
Fターム[5J070BD08]の内容
レーダ方式及びその細部 (42,132) | 組合せ (788) | レーダと光学装置 (296)
Fターム[5J070BD08]に分類される特許
101 - 120 / 296
物体検出装置

【課題】処理負荷を抑えながら、高精度に線模様を検出する物体検出装置を提供する。
【解決手段】処理部22で車両判定を行った場合に、当該車両の周囲において、カメラ1の処理部12で白線認識を行い、認識した白線の画像特徴量(彩度、色相)を抽出する。さらに、処理部12は、画像全体において、車両周囲で抽出した白線の画像特徴量に一致する画像特徴量を有する位置を検出することにより、画像内のどの位置に白線が有るかを検出する。
(もっと読む)
物体検出装置

【課題】 レーダによる検出結果と画像処理による検出結果の時間的なずれに起因する誤差の影響を低減し、物体検出精度を向上させることができる物体検出装置を提供する。
【解決手段】 物体検出装置1の物体検出部10は、レーダ検出部により検出された検出点データを参照して画像撮像部12により撮像された画像データを探索して、検出対象物体に対応する画像部分を検出する画像部分探索手段22と、レーダ検出部14により検出された検出点データから検出対象物体に対応する検出点データを抽出する検出点抽出手段24と、検出点抽出手段により抽出された検出点データに合わせて、画像部分探索手段により検出された画像部分の位置を補正する画像部分補正手段26とを有する。
(もっと読む)
レーダ装置及び光軸調整装置
【課題】光軸調整を正確に行う。
【解決手段】レーダ装置1は、平板状のプリント基板11と、予め設定された第1周波数の第1電磁波を送受信するべく、プリント基板11上に形成されたアンテナ111と、プリント基板11上に形成され、レーダ装置1の光軸調整において外部から照射される第2電磁波を反射可能に構成されたミラー113と、を備える。
(もっと読む)
車両周辺監視装置
【課題】視差オフセット量を算出するに際に基準とする対象物を移動する対象物として高精度に視差オフセット量を算出することができる車両周辺監視装置を提供する。
【解決手段】本発明の車両周辺監視装置によれば、2つの撮像装置の光軸間平行度ずれに起因する視差オフセット量が算出される。レーダ装置により距離が検出される一の照射領域に対象物が1つのみ存在し、かつ、一の照射領域に対応する撮像画像における一の局所画像領域に、抽出された対象物が1つのみ存在するという所定条件を満たす場合に、レーダ装置により対象物までの距離が検出されるとともに、2つの撮像装置により得られた対象物の視差が算出される。前記のことより、視差オフセット量を高精度に算出することができる。
(もっと読む)
先行車両の位置検出方法及び位置検出装置並びにデータフィルタリング方法
【課題】先行車両の位置データの算出精度を向上することができる位置検出方法及び位置検出装置を提供する。
【解決手段】自車両1に対する先行車両2の位置を検出する方法であって、車間距離情報riと横位置情報Li,Riからなる一次データセットを取得する工程と、一次データセットの車間距離情報riに対して線形回帰処理を行い、得られた線形回帰線との差が所定の閾値以下の車間距離情報riとこれに対応する横位置情報Li,Riとからなる二次データセットを取得する線形回帰処理工程と、この二次データセットの横位置情報Li,Riに対してクラスタリング処理を行い、最大のクラスタに含まれる横位置情報Li,Riとこれに対応する車間距離情報riとからなる三次データセットを取得するクラスタリング処理工程と、この三次データセットを用いて現在時刻t0における車間距離と横位置とを算出する位置情報算出工程とを備えた。
(もっと読む)
物体検出装置
【課題】 レーダを用いた物体検出において物体を正確に検出する物体検出装置を提供する。
