両に搭載されたカメラによって撮像された画像に基づいて物体の種別を判定し、閾値選択部が、判定された種別に対応付けられた所定の閾値を選択し、画像に対応する範囲について照射した照射波に係る反射波の強度が選択された閾値以上であることを条件として物体を検知するように、物体検出装置あるいは物体検出システムを構成する。
(もっと読む)
車両の接触回避支援装置
【課題】障害物の周囲に道路構造物などの多くの物体が存在するときも、それらと区別して障害物を早期に認識して迅速に回避するようにした車両の接触回避支援装置を提供する。
【解決手段】自車の周囲に存在する物体からの反射波が連続してm回あるいは通算してn回受信したとき、その物体を検出する物体検出手段(レーダ装置)と、自車の運動状態を検出して自車の進路を予測すると共に、進路上に物体が存在するとき、障害物と認識して自車との接触の可能性を判定し、t回接触の可能性があると判定される場合、物体との接触回避を支援する接触回避支援動作を実行する接触可能性判定手段を備えた車両の接触回避支援装置において、障害物の認識が困難な環境か否か判定し(S100)、肯定されるとき、m,n,tを減少補正して物体検出手段と接触可能性判定手段の応答性を向上させる(S102)。
(もっと読む)
ソーラー電池式移動障害物遠隔感知機
【課題】
従来から山間部やビルの間での視界不良のカーブや交差点で、反対側から来る車などの移動物の早期発見が困難であった。これは電源がないのと、レーダーやセンサの応用がなされていなかった為で、これらを可能とした装置を提供するものである。
【解決手段】
電源にソーラー電池を利用、主柱パイプにレーダー及センサを装着、それに点滅ライトを連結させ、移動する障害物をレーダーとセンサが感知し、自動的に必要な方向のライトを点灯、更に自動的にLED文字板の文字を表示、大型設置工事を必要とする事なく、種類も目的に応じ置床用か壁掛用かを選定して使用でき、設置も容易な構造を特徴とする、ソーラー電池式移動障害物遠隔感知機が完成できた。
(もっと読む)
目標追尾誘導装置及び方法
【課題】レーザ照射機、目標、飛翔体のなす角に関係なく、シーカが安定した強度の反射光を検出することができ、これにより、レーザ出力調整装置等を付けることなくシステムが構成でき、レーザ照射機の寸法、質量増を抑えることができ、運搬や設置等の運用上の制限を無くすことができる目標追尾誘導装置及び方法を提供する。
【解決手段】目標1に対しレーザビーム3を照射するレーザビーム照射装置12と、目標によるレーザビームの反射光4を検出する赤外線シーカ16を搭載した飛翔体14とを備え、目標に対しレーザビーム3を照射し、その反射光4を赤外線シーカ16で検出することにより、目標を捕捉し、目標方向に向けて飛翔体を飛翔させる。レーザビーム照射装置12で発生するレーザビーム2の偏光を直線偏光から円偏光に変換する偏光変換素子18(4分の1波長遅相子)を備え、レーザビームの偏光を直線偏光から円偏光に変換して円偏光のレーザビーム3を目標に対し照射する。
(もっと読む)
物体、特に危険物を検出する装置
本発明は、物体を検出する装置に関する。この装置は、少なくとも1つのマイクロ波周波数送信器(2)と、少なくとも1つのマイクロ波周波数受信器(1)とを備える。受信器(1)は、送信器(1)を中心として相対的な回転移動を行い、信号は、相対的な回転の円上の受信器のいくつかの位置で個人に向けて送信され、物体の点で反射され、位置において受信器(2)により受信される信号は、処理手段に供給されて、レーダ画像が形成される。受信器(1)および送信器(2)は、非常に低い慣性モーメントを有する円盤(5)上に設置することができる。本発明は特に、人が携帯する武器または爆発物の検出に適用される。 (もっと読む)
物体検出装置
【課題】物体の端部を高精度に特定することができる物体検出装置を提供する。
【解決手段】自車両の前方を走行する他車両の位置情報を一定の周期で繰り返して検出するLIDAR2と、自車両の前方を撮像して自車両の前方を走行する他車両を撮像するカメラ3と、LIDAR2から送信されるLIDAR点列と、カメラ3から送信される撮像画像撮像画像とにより、自車両の前方を走行する他車両の端部を特定して、この他車両の中心位置及び向きを検出するECU4とを備えている。そして、このECU4は、LIDAR点列に近似された物体検出直線αと、撮像画像における矩形領域の左右端の方位直線β1,β2との交点x1,x2を、他車両21の左右端部として特定する。
(もっと読む)
物体検出装置
【課題】反射強度の入力が不安定な場合には、物体の位置情報を推定することができる。
【解決手段】電磁波センサ30及び画像センサ31と、反射強度が所定値より低いか否かを判定する強度判定部21と、車両進行方向における物体Hの速度成分が所定値より低いか否かを判定する速度判定部22と、強度判定部21によって反射強度が所定値より低いと判定され、速度判定部22によって速度成分が所定値より低いと判定された場合には、車両4の移動量Zに基づいて、物体Hと車両4との相対距離Z2を算出する相対距離算出部23と、画像情報から物体Hの方位情報Y2を取得し、方位情報Y2及び相対距離Z2に基づいて物体Hの位置を推定する位置推定部24とを備えることで、画像センサ31で入力した画像情報を用いて、物体Hの位置情報を推定することができる。
(もっと読む)
車幅検出方法及び装置、車両制御装置
【課題】アンテナを大型化することなく、レーダからの検出結果に基づいて車幅を検出できるようにし、更には、その車幅を利用した車両制御の信頼性を向上させる。
【解決手段】レーダ波を反射したターゲットの検出結果から、連続的に配置された路側物の位置、先行車両が位置する方向θt及び該先行車両までの距離Rt、路側物によって生じる先行車両の虚像が位置する方向θi及び該虚像までの距離Riを抽出する。更に、路側物の位置から自車両の進行方向に対する路側物の配置角度ψを求めると共に、虚像の方向θiに位置する路側物までの距離Rwを求め、次式に従って、車幅Wを算出する。
W=2{Rw×sinθi+Rt×sinθt−(Ri−Rw)×sin(θi+2ψ)}
(もっと読む)
コード表示装置
【課題】 現在位置を示すコードを、移動中に手軽に表示することができるコード表示装置を提供する。
【解決手段】 コード表示装置であるレーダ探知機1は、レーダ監視のため、ソーラーパネル28aと充電電池とを備えていて、常時電力を供給できるように構成されている。そのため、このレーダ探知機1では、現在位置を常時特定することができ、しかも、その常時特定可能な現在位置情報を示すバーコードを液晶モニタ24に表示することが、いつでもすばやくできる。従って、このレーダ探知機1を用いれば、事故など必要なときにすばやく現在位置情報を含むバーコードを提示することができるので、事故など、現在位置を正確に警察等に伝えたいとき、カメラ付き携帯電話に備えられたカメラを利用してバーコードを読み込むことで、警察等に現在位置を正確に伝えることができる。
(もっと読む)
移動物体検出装置および自律移動物体
【課題】混雑環境下での移動物体の精度よいトラッキングが行える移動物体検出装置および移動ロボットを提供すること。
【解決手段】空間の混雑度を測定してトラッキングに利用するもので、方向成分では、混雑度が低ければレーザレンジセンサの計測値を重視し、混雑度が高くなると画像処理結果を重視したセンサフュージョンを行い、得られた移動物体推定方向に対してレーザレンジセンサの計測結果から距離を求める。
(もっと読む)
121 - 140 / 296
[ Back to top ]