
Fターム[5J070BD08]の内容
レーダ方式及びその細部 (42,132) | 組合せ (788) | レーダと光学装置 (296)
Fターム[5J070BD08]に分類される特許
61 - 80 / 296
物体検出装置
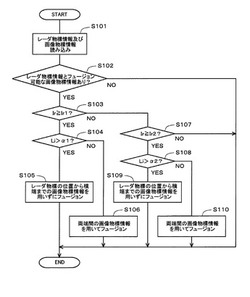
【課題】レーダによって取得されるレーダ物標情報とカメラによって取得される画像物標情報とをフュージョンさせることで物体を検出する物体検出装置において、物体の検出精度をより向上させる。
【解決手段】レーダによって認識された物標の位置から、レーダの受信波の強度に応じて設定された所定の横幅の範囲内にある画像物標情報のみを用いて、レーダ物標情報と画像物標情報とをフュージョンさせる。
(もっと読む)
物体検出システム
【課題】レーダー及び立体視センサーを含む物体検出システムを提供する。
【解決手段】物体検出システムは、レーダー信号が送信される少なくとも一つの開口及び反射したレーダー信号が受信される少なくとも一つの開口を備えるレーダーシステムを含む。検出システムは、第1のセンサー及び第2のセンサーを含む立体視システムも含む。第1のセンサー及び第2のセンサーは、オフセットにより分離される。立体視システムは、単一のアセンブリを形成するためにレーダーシステムに取り付けられる。レーダーシステムは、第1のセンサーと第2のセンサーとの間のオフセット内に設置される。
(もっと読む)
物体検出装置及び運転支援装置

【課題】警報対象とはならない物体に対して警報が行なわれることを抑制する。
【解決手段】レーダで自車両の後側方の車両を検出する物体検出装置において、自車両の進行方向に複数の車線を有する道路を走行するときに、自車両が走行している車線を取得する取得手段と、レーダにより検出される物標を車両として認識するときの条件を、取得手段により取得される車線に基づいて変更する認識条件変更手段と、を備える。
(もっと読む)
舗装の内部損傷箇所の非破壊調査方法
【課題】舗装の内部損傷箇所を非破壊で迅速に定量調査できる方法を提供する。
【解決手段】上記課題は、舗装路面Rにおける検出対象領域の全体にわたり所定の間隔で、電磁波レーダーkによる探査を行い、各反射波検出位置40における反射波データ50を取得し、この反射波データ50に基づき、各反射波検出位置40の所定深さにおける反射波強度55を取得し、この反射波強度50が所定の強度しきい値以上となる反射波検出位置40を内部損傷箇所とし、且つ反射波強度が所定の強度しきい値未満となる反射波検出位置40を非内部損傷箇所として、検出対象領域に占める内部損傷箇所の割合を定量化する、ことを特徴とする舗装の内部損傷箇所の非破壊調査方法により解決される。
(もっと読む)
レーダ装置
【課題】物体の左右方向及び上下方向の少なくとも一方の位置を正確に検出することの可能なレーダ装置の提供。
【解決手段】レーダ装置100は、左右方向に配列され、少なくとも一部が上下方向にずれて配設された複数(ここでは、3個)の素子アンテナ(21、22、23)を有する受信アンテナ2と、位置検出ECU(5)と、を備える。また、位置検出ECU(5)は、前記複数の素子アンテナ(21、22、23)で受信された受信信号の位相差に基づいて、物体TGの上下方向位置P1を検出する第1位置検出部53と、上下方向位置P1の履歴に基づいて、該上下方向位置P1を補正して、補正後の上下方向位置である第1補正位置P1Aを求める第1位置補正部(54)と、を備える。
【選択図】図2 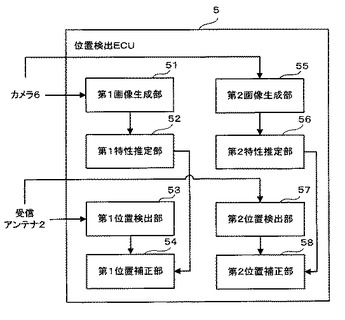 (もっと読む)
(もっと読む)
物体検出装置、情報処理方法、および、情報処理システム
【課題】カメラで撮影した画像内の物体の種類を判定する場合の電子制御装置の処理負荷を軽減する技術を提供する。