【解決手段】 本発明に係る物体検出装置1の物体検出部4は、複数の検出点データから一つの物体に対応する複数の検出点データをグルーピングするグルーピング手段41と、グルーピング手段によりグルーピングされた検出点データに対応する画像部分から、検出対象物体の所定の一部分を探索して検出する部分探索手段42と、レーダ検出部から、部分探索手段により検出された一部分の両端へ延びる2本の直線を算出する直線算出手段43と、グルーピング手段によりグルーピングされた検出点データのうち、直線算出手段により算出された2本の直線よりも内側の検出点データを、検出対象物体の一部分に対応する検出点データとして抽出する検出点抽出手段44とを有する。
(もっと読む)
距離測定
距離測定装置DDMは、送信モードにおいて送信される電磁信号TBと受信モードにおいて受信される電磁信号の反射RBとの間の遅延に基づいて距離指標DVを提供する。距離測定装置は、電磁信号TBを送信するため及びその反射RBを受信するための複数のアンテナを含んでいるアンテナ・モジュールAMを含む。ビーム成形モジュールBFは、それぞれのアンテナに対するそれぞれの大きさ及び位相関係を定めて、2つの前述のモードのうちの少なくとも1つにおいて指向性アンテナ・パターンをアンテナ・モジュールAMに提供させる。好ましくは、ビーム成形及びステアリング制御モジュールBCは、方向コマンドDIRの関数として、それぞれの大きさ及び位相関係を制御する。三次元画像は、二次元画像中のそれぞれの部分のためのそれぞれの距離指標DVを取得するようにそれぞれの方向コマンドDIRを適用することによって形成されることができる。 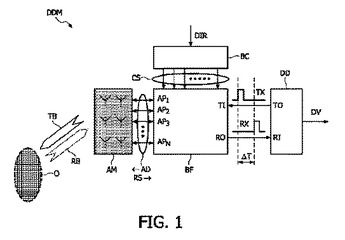 (もっと読む)
(もっと読む)
物体検出装置
【課題】自車両の挙動が変化した場合でも適切な画像処理領域を設定することができる物体検出装置を提供することを課題とする。
【解決手段】自車両周辺を撮像した画像における特定の画像処理領域に対して画像処理を行い、自車両周辺の物体の情報を取得する物体検出装置であって、自車両周辺の物体の位置情報を取得する位置情報取得手段(S1)と、自車両周辺を撮像する撮像手段と、位置情報取得手段で取得した物体の位置情報に基づいて撮像手段で撮像した画像における画像処理領域を設定する画像処理領域設定手段(S2)と、自車両の挙動の変化を検出する車両挙動検出手段(S3)と、車両挙動検出手段で検出した自車両の挙動の変化に応じて画像処理領域設定手段で設定した画像処理領域を補正する補正手段(S5)を備えることを特徴とする。
(もっと読む)
レーダ装置
【課題】測定範囲を狭くすることなく、人体へ不要な影響を与えることのないレーダ装置を提供する。
【解決手段】送信部は、自車両が停止していないとき、予め定められた処理周期における予め定められた送信期間を通じて送信信号Ssを生成し、生成した送信信号Ssを電磁波として放射する。一方、送信部は、自車両が停止しているとき、放射する電磁波の平均レベルを減少させる。送信部は、電磁波の平均レベルを減少させるとき、処理周期の長さに占める送信期間の長さの比率を減少させる。
(もっと読む)
物体検出装置
【課題】複数の移動物体が近接している場合であっても、各移動物体との正確な距離を検出する。
【解決手段】物体検出ECU1は、粗決定サーチ関数及び精決定サーチ関数に基づいて、移動物体毎に対応する遅延時間を特定できるか否かの判定を行う時間判定部106と、ステレオカメラ23を介して、複数の移動物体を含む画像を取得する画像取得部108と、遅延時間を特定できないと判定された場合に、取得された画像に基づいて、遅延時間を特定できないと判定された移動物体である特定困難物体に対応する粗決定サーチ関数及び精決定サーチ関数を補正する関数補正部112と、補正された粗決定サーチ関数及び精決定サーチ関数に基づいて、特定困難物体に対応する遅延時間を特定する遅延時間特定部113と、特定された遅延時間に基づいて、特定困難物体との距離を求める距離算出部114と、を備える。
