
Fターム[5J070BD08]の内容
レーダ方式及びその細部 (42,132) | 組合せ (788) | レーダと光学装置 (296)
Fターム[5J070BD08]に分類される特許
141 - 160 / 296
協調型飛翔体システム
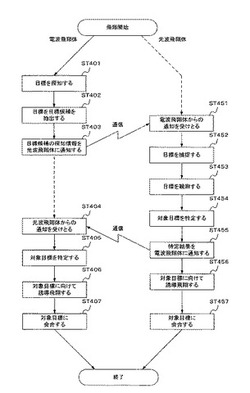
【課題】同時に複数で飛来する目標の中から対象目標を特定した上で、これら対象目標に対して効果的に対処することのできる協調型飛翔体システムを得る。
【解決手段】電波により目標を検知する電波飛翔体と、光波により目標を検知する光波飛翔体とが互いに通信可能な範囲を飛翔しながら、電波飛翔体は、探知した目標の中から対処の対象となる目標候補を抽出して光波飛翔体に通知し、光波飛翔体は、この通知に基づき目標候補を詳細に観測して対処の優先度を評価した上で自身の対処すべき目標を特定し、この目標に向けて誘導飛翔する。一方、電波飛翔体も、光波飛翔体による目標候補に対する評価結果の通知を受けて自身の対処すべき目標を特定し、この目標に向けて誘導飛翔する。
(もっと読む)
車載装置

【課題】レーダ装置の保護と利用とを適切にバランスさせた車載装置を提供すること。
【解決手段】前照灯と該前照灯のケース内に配設されたレーダ装置とを含む車載装置に、レーダ装置の温度を検出する温度検出手段と、この温度検出手段により検出されたレーダ装置の温度に応じて、該レーダ装置についてのレーダ制御車速を変更するレーダ制御車速変更手段と、を備える。レーダ制御車速変更手段は、前照灯がハイビームにセットされているときとロービームにセットされているときとでレーダ制御車速を異なる速度とする。
(もっと読む)
周辺監視センサ
【課題】物体の相対位置、相対速度、物体形状などを確実にセンシングする周辺監視センサを得る。
【解決手段】周辺監視センサ1は、ミリ波レーダ2、画像センサ3、信号処理部4を具備し、各センサが検出したデータについてエリア分けを行い、所定のエリア内に存在する物体(ターゲット)については、両センサが取得した情報に基づいて、物体に関する情報を作成する。ミリ波レーダは、遠距離の物体の距離、速度の測定が得意で、画像センサは、物体の幅、角度の測定が得意であるので、それぞれの得意のデータを組み合わせることにより、正確な情報を得ることができる。信号処理部4は、ミリ波レーダが検知した物体の存在場所に画像センサが検知した物体情報を組み合わせて物体面であることを判断する。
(もっと読む)
動態監視システム
【課題】 狭いスペースにおける移動体の位置把握を細かく分けて認識することが難しく、セキュリティ面での不安もあり、狭い空間範囲においても人などの移動体が、いつ、どの方向に移動したかといった位置把握を可能とする。
【解決手段】 移動体が通過するゲート11の通過方向に第1赤外線センサ12並びに第2赤外線センサ13を設置し、第1並びに第2センサは、移動体がゲートを通過するに伴って第1センサのみが作動し、その後第1並びに第2センサの両方が作動し、その後第2センサのみが作動するようにゲートの位置に設置され、移動体が携行するRFIDタグ15からのID信号並びに第1・第2センサからの出力信号に基づいて移動体の動態を監視する。
(もっと読む)
物体検出装置
【課題】画像データに基づく物体の大きさ情報の信頼性を向上できる物体検出装置を提供する。
【解決手段】物体検出装置としての衝突軽減装置1は、ミリ波レーダ2と、ステレオカメラ3と、ミリ波レーダ2からの信号を基に自車両に対する物体の位置情報(レーダ物標)を取得すると共に、ステレオカメラ3からのステレオ画像データを基に物体の大きさ情報(ステレオ画像物標)を取得し、レーダ物標の各情報およびステレオ画像物標の各情報に基づいて物体の位置及び大きさに関する物体情報(フュージョン物標)を生成する衝突軽減ECU8とを備える。衝突軽減ECU8は、レーダ物標の横位置の時間変化率が所定の閾値より大きい場合には、フュージョン物標を生成しないか、或いはステレオ画像物標に設定された大きさ情報の少なくとも一部をフュージョン物標から除外する。
