
Fターム[5J070BD08]の内容
レーダ方式及びその細部 (42,132) | 組合せ (788) | レーダと光学装置 (296)
Fターム[5J070BD08]に分類される特許
41 - 60 / 296
物体検出装置
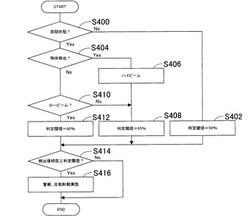
【課題】夜間または夜間に相当する暗さにおいて物体の誤検出を低減する物体検出装置を提供する。
【解決手段】夜間状態ではない場合(S400:No)、物体検出装置は、判定閾値を50%に設定する(S402)。夜間状態の場合(S400:Yes)、物体検出装置は、先行車両および対向車両を除き車両前方の物体を検出すると(S404:Yes)、前照灯をハイビームにするよう指令し(S406)、判定閾値を65%に設定する(S408)。物体を検出しなかった場合(S404:No)、物体検出装置は、前照灯がハイビームであれば(S410:No)、判定閾値を65%に設定し(S408)、前照灯がロービームであれば(S410:Yes)、判定閾値を80%に設定する(S412)。物体検出装置は、カメラとレーダとを合わせた検出信頼度が判定閾値以上であれば(S414:Yes)、警報および自動制動の少なくとも一方を指令する(S416)。
(もっと読む)
レーダ装置

【課題】受信信号の組合せの問題を解き複数目標それぞれについて高精度な測位、測速処理を実現するレーダ装置を提供する。
【解決手段】電波の放射を行う送信部100と、異なる観測点に位置し前記送信部の放射電波の複数の目標での反射電波をそれぞれ受信し、各目標に関する受信時刻とドップラ周波数を観測するための時刻・ドップラ周波数用センサTDSおよび各目標の方位を観測するための測角センサASをそれぞれ有する複数の受信部200,300と、前記各受信部で観測された受信時刻、ドップラ周波数および測角値から目標の位置ベクトルおよび速度ベクトルを推定して前記複数目標の位置と速度を求める第1の手段を含む測位・測速演算部Cと、を備えた。
(もっと読む)
車両の周辺監視装置
【課題】レーダデータと赤外線カメラデータの同期ずれを補正する。
【解決手段】車両の周辺の物体を検出するレーダと、車両の周辺の画像を撮像するカメラと、を備える車両周辺監視装置において、レーダが検出した物体の位置に対応する、カメラが撮像した対応画像上の所定領域を特定して当該所定領域内の前記物体を特定する手段とを備え、特定された対応画像上の所定領域の移動量の時間変化と、カメラが撮像した画像上での所定物体の移動量の時間変化との位相ずれ量を算出する手段と、位相ずれ量がゼロになるように、レーダまたはカメラの出力信号の位相補正をおこなう位相補正手段と、を有する。
(もっと読む)
車載レーダ装置の取り付け角度調整のための支援装置及び車載レーダ装置の取り付け角度調整方法
【課題】車載レーダ装置の取り付け角度調整のための支援装置であって、高い精度で軸調整を行う。
【解決手段】レーザ装置2と、ターゲット面30a,30bを含む被照射部材3a,3bと、を備えており、前記被照射部材3a,3bは、車両の左右方向の少なくとも一方に配置され、前記レーザ装置2は、放射したレーザ光が前記被照射部材3a,3bのターゲット面30a,30bに照射されるように前記車載レーダ装置100に取り付けられていることを特徴とする、車載レーダ装置100の取り付け角度調整のための支援装置及びこれを用いた方法が提供される。
(もっと読む)
物体検出装置
【課題】簡易な方法で、自車両に搭載された検出装置の検出方向軸のズレの補正を自車両の走路環境に応じて行うことのできる物体検出装置を提供する。
【解決手段】物体検出装置は、上記車両の車両情報を取得する車両情報取得手段と、上記車両情報を用いて上記車両の進行方向を算出する進行方向算出手段と、上記進行方向と一致する方向に上記検出手段の検出方向を補正する補正手段と、道路情報および上記車両の位置情報を含むナビゲーション情報を取得するナビゲーション情報取得手段と、当該ナビゲーション情報に基づき上記車両の位置が予め定められた条件を満たす場合、上記補正手段が行う上記補正を禁止する禁止手段とを備える。
(もっと読む)
監視システム
【課題】監視エリア内に存在する物体をより精度高く検出でき、かつ無線通信媒体を有する物体については各物体の具体的内容をより正確に把握し得る監視システムを提供する。
【解決手段】監視システム1は、レーザセンサ100と無線タグリーダ10とを備えており、レーザセンサ100には、レーザ光走査手段と、レーザ光が物体にて反射した反射光を受光する受光手段と、受光手段による受光結果に基づいて物体の方位を検出する検出手段とが設けられている。また、無線タグリーダ10には、可変指向性アンテナ14と、可変指向性アンテナ14の指向性を制御する指向性制御手段と、可変指向性アンテナ14を介して送受信される電波を媒介として無線通信媒体と無線通信を行う無線通信手段とが設けられている。そして、指向性制御手段は、レーザセンサ100での物体の検出結果に基づいて可変指向性アンテナ14の指向性を制御している。