(もっと読む)
飛行体捕捉システムおよび飛行体捕捉方法
【課題】 従来よりも容易・迅速にステルス化された目標を捕捉し得る飛行体捕捉システムを提供することを目的とする
【解決手段】 本発明に係る飛行体捕捉システムは、飛行体が飛行することにより発生する飛行機雲を捕捉する飛行機雲レーダ装置と、飛行する飛行体を捕捉する捜索レーダ装置と、前記飛行機雲レーダ装置により飛行機雲が捕捉され、かつ前記捜索レーダ装置により飛行体が捕捉されない場合に前記飛行機雲を発生する飛行体がステルス飛行体であると判断するステルス飛行体判断装置とを具備することを特徴とする。
(もっと読む)
地雷探知装置及び地雷探知システム
【課題】誤検知及び見落としを防止し、迅速に地雷探知を実行することができる地雷探知システムを提供する。
【解決手段】地雷探知システム1は、地雷が埋設されている可能性のある地雷探知エリア30をA方向及びB方向に走査して探知する地雷探知装置10と、地雷探知装置10から送信される情報を受信して解析及び表示するパーソナルコンピュータ(PC)20とを有する。地雷探知装置10の地雷探知部100は、金属探知機と、地中レーダーと、匂いセンサと、赤外線カメラと、アンテナに接続されてPC20と無線通信する通信部と、各部の動作を制御する制御部と、制御部により制御されて車輪110を駆動する車輪駆動部と、制御部により制御されて駆動して地雷探知部100をガイド120上で移動させるガイド駆動部とを有する。
(もっと読む)
レーダ装置
【課題】複雑な処理をせずとも、互いに略等しい相対距離に存在する対象物の数を検出することのできるレーダ装置を提供する。
【解決手段】画像処理部10は、放射された電磁波が、カメラ101によって撮像された画像に撮像されている他車両で反射した反射波を受信するまでの受信時間を算出する。さらに、画像処理部10は他車両との相対距離を算出し、算出した相対距離と略同じ相対距離に存在する他車両の数を計数し、計数した数と算出した受信時間とを対応づける。レーダ処理部11は、放射された電磁波と反射波との相関を演算しながら、相関がピーク値を生じたときの反射波の受信時間と画像処理部10によって算出された受信時間とを比較して、略等しい受信時間に対応づけられた他車両の数を特定する。レーダ処理部11は、ピーク値を生じた相関の受信時間に基づき相対距離を算出し、特定した他車両の数を対応づける。
(もっと読む)
物体検出装置
【課題】反射波信号のサンプリング時間が長い場合であっても、物体との正確な距離を検出する。
【解決手段】物体検出ECU1は、ADコンバータ221から出力されるサンプリング時間ΔT毎の反射波信号を取得する受信信号取得部12と、周囲の物体の画像を撮像するステレオカメラ23を介して、物体との相対速度ΔVを検出する検出部13と、検出部13によって検出された相対速度ΔVから反射波のパルス間隔を求める間隔算出部15と、受信信号取得部12によって取得された反射波信号及び間隔算出部15によって求められたパルス間隔に基づいて、反射波の波形を求める波形算出部16と、求められた反射波の送信波に対する遅延時間を求める遅延時間算出部17と、求められた遅延時間に基づいて、物体との距離を求める距離算出部18と、を備える、
(もっと読む)
監視装置
【構成】管理品無線通信タグ(200)および管理者無線通信タグ(300)に基づいて管理対象品(100)の監視を行う監視装置であって、管理品無線通信タグに基づいて管理対象品の存在を検出する第1検出手段(16、34)、管理者無線通信タグに基づいて前記管理者の存在を検出する第2検出手段(16,34)、管理品無線通信タグからの電波に基づいて管理対象品の位置の変化量に応じた値を特定する特定手段(34e)、変化量に応じて時間を計測する計時手段(27)、第1検出手段の検出結果、前記第2検出手段の検出結果、前記特定手段の特定結果、および前記計時手段の計時結果の少なくとも1つに応じて警報を出力する制御手段(16、36、28e)を備える。