(もっと読む)
追尾照準装置
【課題】画像処理に要する時間が多大になることによって発生する照準方向のずれ量を除去して高精度に目標物を追尾できる追尾照準装置。
【解決手段】照準軸が目標物に向くように照準方向を合わせて光を照射する照準器1と、照準器から光が照射された目標物からの反射光を撮像面に結像させることにより該目標物を撮像する撮像器2と、撮像器によって撮像された画像に基づき撮像器および照準器の指向方向を算出する制御器5と、制御器によって算出された指向方向に照準器および撮像器を一体として駆動して位置決めを行う位置決め機構4とを備えた追尾照準装置において、制御器は、指向方向を算出する間に目標物の相対位置が変化することによる照準方向のずれ量を、現在の目標物の位置および直前の目標物の位置に基づき補正量として算出し、該算出した補正量に基づき照準器の照準方向を補正する照準制御部13を備える。
(もっと読む)
感知可能な動き検出器
幾らかの実施形態では、第1の調節可能なレンズを有する第1のセンサと、第2の調節可能なレンズを有する第2のセンサと、を備える装置が開示される。コントローラは、第1のセンサおよび第2のセンサに連結される。コントローラは、第1モードにおいて第1のセンサおよび第2のセンサを独立して動作させ、第2モードにおいて第1の動きセンサおよび2の動きセンサを相互依存させて動作させる。 (もっと読む)
車両周辺監視装置
【課題】画像検出手段を備える車両周辺監視装置において、自車両に対する物体の相対移動ベクトルの算出精度を向上する。
【解決手段】車両周辺監視装置1は、自車両に対する物体の相対移動ベクトルを検出する装置であって、自車両に対する物体の距離情報および横位置情報を生成するミリ波レーダ2と、物体の左端横位置情報及び右端横位置情報を生成するステレオカメラ3と、距離情報、左端横位置情報、及び右端横位置情報を基に、自車両に対する物体の相対移動ベクトルを算出するECU4とを備える。ECU4は、左端横位置情報及び右端横位置情報のそれぞれに重み付けを行って相対移動ベクトルを算出するとともに、重み付けの際に、左端横位置情報及び右端横位置情報のうち画像の中心に近い側の位置情報の重みを遠い側より大きくする。
(もっと読む)
物体位置特定システム、物体位置特定方法、物体位置算出装置、及びコンピュータプログラム
【課題】複数の物体が混在する室内環境であっても、対象となる物体の位置を精度良く特定することができる物体位置特定システム、物体位置特定方法、物体位置算出装置、及びコンピュータプログラムを提供する。
【解決手段】センサが移動状態である旨を検知した時刻情報及び識別情報を外部へ送信することが可能な電子タグ、人間の存在する位置に関する位置情報を外部へ送信することが可能な人間位置特定手段、及び電子タグを装着した物体の位置を算出する物体位置算出装置を備える。物体位置算出装置は、人間の位置変化の加速度を算出し、算出した加速度の変化に応じて人間が移動している時間帯を推定する。センサが移動状態と検知した時間帯に人間が移動している時間帯が含まれる場合、移動状態と検知した時間帯の最終の時刻での人間の位置情報を、電子タグを装着した物体の位置情報として記憶する。
(もっと読む)
アクティブレーダシステム
車両用の例としてレーダシステムは、レーダビームを生成するように動作可能なレーダアンテナと、レーダビームが通る、少なくとも1枚の能動レンズを含むレンズ組立体とを備える。レーダビームは、能動レンズを使用して調整可能な視野を有する。いくつかの例では、能動レンズはメタマテリアルを含み、メタマテリアルは、調整可能な負の率等の調整可能な属性を有し、視野は、メタマテリアルの調整可能な属性を使用して調整可能である。  (もっと読む)