(もっと読む)
距離測定装置及び飛翔体位置測定装置
【課題】 鳥類等の飛翔体までの距離及び位置を簡易に測定する。
【解決手段】 レーザー距離計10の接眼レンズ11にリレーレンズ20を介してビデオカメラ30を装着した構成であり、レーザー距離計10の接眼レンズ11に表示される飛翔体の画像をビデオカメラ30のモニタ画面31に表示させることができる。従って、観測者は、レーザー距離計10の接眼レンズ11をのぞき込み、アイポイント位置を保ちながらレーザーを照射する必要はなく、ビデオカメラ30のモニタ画面31を見ながら、レーザー距離計10を操作して飛翔体を追尾でき、飛翔体を追尾しながらのレーザー照射作業が容易となる。
(もっと読む)
車両検知装置および車両検知システム
【課題】レーダにより検知された車両が走行している車線を判別する。
【解決手段】車両検知装置は、複数の車線の各々に設置され、設置車線に隣接する車線を検知範囲に含むレーダからの情報を用いて車両を検知する。車両検知装置は、取得部、観測レーダ特定部、および、判定部を備える。取得部は、各レーダから、検知された対象物と対象物を検知したレーダの間の距離を表す検知距離、および、対象物の検知時刻を取得する。観測レーダ特定部は、第1のレーダにより検知された第1の対象物の検知距離と、第1のレーダの設置車線に隣接する車線に設置されている第2のレーダにより検出された第2の対象物の検知距離のうち、最も短い距離を観測した距離観測レーダを特定する。判定部は、第1の対象物と第2の対象物の間の距離が第1の閾値以下の場合に、距離観測レーダが設置されている車線を車両が走行していると判定する。
(もっと読む)
物標認識装置
【課題】レーダがオフセット搭載されている場合に、自車両に接近する物標が衝突しないと誤判断するのを防止して物標検出精度を向上する。
【解決手段】衝突判定回避処理部8により、自車両1と物標200との距離がレーダ5の水平方向の検知角と搭載位置のオフセット量とに基づいて設定された所定距離以内になったか否かを判定し、所定距離以内に物標200が接近したときに、物標200が近づくにつれて略自車両1の車幅に設定される衝突判定領域を前記検知角に応じてレーダ5の搭載位置側へ拡大修正する。
(もっと読む)
位置推定装置およびプログラム
【課題】無線信号を送信する送信装置の位置を高精度で推定することのできる位置推定装置およびプログラムを得る。
【解決手段】入館管理装置20により、RFIDタグ52の位置を送信された無線信号に基づいて推定し、かつ当該推定対象とする領域を撮影するカメラ40によって得られた画像情報に基づいて前記領域に存在する人の位置を導出し、少なくとも推定したRFIDタグ52の位置を入力情報とし、補正後のRFIDタグ52の位置を示す物理量を出力情報とし、当該出力情報の正解情報を用いた学習機能を有するニューラル・ネットワークにより得られた物理量を用いて、推定したRFIDタグ52の位置を補正する一方、位置の推定対象としたRFIDタグ52の所持者が、位置の導出対象とした人とみなされる予め定められた条件を満足した場合に、導出した前記人の位置を示す物理量を前記正解情報としてニューラル・ネットワークを学習させる。
(もっと読む)
測位装置
【課題】測位エリア内の無線タグの数の増加に伴う測位精度の低下を抑制すること。
【解決手段】測位装置100は、タグ測位部102と、カメラ測位部105と、タグ測位部102の測位結果とカメラ測位部105の測位結果を統合するフュージョン部103と、測位エリアAR0内の無線タグの数が所定数以上になった場合に一部の無線タグとの通信を抑制するタグ抑制部108と、を有する。タグ抑制部108は、カメラ測位部105による測位が可能な位置に存在する無線タグとの通信を抑制する。
(もっと読む)
車両制御装置
【課題】より確実に先先行車を検出してロストを防止する確率を高めることにより、他車両の位置に応じた処理における利便性を高めることができる車両制御装置を提供する。
【解決手段】車両制御装置10は、自車両Cの進行方向に照射したミリ波の先先行車両Bからの反射波を受信して得られる先先行車両Bの位置情報に基づいて自車両Cの速度制御を行なう車両制御装置において、先先行車両Bを検出できていないロスト状態が発生中であるか否かを検知するロスト検知部1と、ロスト検知部1によりロスト状態が発生中であると検知された場合に、自車両Cの周囲に反射物が存在するか否かを判定する反射判定部2と、反射判定部2により反射物が存在すると判定された場合に、自車両Cの走行軌道を反射物方向へ変更させる車両制御部3と、を備える。
(もっと読む)
車載レーダ点検装置とその方法
【課題】ガソリンスタンドや立体駐車場などにおいて運転者が簡易に車載レーダの送信あるいは受信方向のずれ及び動作を点検できる車載レーダ点検装置とその方法を提供する。