【効果】状況に応じて的確な警報を出力することができる。
(もっと読む)
レーダ装置
【課題】他車両の数に応じて符号信号の符号長さを調節することのできるレーダ装置を提供する。
【解決手段】カメラで自車両の走行方向を撮像した画像を画像処理することにより他車両の数を計数し、計数した数に基づいて符号信号の符号長さと次数を決定する。決定した符号長さと次数で生成した符号信号を電磁波として空間に放射し、当該符号信号と受信部によって受信された信号との相関を演算することにより、他車両との相対距離などを対象物の情報として算出する。
(もっと読む)
車両用外界認識装置、および、車両システム
【課題】複数の物体が互いに近接している場合でも、これらの物体を高精度で個体認識すること。
【解決手段】車両用外界認識装置100の衝突判定部4は、物体群の左端位置、中心位置、右端位置それぞれについて、両端横速度計算部3で計算される各位置における各横速度をもとに、相対座標系における物体群の移動軌跡を計算し、その移動軌跡が相対座標系における原点に近づくほど各位置における危険度が高いものとして、各位置における危険度を計算し、衝突回避制御部5は、衝突判定部4により計算される物体群の各位置における危険度のうち、少なくとも1つの位置における危険度が所定しきい値を超えるときに、その危険度に対応する物体群に関する衝突回避制御を実行する。
(もっと読む)
車両の障害物検知装置
【課題】自車両の発進時に駆動輪が空転して自車両が走行できない状況を想定し、この状況下で、自車両前方の障害物が静止物であることを精度良く確実に判定できる、車両の障害物検知装置を提供する。
【解決手段】レーダユニット2により自車両Cに対して自車両前方の障害物の相対位置と相対速度とが検知され、その障害物検知情報に基づいて自車両Cの作動機器が制御されるが、更に、自車両Cの駆動輪の回転の有無と自車両Cの移動の有無が検知され、駆動輪の回転が検知された場合であって、自車両Cの移動が検知されない場合、検知された障害物の自車両に対する相対速度に変化がない障害物は静止物であると判定される。
(もっと読む)
物体検出装置
【課題】検出性能の低下を的確に判定する。
【解決手段】物体検出ECU11は、ミリ波レーダ21を介して、車両の前方に設定された第1領域R1内の物体を検出する第1検出部111と、CCDカメラ22,23を介して、車両の前方の、第1領域R1の少なくとも一部の領域を含む第2領域R2内の物体を検出する第2検出部112と、第1領域R1及び第2領域R2に含まれる領域である第3領域R3内に含まれる少なくとも1の物体が第2検出部112によって検出されているか否かを判定する検出判定部113と、検出されていると判定された場合に、第2検出部112によって検出されている第3領域内の物体の内、少なくとも1の物体が第1検出部111によって検出されていない場合に、ミリ波レーダ21又は第1検出部111の検出性能が低下していると判定する性能判定部115と、を備える。
(もっと読む)
物体検知装置、周辺監視装置、運転支援システムおよび物体検知方法
【課題】様々な物体を高精度に認識することのできる物体検知装置、物体検知方法、またかかる物体検知を用いた周辺監視装置および運転支援システムを提供すること。
【解決手段】物体検知波部10は、カメラ32が撮影した画像に対する画像認識によって物体候補領域を識別し、当該領域に存在する可能性のある物体の種別、方向、距離、角度に基づいてレーダ検知の閾値を設定した閾値マップを作成する。検知処理部16は、レーダ31の反射波強度と閾値マップに示された閾値とを比較して、物体の存在を検知する。
(もっと読む)
101 - 120 / 296
[ Back to top ]