
Fターム[5J070BD08]の内容
レーダ方式及びその細部 (42,132) | 組合せ (788) | レーダと光学装置 (296)
Fターム[5J070BD08]に分類される特許
21 - 40 / 296
目標検出装置
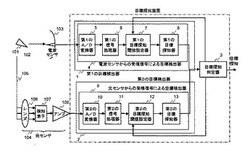
【課題】 複数種類のセンサを組み合わせて双方の目標検出情報に基づいて目標検出の閾値を可変調整することにより、目標からの反射波あるいは物理的なエネルギー波の強度が低い目標の場合でも、目標の検出を可能にする。
【解決手段】 第1のセンサからの受信信号を入力し、該受信信号より目標を検出し、第1の目標検出情報を出力する第1の目標検出器と、第1の目標検出器とは異なる物理的性質をもつ第2のセンサからの受信信号を入力し、該受信信号より目標を検出し第2の目標検出情報を出力する第2の目標検出器と、第1の目標検出器及び第2の目標検出器からの目標検出情報を入力とし、最終的に目標が存在するか否かを判定し、判定結果を出力するとともに、判定結果に基づき、修正された目標検出のための閾値を第1の目標検出器並びに第2の目標検出器に対して出力する目標探知判定器を備える。
(もっと読む)
物体検出装置及び物体検出方法

【課題】誤結合検出を防止することにより、物体検出精度を向上させることができる、物体検出装置及び物体検出方法を提供すること。
【解決手段】物体検出装置200において、検出物体領域補正部103が、基準画像平面内の座標群と、レーダによって検出された、各座標における検出移動速度とが対応付けられた移動速度マップ情報に基づいて、検出物体領域設定部102によって設定された検出物体領域を補正する。こうすることで、検出物体領域が誤結合の結果として得られたものであっても、その検出物体領域を移動速度マップ情報を用いて修正することができる。この結果、物体検出精度を向上させることができる。
(もっと読む)
車載用頭部位置検出装置、車載用表示装置及び運転支援装置
【課題】頭部の位置を正確に検出できる車載用頭部位置検出装置、車載用表示装置及び運転支援装置を提供する。
【解決手段】実施形態によれば、複数の送受信器と送受信制御部とを備えた車載用頭部位置検出装置が提供される。複数の送受信器は、車両に搭乗する搭乗者の頭部に対向する互いに異なる位置に設けられる。複数の送受信器は、頭部に向けて音波及び電磁波の少なくともいずれかの波を送信し、反射波を受信する。送受信制御部は、複数の送受信器に接続される。送受信制御部は、複数の送受信器のいずれかに、送信波を送信させ、その反射波を複数の送受信器で受信した結果を入手し、その結果に基づいて頭部に最も近い送受信器を検出する。送受信制御部は、頭部に最も近い送受信器に頭部検出波を送信させ、その反射波を複数の送受信器で受信した結果を入手し、その受信結果に基づいて頭部の位置を検出する。
(もっと読む)
レーダ装置
【課題】検知範囲の変更が可能で、而も小型化を可能としたレーダ装置を提供する。
【解決手段】中心に設けられる信号処理ユニット2と、該信号処理ユニットに組込まれ、ホーン型送受信アンテナ6を有する少なくとも1つの高周波ユニット3とを具備し、前記信号処理ユニットは円周方向に等角度で順次傾斜する側面を有し、内部に信号処理部を有すると共に前記側面には前記信号処理部に接続されたソケットが設けられ、前記高周波ユニットは上下に縦長の送信用アンテナ開口21と受信用アンテナ開口22とを有すると共に前記ソケットに嵌合するコネクタとを有する。
(もっと読む)
センサ統合システム及びセンサ統合方法
【課題】複数種類のセンサによる観測データを組み合わせて、目標物の高精度な移動軌跡を抽出する。
【解決手段】プロセッサと、前記プロセッサに接続される記憶装置と、前記プロセッサに接続される出力装置と、を備えるセンサ統合システムであって、前記記憶装置は、複数のセンサによって観測された観測データを保持し、前記観測データはあらかじめ規定された項目のうち選択的に記述された項目を含み、前記プロセッサは複数の前記観測データの選択記述された前記項目を組み合わせ、一つ以上の目標物の移動軌跡を推定し、前記出力装置は、前記移動軌跡を示す情報を出力する。