【解決手段】本発明は、車両1を回転する車両回転台8によって、リトロリフレクタ2と車載レーダ12,13との相対的な方向を変化させ、それぞれ車両の前面、後方、左右斜め前方、左右斜め後方及び左右側方のうちの複数カ所に取り付けられた車載レーダの動作点検をする車載レーダ点検装置とその方法である。
(もっと読む)
建物内の検知対象の位置検知、行動認知システム
【課題】 建物内で移動する検知対象(人、物)の位置検知、行動認知が行え、必要に応じて検知対象に対して情報アシストを行えるシステムを提供する。
【解決手段】 天井版を格子状に取り付けたグリッド天井5を有する建物のフロア1内において、フロア1全体を検知範囲とする広域センサ15と、区画したゾーン間を通過する箇所に配置されたゲートセンサ16と、各ゾーン内の詳細検知可能にゾーン内に配置されたスポットセンサ17からなる検知手段を、グリッド天井5の天井板ごとに設ける。この検知手段を有する天井板を、グリッド天井5のレイアウトに応じて所定位置に配置する。各位置に配置された検知手段15,16,17により、検知対象者あるいは検知対象物の位置検知や行動認知を、段階的な精度で行える。さらに必要な情報を検知対象者に伝えることもできる。
(もっと読む)
物体検出装置
【課題】カメラとレーダ等の複数のセンサを用いて物体を検出する物体検出装置において、複数のセンサから得られる情報を利用して検出精度を向上する。
【解決手段】光、電波、超音波の少なくとも一つの信号により物体を計測する少なくとも二つの計測部と、該計測部から得られる出力信号を処理する処理部2を具備する物体検出装置1において、前記少なくとも二つの計測部は、少なくとも二つの互いに異なる計測原理で構成される計測部であって、前記複数の計測部から得られる複数の出力信号を、共通の処理系のメモリに格納する取込手段を具備し、前記出力信号を、前記複数の計測部から得られる出力信号を共通の処理部2で処理する。
(もっと読む)
対象物を位置特定するための方法およびシステム
本文書は対象物の位置特定のための方法およびシステムを説明する。対象物(1)は少なくとも一つの第1のタイプの信号を照射され、前記信号の反応を探知する方法を踏まえ。本発明によれば、前記対象物(1)は前記第1のタイプの信号を後方散乱するトランスポンダ(2,3)を取り付けられ、前記トランスポンダ(2,3)は、前記トランスポンダ(2,3)の後方散乱周波数に影響を与える第2のタイプの信号でも照射され、前記トランスポンダ(2,3)からの後方散乱信号は対象物を位置特定するために探知される (もっと読む)
画像表示装置
【課題】電波の発射源を可視化する周波数領域を変更する際に、その操作性を向上させることが可能な画像表示装置を提供する。
【解決手段】スペクトラム波形表示画面におけるフィルタリングエリアを、GUIで使用されるユーザインタフェース部により画面上で操作する。そして、この画面上の操作により、フィルタリングエリアにより選択された周波数帯域が変更された場合、変更後の合成画像を発射源表示画面に表示する。
(もっと読む)
ハンドヘルド測地デバイスによるグラフィクス支援遠隔位置測定
【課題】付加的な設置機器を使用せずに、位置を計測することが可能である測地デバイスを提供すること。
【解決手段】関心のある地点の位置を決定する装置であって、複数の衛星からの位置データを受信する少なくとも1つのアンテナと、該少なくとも1つのアンテナに結合される少なくとも1つの受信機と、画像データを獲得する画像化回路であって、該画像化回路は、光学センサと光軸とを含む、画像化回路と、配向データを獲得する配向回路と、該画像データおよび該配向データの表現を表示して、該装置を位置決定する際に使用者を支援するディスプレイと、該位置データ、該画像データおよび該配向データに少なくとも基づいて、該関心のある地点の該位置を決定する位置決定回路とを含む、装置。
(もっと読む)
位置検出装置、位置検出システム及び無線通信システム
【課題】移動体の現在位置を、複雑な計算を伴わずに正確に検出でき、位置検出のための情報を登録する必要のない位置検出装置、位置検出システム及び無線通信システムを提供する。
【解決手段】移動体が移動する移動路に沿って等間隔に順に配置される共振タグに専用のアンテナと、このアンテナを介して共振タグを読み取る共振タグ読取部と、共振タグ読取部により読み取った共振タグの数に基づいて移動体の位置を検出する位置検出部と、を備える。
(もっと読む)
位置検出装置、位置検出システム及び無線通信システム
【課題】移動体の現在位置を、複雑な計算を伴わずに正確に検出でき、位置検出のための情報を登録する必要のない位置検出装置、位置検出システム及び無線通信システムを提供する。
【解決手段】隣り合うものの共振周波数が異なるように移動体が移動する移動路に沿って等間隔に順に配置される複数種類の共振タグのそれぞれに専用のアンテナと、このアンテナの各々を介して共振タグを読み取る共振タグ読取部と、共振タグ読取部により読み取った共振タグの数に基づいて移動体の位置を検出する位置検出部と、を備える。
(もっと読む)
41 - 60 / 296
[ Back to top ]