(もっと読む)
表示制御装置、方法およびプログラム
【課題】ドライバーが周囲に存在する物体の状況を認知しやすい表示制御装置を提供する。
【解決手段】車両周囲を撮像する撮像部と、音波、電波、またはレーザを照射し反射波を受信することにより、あるいは、上記撮像部からの撮像画像を処理することにより、周囲の障害物の有無、あるいは、距離や方向を検知する物体検知センサと、物体検知センサの制御値を設定し検知領域を所定の条件に応じて変化させる検知領域判断部と、検知領域判断部の制御値に基づき決定される物体検知センサの検知領域を車両周囲を撮像した撮像画像に重畳して表示させ、運転者に検知領域の情報を提供する表示制御部とを備える構成とする。
(もっと読む)
個体管理システム
【課題】無線通信装置を利用した自動認識技術を用いて、物品を管理するための個体管理システムを提供する。
【解決手段】管理対象物には個体管理装置が付され、個体識別装置は該個体管理装置との無線通信が可能であり、個体情報管理装置は個体識別装置との通信が可能な構成を有する。個体管理装置はセンサ等の検知部を有し、個体識別装置は個体管理装置との距離を算出する位置解析部を有する。個体管理装置と個体識別装置の間の距離、及び個体管理装置が有する検知部からの情報が個体識別装置に送られ、システムの利用者が個体管理装置の位置を正確に特定することが可能になる。
(もっと読む)
車両用物体検出装置
【課題】処理負荷を低減し、かつ、情報の欠落の少ない変倍処理を実現する車両用物体検出装置を提供することにある。
【解決手段】車両5周辺の所定の領域にある物体までの距離及び方位を測定するミリ波レーダ10、車両5周辺の所定の領域を含む範囲を撮影するカメラ20及びミリ波レーダ10で測定した物体までの距離及び方位に基づいてカメラ20で撮影した画像から物体を検出する画像処理装置30を備える。そして、画像処理装置30では、第1変倍処理部33で、検出した物体の画像の大きさを縮小率50%で4段階に変化させた4つの画像を作成する変倍処理を行い、第2変倍処理部35で、第1変倍処理部33で作成した4つの画像を、ミリ波レーダ10から得られた物体までの距離に応じて選択し、選択した画像から必要な縮小率まで補間して変化させることにより、物体の画像を得る。
(もっと読む)
対象物検出装置
【課題】シングルビーム方式のレーダ装置を用いて車両の周囲に位置する対象物が存在するレーン位置を特定する対象物検出装置を提供する。
【解決手段】検出範囲にある対象物までの距離のみを検出可能なシングルビーム方式の右方レーダ装置4及び左方レーダ装置5を備え、各レーダ装置4、5のパラメータ情報と、車両2の現在位置情報と、車両2が走行する道路の道路形状情報とに基づいて、各レーダ装置4、5により特定のレーン内に位置する対象物を検出可能な対象物存在範囲70、71を算出し、検出した対象物までの距離に基づいて対象物のレーン位置を特定するように構成する。
(もっと読む)
センサ融合ナビゲーションのためのシステムおよび方法
【課題】精密なナビゲーションを実施できるナビゲーション・システムを提供する。
【解決手段】ナビゲーション・システムは、複数のナビゲーション・センサを備え、複数のナビゲーション・センサのそれぞれは、剛体の複数の状態(剛体状態)のうちの少なくとも1つについてのデータを提供するように構成され、それによって複数の剛体状態のそれぞれについてのデータが複数のナビゲーション・センサのうちの1または複数のものによって提供されるようにし、複数のナビゲーションセンサのうちの1つがステレオ・ビジョン・センサであり、また、ナビゲーション・システムは、複数のナビゲーション・センサに結合された処理装置を備え、処理装置は、複数の剛体状態のそれぞれについてのデータを統合して、複数の剛体状態のそれぞれについての組合せ状態推定を得るように構成される。