(もっと読む)
目標検出装置およびシステム
【課題】屋外等の暴露環境に適した安価な目標検出装置または目標検出システムを提供し、監視領域内に侵入した複数の目標を高精度かつ高速に検出する。
【解決手段】センサ手段102−1〜102−mと送受信手段101の間の接続を、スイッチ手段103により時分割で切り替えることで、送受信手段101の部品点数を抑えた構成で広い測角範囲がカバーされる。また、2台の目標検出装置のみを用いて目標の定位を行う場合、2台の装置のそれぞれがカバーする角度範囲の両方に共通する領域の情報や、一方の装置から各目標を経由して他方の装置に至る総合伝搬距離情報を用いて、円の方程式の組み合わせの曖昧さに起因する誤検出を防止する。
(もっと読む)
移動物体検出装置及びインターホン装置
【課題】 人物が近づいてきた場合及び離れる動作を的確に検出し、単純な出力信号により判定結果を出力する移動物体検出装置を提供する。
【解決手段】 ドップラーセンサ部14aのI相出力及びQ相出力から相互の位相差を演算し、求めた位相差を正負何れかの極性の電圧情報で出力する位相差演算処理部41と、この出力する電圧の絶対値が所定値以下である場合は電圧信号を出力しない不感帯処理部42と、この出力電圧情報が負の極性を有する場合は近づく物体があると判断して「H」信号を第1出力部43aから出力し、正の極性を有する場合は離れる物体があると判断して「H」信号を第2出力部43bから出力する一対のコンパレータ52a,52bと、不感体処理部42が出力する電圧の変化を正極の電圧変化とするためにオフセット電圧を加える加算回路51とを設けた。
(もっと読む)
測位情報形成装置、検出装置、及び測位情報形成方法
【課題】物体検出精度を向上する測位情報形成装置、検出装置、及び測位情報形成方法を提供すること。
【解決手段】測位情報形成装置100において、合成部103が、カメラ距離マップ情報とレーダ距離マップ情報とを合成し、「合成マップ情報」を生成する。この合成マップ情報は、検出装置200において物体検出処理に用いられる。こうすることで、カメラ距離マップ情報とレーダ距離マップ情報とを合成した情報に基づいて物体検出することができるので、物体検出精度を向上することができる。すなわち、カメラ距離マップ情報とレーダ距離マップ情報とを合成することにより、地面又は壁面等からの反射による不要なノイズの除去が期待できるので、物体検出閾値を低く設定することができる。このため、従来では、検出不可能と判断された物体であっても、検出することができる。
(もっと読む)
測定装置および測定方法
【課題】打撃物と被打撃物の両方の運動状態をより正確に測定することができるようにする。
【解決手段】ドップラセンサ11(ドップラセンサ11aまたは11bの一方)は、送信した第1の送信信号が打撃物に反射して戻ってきた第1のドップラ信号を受信する。マイクロホン14は、被打撃物が打撃物によって打撃された瞬間である打撃タイミングを検出する。制御部19は、検出された打撃タイミングから所定期間前の時刻までの第1のドップラ信号に基づいて、打撃物の速度を演算する。ストロボカメラ2の撮像部23は、演算された打撃物の速度に基づいて、被打撃物の運動状態を演算するために用いる、打撃直後の被打撃物を撮像する。本発明は、例えば、ゴルフにおける打撃物としてのゴルフクラブの速度と、被打撃物としてのゴルフボールの速度を測定する測定システムに適用できる。
(もっと読む)
RFIDタグ位置検出装置およびRFIDタグの位置検出方法
【課題】迅速にRFIDタグの位置を検出する。
【解決手段】RFIDタグ位置検出装置1は、RFIDタグ2a〜2cへ信号を送信する送信アンテナ11と、RFIDタグ2a〜2cからの応答信号を受信する4つの受信アンテナ12a〜12dと、各受信アンテナ12a〜12dが受信した応答信号に応じて出力する信号の時間差を計測し、計測した各時間差に基づいてRFIDタグ2a〜2cの相対座標を演算する計測部とを備えている。