【解決手段】レーダ装置により検出したレーダ情報に基づいて、物体の種類を予測する。その予測した物体の種類をもとにカメラで撮影した1フレームの画像の所定の画像範囲を切り出して、電子制御装置により物体の種類判定を行う。これにより電子処理装置の画像による物体の種類判定の処理負荷が軽減される。
(もっと読む)
電波発射源可視化装置
【課題】電波発射源可視化装置において、特に近距離の電波発射源をカメラ画像中から特定する際にも、良好な位置精度を維持できる電波発射源可視化装置を得る。
【解決手段】アレイアンテナ部11の中心軸に沿って前方にレーザ光を照射し、このレーザ光の照射された位置をカメラ画像の撮像視野の中心となるようにカメラ部13の撮像方向を調整して両者の軸合わせを行った後、電波到来方向を推定した2次元の波源画像とカメラ画像とを重ね合わせて、電波発射源可視化画像を得る。
(もっと読む)
マルチラテレーション装置及びこれを用いた空港面監視システム
【課題】 空港面監視システム内の目標検出装置であるMLAT装置は、複数の受信機2で受信しその時間差から目標(航空機)の位置を特定する。このため受信機数が多いと、受信機の組合せ数により多数の検出位置解が発生し、特に1つ以上の検出位置解がマルチパス等により大きく外れると検出位置がばらついてしまう。
【解決手段】航空機5が通過予定である経路のセンターライン位置情報を利用するためセンターラインDB14に蓄積する。複数の検出位置解から検出位置を特定する際に、基準となるセンターラインから各検出位置解までの距離に応じて重み付けを行ない位置座標を特定する。この結果検出位置のばらつきが押さえられ、検出位置精度が向上する。また、他の目標検出装置が検出した位置座標と統合する以前に早い段階で、MLAT装置1にて検出精度が向上するので、管制官の負担を軽減した空港面監視システムを構築できる。
(もっと読む)
信号処理装置、及びレーダ装置
【課題】
車載レーダ装置の受信感度の低下を正確かつ迅速に検出する。
【解決手段】
車両に搭載されるとともに前記車両周囲に送信信号を送信して物標に反射された前記送信信号を受信するレーダ送受信機の信号処理装置において、前記車両に搭載された画像認識手段が前記物標の撮像画像に基づき前記物標の種別と距離とを検出し、受信感度監視手段が受信信号のレベルまたは前記受信信号から生成される信号のレベルが前記物標の距離と種別とに対応づけられた基準レベル以上であるか否かを検出するので、受信信号や受信信号から生成される信号のレベルに適切な基準レベルを適用できる。よって、受信感度の低下を正確かつ迅速に検出できる。
(もっと読む)
信号処理装置、及びレーダ装置
【課題】 レーダ軸のずれを精度よく検出する。
【解決手段】
車両に搭載されるとともに静止物標に反射されたレーダ信号を受信するレーダ送受信機の信号処理装置は、前記静止物標における前記レーダ信号の反射点を前記受信したレーダ信号に基づき検出する物標検出手段と、前記車両に搭載された画像認識装置が前記静止物標の近傍に他の物標が存在しないことを前記静止物標を含む撮像画像に基づき検出したときに、前記反射点の分布方向と基準方向との差が基準値以上か否かを検出する軸ずれ検出手段とを有するので、軸ずれ検出に適した状況で軸ずれ検出を行い、適さない状況での軸ずれ検出を回避できる。よって、軸ずれを精度よく検出できる。
(もっと読む)
ミリ波イメージングシステムとその撮像方法
【課題】ミリ波透視スキャナの撮像幅が狭く、隠蔽された検知対象物の形状を特定することが困難である場合に、撮像領域を拡大して視認性を向上させることができるミリ波イメージングシステムを提供する。