(もっと読む)
物体検知装置
【課題】広範囲に存在する物体を検知し、複数の物体間の距離を求めることが可能な、物体検知装置1を提供する。
【解決手段】電磁波を走査し物体からの反射波を受信して物体を検知するレーダ10と、レーダ10の向きを変化させるモータ10aと、画像を撮影するカメラ20と、カメラ20で撮影した画像を表示するディスプレイ30と、ディスプレイ30により表示された画像上でレーダ10の走査範囲を設定するタッチパネル30aと、設定された走査範囲に基づいてレーダ10を走査する制御手段40と、を備える構成とした。
(もっと読む)
空港面監視システムおよび空港面監視方法
【課題】空港面に存在する目標の誤検出を減少し、誤ターゲットの表示を抑制できる空港面監視システムを提供する。
【解決手段】ASDE10を用いたASDE追尾系統とMLAT20を用いたMLAT追尾系統を備え、MLAT追尾系統は、MLAT20が出力する目標位置検出情報に基づいて目標近傍の領域に対してはASDE追尾系統のビデオレベル判定部13のスレッショルドレベルを下げ、目標近傍以外の領域に対してはビデオレベル判定部13のスレッショルドレベルを上げるASDEビデオレベル判定用マップ情報205をビデオレベル判定部13に出力するスレッショルドMAP作成処理部23を有している。
(もっと読む)
車両用障害物検知装置
【課題】車両のフロントエンド部分に配置されたレーダユニットの基準検知軸の方向が所期方向からずれている場合に、その基準検知軸を自動的に確実に補正し調整することができる、車両用障害物検知装置を提供する。
【解決手段】カメラユニット3で撮像された車両前方の特定障害物OSの画像情報に基づいて、その特定障害物OSの位置を検知し、この検知された特定障害物OSの位置とレーダユニット2で検知された同特定障害物OSの位置が一致するか否か判定し、その判定を受けて特定障害物OSの位置が一致しない場合に一致するように、レーダユニット2の基準検知軸BArを自動的に補正する。
(もっと読む)
物体検出装置、および車車間通信システム
【課題】車両の周囲に存在する物体を検出する物体検出装置において、路側物と二輪車等の車両とを精度よく識別できるようにする。
【解決手段】支援制御ECUは、車両検出処理において、複数のサイドカメラによる撮像画像に基づく画像処理と、複数のソナーによる検出タイミングの差分とによって検出した物体の各移動速度を比較することにより、物体が車両であるか否かを判定する。即ち、別々に検出した物体の移動速度を比較することによって、物体の移動速度を高精度に求め、この物体の移動速度に基づいて物体が車両であるか路側物であるかを識別できるようにしている。従って、路側物の形状が車両の形状と似ている場合であっても、この物体が路側物であるか車両であるかを誤判定することなく精度よく識別することができる。
(もっと読む)
背景画像作成装置
【課題】本発明は自動車等の移動体を検出する際使用する、移動体検出領域の背景画像を作成する背景画像作成装置に関し、特に車両で渋滞した道路や停止時間が長い車両が存在する場合でも、精度のよい背景画像の作成を行うことができる背景画像作成装置を提供するものである。
【解決手段】本発明はレーダ4によって検出領域1の情報を取得し、移動体検出部5に当該情報を送り、検出領域1上に存在する移動体2の位置を検出し、移動体2周辺の一定範囲を除く領域を非存在領域特定部6によって特定する。また、この時の検出領域1の情報を取得し、背景画像生成部7によって移動体2を含まない領域を背景画像として精度よく生成する。その後、カメラ3によって検出領域1の情報を取得し、上記生成の背景画像と差分処理部9において両画像の差分を検出することによって移動体2の正確な位置を検出することができる。
(もっと読む)
141 - 160 / 296
[ Back to top ]