(もっと読む)
移動目標対応型スキャン相関方法
【目的】本発明は、レーダ、超音波、光学カメラ装置に関し、従来のスキャン相関処理の欠点である移動ターゲット信号をクラッタ同様に抑圧してしまう問題を解決するとともに、クラッタのみをより積極的に抑圧し、ターゲットの識別能力を向上させることを目的とする。
【構成】信号受信部より逐次出力されるビデオ信号をスキャン毎記憶する受信映像メモリと、前記受信映像メモリに記憶された複数のスキャン画像を小区画領域に分割し、その領域内に存在するターゲットの移動ベクトルを算出する移動ベクトル算出部と、前記小区画領域内にターゲットが存在する可能性を示す指標を算出するターゲット指標算出部と、前記小領域領域内のクラッタレベルを算出するクラッタレベル算出部と、前記、ターゲット指標、移動ベクトル、クラッタレベル情報を入力とするスキャン相関処理部と、前記スキャン相関処理結果を表示する表示部とを有する。
(もっと読む)
イメージング装置及びイメージング方法
【課題】近傍界イメージングにおいて、イメージング像の高分解能化を可能とする。
【解決手段】送信回路12からミリ波を出力させて送受信アンテナ14から放射し、受信回路13により、観測対象物3の表面で反射したミリ波を送受信アンテナ14を介して測定信号として受信し、測定信号のIQ値から反射信号のIQ値を算出するオフセット補正関数の未知数を求めてオフセット補正関数を導出し、測定信号のIQ値からオフセット補正関数で算出した反射信号のIQ値を引いて散乱信号のIQ値を求める。これにより、イメージング像の高分解能化が可能となる。
(もっと読む)
障害物認識装置
【課題】車両の進行方向の速度変化と共に車両の進行方向と垂直な左右方向の速度変化も判断することで、障害物検出率の向上を図った障害物認識装置を提供する。
【解決手段】レーダを介して検出した物標について、物標の情報と車両の走行情報とに基づき、車両の進行方向に関する絶対速度及び車両の左右方向に関する絶対速度の両方を判断する。両方の絶対速度が所定の基準値以下であると判断された場合、すなわち物標が路面を移動していないと判断された場合に限り、レーダ検出によって得られる情報とカメラ等によって撮像される画像情報とをフュージョンした情報を用いて物標の立体物判断を行う。いずれかの絶対速度が所定の基準値を超える場合には、レーダ検出によって得られる情報のみによって物標の立体物判断を行う。
(もっと読む)
障害物認識装置及び障害物認識方法
【課題】高い精度で障害物を認識することができる障害物認識装置を提供する。
【解決手段】本発明の一実施形態に係る障害物認識装置1は、電磁波を発信し、その反射波の反射出力に基づいて障害物を検出する第1の障害物検出手段11と、第1の障害物検出手段とは異なる方法で障害物を検出する第2の障害物検出手段12と、第2の障害物検出手段により検出された複数の障害物についてそれらの障害物の推定反射出力を合成した合成推定反射出力を算出する反射出力推定手段22と、合成推定反射出力と第1の障害物検出手段により計測された計測反射出力との比較結果を用いて障害物を認識する障害物統合認識手段24と、を備える。
(もっと読む)
障害物認識装置
【課題】自車両周辺に存在する障害物のレーダ情報、および車載カメラによって撮像された画像情報を最適に用いながら、当該障害物の位置および大きさ等の詳細情報を正確に認識する障害物認識装置を提供する。
【解決手段】本発明の障害物認識装置は、レーダを介して障害物のレーダ情報を取得するレーダ情報取得手段と、レーダ情報に基づいて障害物を第1障害物と第2障害物とに分類する障害物分類手段と、障害物が第1障害物に分類された場合、レーダ情報と画像情報とに基づいて障害物を認識し、障害物が第2障害物に分類された場合、レーダ情報に基づいて障害物を認識する障害物認識手段とを備える。
(もっと読む)
情報読取装置及びプログラム