【解決手段】本発明は、特定の形状の光学反射板20を被測定物16の表面に長手y方向がスキャナ2の移動x方向と直交する向きにして貼り付け、スキャナ2に光学検出器30を設け、被測定物表面の光学反射板を含む線分xiに沿ってスキャナを移動させることによりビーム強度スキャン測定と光学検出器による光学強度スキャン測定とを同時に行い、スキャナの走査移動距離dを算出すると共に、光学強度スキャン測定にて光学反射板の直交方向の幅wを求め、関数関係y=f(w)に基づき直交方向の幅wより長手方向の位置yを算出し、y位置のx方向のスキャン画像を得るミリ波イメージングシステムである。
(もっと読む)
RFIDタグ感知システム及び感知用発光タグ
【課題】選択されたRFIDタグを目視で感知することが可能なRFIDタグ感知システム及び感知用発光タグの提供。
【解決手段】RFIDタグ感知システムSは、RFIDタグ1とリーダ/ライタ2と感知用発光タグ3とから構成される。感知用発光タグ3の発光用タグアンテナ30がRFIDタグ用アンテナ10との電磁結合で自タグの選択可の信号を受け取る。タグ選択感知手段が受け取った自タグの選択可の信号によりRFIDタグ1がリーダ/ライタ2により選択されたことを検知する。受光手段がリーダ/ライタ2から照射された光を受光する。光―電気変換手段が受光した光を電気エネルギーに変換する。RFIDタグ1が自タグの選択可の信号を送信したとき、発光手段を電気エネルギーを用いて発光させることができる。
(もっと読む)
車両用外界認識装置及びそれを用いた車両システム
【課題】安全性確保と処理負荷低減の両立を図ることができる車両用外界認識装置及び車両システムを提供する。
【解決手段】車両用外界認識装置100は、自車の予測進路と自車前方の検知物体の情報に基づいて自車が検知物体に衝突する危険度を演算する第1の衝突判定手段103と、検知物体が予測進路の外から予測進路内に進入するか否かを判定する第2の衝突判定手段104を有する。そして、複数の検知物体の中から、危険度が第1の閾値以上である検知物体と、予測進路内に進入すると判定された検知物体とを選択候補物体として選択し、その選択された複数の選択候補物体の中から、自車との相対距離が最小となる選択候補物体を歩行者判定要求物体として選択する物体選択手段105を有する。そして、その選択された歩行者判定要求物体に対して画像情報を用いて歩行者か否かを判定する歩行者判定手段106を有する。
(もっと読む)
障害物認識装置及び車両制御装置
【課題】車載カメラとミリ波レーダとのセンサ情報から取得するセンサ情報の組み合わせ精度を向上させて、より正確に障害物の認識をする障害物認識装置を提供する。
【解決手段】複数のセンサ情報を組み合わせて障害物の認識を行う障害物認識装置であって、障害物に関する第一パラメータ情報を取得する前方カメラ201と、障害物に関する第二パラメータ情報を取得するミリ波レーダ202と、前方カメラ201で取得した第一パラメータ情報とミリ波レーダ202で取得した第二パラメータ情報とに基づき、前方カメラ201又はミリ波レーダ202の方位角の軸ずれ量を算出し、算出された軸ずれ量に基づいて前方カメラ201又はミリ波レーダ202の軸ずれを補正する補正部203aと、軸ずれ量を記憶する記憶部203cとを備える。
(もっと読む)
車両内の運転者支援システムのためのセンサ構成
本発明は、レーダセンサ(10)とビデオカメラ(14)とを備えた、車両内の運転者支援システムのためのセンサ構成であって、レーダセンサ(10)及びビデオカメラ(14)が共通のハウジングに組み込まれる、上記センサ構成に関する。 (もっと読む)
SAR(SyntheticApertureRadar)重畳データ生成装置、SAR重畳データ再生装置、SAR重畳データ生成プログラム、SAR重畳データ再生プログラム、SAR重畳データ生成方法およびSAR重畳データ再生方法
【課題】SAR(合成開口レーダー)と光学センサとによる同時観測においてSAR画像と同じデータ量でSAR画像と光学画像とを伝送し、地上での画像再生処理においてSAR画像と光学画像とを別々に画像化できるようにすることを目的とする。
【解決手段】SAR/光学観測衛星110では、(1)SAR111と光学センサ112とにより地上の同じ地域を観測し、(2)SAR/光学伝送装置200によりSAR111の観測データと光学センサ112の観測データとを重畳させた重畳データを生成し、(3)重畳データをダウンリンクする。地上センタ120では、(4)SAR/光学再生装置300により重畳データからSAR画像と光学画像とを再生する。(2)においてSAR/光学伝送装置200は、光学センサ112で撮像した光学画像に対してSAR再生処理の逆処理をし、逆処理した光学画像を符号化して光学センサ112の観測データを生成する。
(もっと読む)
障害物検出装置
【課題】車両周辺の障害物の位置・形状及びスペースを広範囲かつ正確に検出すること。
【解決手段】アレイ状に配置された素子から送信波を送信し、障害物での反射波を各素子で受信する。その受信信号を受信した時間から障害物の距離を算出し、各素子の受信信号の位相差から障害物の方向を算出する。また、広範囲で障害物を検出するために、各素子に入力する送信信号の位相差を適宜変えて、送信波の合成指向性を制御するとともに、各素子の受信信号に乗算する係数を適宜変えて、受信波の合成指向性を制御する。特に、隣接素子間に位相差を同相、逆相交互に設定することで、指向性を狭角、広角と交互に切り替え、広範囲の障害物の位置検出を可能とする。さらに、移動しながら検出した位置情報から、車両走行経路周辺の障害物の位置・形状及びスペースの認識を可能とする。
(もっと読む)
物体識別装置
【課題】本発明は、物体の一部でセンサにより検出できない未検出領域を検出することで、物体の識別精度の向上を図ることができる物体識別装置を提供する。
【解決手段】本発明は、撮像カメラ2及びLRF3により検出された物体Aの特徴量に基づいて物体が識別対象物体であるか否かを判定する物体識別装置1において、物体Aの一部で撮像カメラ2及びLRF3によりにより検出できない未検出領域T4,T6を検出する未検出領域検出部15と、未検出領域検出部15の検出結果に基づいて、物体Aが識別対象物体であるか否かを判定する物体識別部16と、を備える。この物体識別装置1によれば、未検出領域が存在する場合に、この未検出領域を検出して区別することで、未検出領域において検出される特徴量すなわち遮蔽物等の特徴量を該物体の特徴量と誤認識することを回避し、これによって物体の識別精度を向上させることが可能となる。
(もっと読む)
車両制御装置
【課題】車両の安全を十分に確保することができる車両制御装置を提供すること。
【解決手段】本発明による車両制御装置1は、車両の前方の障害物との距離を検出する第一検出手段と、車両の右折又は左折の開始及び終了を検出する右左折検出手段5aと、車両の前方の所定領域を設定する所定領域設定手段5bと、右左折検出手段5aが車両の右折又は左折の開始を検出した場合に、第一検出手段が所定領域に指向するように、第一検出手段の車両の車体の前方に対する第一角度θ1を制御する第一角度制御手段5cとを含むことを特徴とする。
(もっと読む)
車載表示装置
【課題】ヘッドライトの点灯が必要な走行時に、安全かつ快適に車間距離の確保を運転者に促すことが可能な車載表示装置を提供する。
【解決手段】車載表示装置1では、制御部10が、各センサ及びスイッチ類2〜6からの入力情報に基づいて各種処理を実行し、ピクセルライト7を介して、自車両に対する前方側の路面上に照明光を照射し、画像デバイス8を介して、ピクセルライト7の投射領域に、安全車間距離を表す指標画像を表示する。このため、安全車間距離を表す指標画像が車両前方の道路(実像)上に表示されるため、運転者の視線が車外前方から外れずに済むと共に、運転者の焦点が実像上の指標画像に合いやすくなり、例えば夜間や夕方におけるヘッドライト6の点灯が必要な走行時に、安全かつ快適に車間距離の確保を運転者に促すことができる。
(もっと読む)
61 - 80 / 296
[ Back to top ]