【課題】複数の物品の配置順どおりに読み取りを行った場合に、全体に対してどの辺りに不具合が起きているかを適切に明示できるようにする。
【解決手段】制御部1は、複数の商品の個々から商品識別情報をRFID・R/W部7によって逐次読み取ると共に、その読取タイミングを検出して、商品識別情報及び読取タイミングを読取情報メモリM4に記憶させた後、在庫情報記憶部M2の内容と読取情報メモリM4の内容との比較結果に基づいて、商品毎に正常な読み取りが行われたか否かを判別し、全体に対してどの辺りに不具合が起きているかを適切に明示する。
(もっと読む)
RFIDタグの動き追跡技術
【課題】RFIDタグの動きを追跡する技術を提供することを目的とする。
【解決手段】
信号強度情報を使用してRFIDタグの動きを追跡する技術である。移動中のRFIDタグから読み取り値の系列を取得するために、RFIDリーダの単一のアンテナが使用されてもよい。信号強度インジケータ(例えば、受信信号強度インジケータ(RSSI))は、読み取り値毎に判定される。RSSIの系列は、RFIDタグの動きの経路と、その経路に沿ったRFIDタグの動きの方向を推定するために使用される。
(もっと読む)
測定装置および測定方法
【課題】打撃物と被打撃物の両方の速度をより正確に測定することができるようにする。
【解決手段】ドップラセンサ11aは、送信した第1の送信信号が打撃物に反射して戻ってきた第1のドップラ信号を受信する。ドップラセンサ11bは、送信した第2の送信信号が被打撃物に反射して戻ってきた第2のドップラ信号を受信する。マイクロホン14は、被打撃物が打撃物によって打撃された瞬間である打撃タイミングを検出する。データ処理装置2の演算部32は、打撃タイミングから所定期間前の時刻までの第1のドップラ信号に基づいて打撃物の速度を演算するとともに、打撃タイミングから所定期間後の時刻までの第2のドップラ信号に基づいて被打撃物の速度を演算する。本発明は、例えば、ゴルフにおける打撃物としてのゴルフクラブの速度と被打撃物としてのゴルフボールの速度を測定する測定装置に適用できる。
(もっと読む)
走行支援装置
【課題】車両の前方の検出領域において、車両の進路に向かって横方向から検出領域に進入した物体を極力速く検出して警報を指令するとともに、誤検出を考慮して不適切な衝突回避の実行を防止する走行支援装置を提供する。
【解決手段】走行支援装置は、検出領域の外部から検出領域に、車両の進路に向かって横方向から進入した物体の横移動速度が所定速度以上であり、かつ物体と車両との距離が所定距離以下である場合(S402:Yes)、検出領域の範囲内で通常警報領域の側方に通常警報領域よりも横方向に広がる拡張警報領域を設定する(S408)。車両支援装置は、通常警報領域の外部の拡張警報領域の範囲内であれば(S410:No)、運転者によりブレーキ操作およびステアリング操作がなされておらず、車両と物体との衝突予測時間が所定の警報時間以下の場合(S412:Yes)、運転者に対する警報だけを車両制御ECUに指令する(S414)。
(もっと読む)
物体検出装置
【課題】夜間または夜間に相当する暗さにおいて物体の誤検出を低減する物体検出装置を提供する。
【解決手段】夜間状態ではない場合(S400:No)、物体検出装置は、判定閾値を50%に設定する(S402)。夜間状態の場合(S400:Yes)、物体検出装置は、先行車両および対向車両を除き車両前方の物体を検出すると(S404:Yes)、前照灯をハイビームにするよう指令し(S406)、判定閾値を65%に設定する(S408)。物体を検出しなかった場合(S404:No)、物体検出装置は、前照灯がハイビームであれば(S410:No)、判定閾値を65%に設定し(S408)、前照灯がロービームであれば(S410:Yes)、判定閾値を80%に設定する(S412)。物体検出装置は、カメラとレーダとを合わせた検出信頼度が判定閾値以上であれば(S414:Yes)、警報および自動制動の少なくとも一方を指令する(S416)。
(もっと読む)
21 - 40 / 296
[ Back to top ]