
Fターム[5J083AA03]の内容
音波、超音波を用いた位置、速度等の測定 (14,323) | 方式 (1,325) | アクティブ (1,085) | 再放射 (60)
Fターム[5J083AA03]に分類される特許
41 - 60 / 60
撮影位置特定システム、撮影位置特定装置及び撮影位置特定方法

【課題】電波の使用が認められていない環境においても、画像を撮影した位置を正確に求めることができる撮影位置特定システム、撮影位置特定装置及び撮影位置特定方法を提供する。
【解決手段】撮影指示を取得する入力部11と、撮影指示を取得した場合に被写体を撮影する撮影部12と、少なくとも3台の端末の位置を予め記憶する記憶部17と、撮影指示を取得した場合に少なくとも3台の端末に有線通信を利用して制御信号を送信する通信部13を有し、少なくとも3台の端末から発信される音波を受信する音波受信部14と、音波を受信した時刻と制御信号を送信した時刻を取得する時刻取得部15と、音波を受信した時刻と制御信号を出力した時刻との差と音速とに基づいて各端末までの距離を算出し、各端末までの距離に基づいて自撮影位置特定装置10aの位置を算出する制御部16を有し、記憶部17は、撮影結果と自撮影位置特定装置の位置を対応付けて記憶する。
(もっと読む)
アクテイブタグ装置

【課題】発信手段の方向および発信手段と受信手段の距離を精度良く検知する。
【解決手段】発信手段1の指向性アンテナの方向31に対向して受信手段2の指向性アンテナ21a,21bを向け、アンテナ21a,21bを切替えた時に受信した高周波信号のタイミング又は振幅又は周波数又は位相又はこれらの組合わせを検知し、発信手段1の方向や発信手段1と受信手段2の距離を検知する。その際、受信手段2の受信器で抽出した信号の少なくとも1サイクル分を単位として基準発振器に同期したサンプリング周波数でデジタル信号に変換し、このデジタル信号と、SinおよびCosのルックアップテーブルとの積和演算を行うが、そのときの−1の乗算はデジタル信号の補数を求めることにより行う。
(もっと読む)
RFIDタグの位置特定の方法及び装置
RFIDタグが、当該タグの位置の確定を容易にすると同時に、タグのバッテリのエネルギー消費(306)を最小限する方法及び装置である。所定間隔で、タグは、その識別子をステータス情報と共に送信する(302)。ステータスが、タグが新たな位置にあることを示す場合(304)、タグは、当該タグの位置の確定に関与することにより追加のバッテリエネルギーを消費する(306)。異なる速度で伝播する2つの信号をインタロゲータから送信することにより(602/604)、インタロゲータからタグまでの距離が確定される。タグにおける2つの信号の到達時刻の差を確定することにより、インタロゲータからタグまでの距離を確定することができる(606)。  (もっと読む)
(もっと読む)
封止されたコンパートメント内の漏れを検知するためのシステムおよび方法
車両などの封止されたコンパートメント内の漏れを検知するためのシステムは、送信機、少なくとも1つのセンサ、およびロジックを備える。一実施形態では、送信機は、車両内に配置され、無線通信インターフェイスおよび変換器を有する。変換器は、指定された周波数範囲内のエネルギーを送信するように構成される。センサは、車両の外部に配置され、変換器により送信されるエネルギーを感知するように構成される。センサは、さらに、複数のサンプル値を与えるように構成され、サンプル値はそれぞれ、指定された周波数範囲内でセンサにより感知されたエネルギーのそれぞれの量を示す。ロジックは、サンプル値に基づいて車両内の少なくとも1つの漏れを検知し、検出された漏れを示す出力を送るように構成されている。ロジックは、無線通信インターフェイスに、送信機を制御するための無線信号を送信するように構成される。 (もっと読む)
追尾システムおよび自走体
【課題】移動体とそれを追尾する自走体とを結ぶ直接経路が障害物によって遮断された場合にでも、移動体の相対位置を推定できる追尾システムを提供する。
【解決手段】移動体に配置されたトランスポンダと、トランスポンダを追尾する自走体とを含む追尾システムであって、自走体は、周囲の床面あるいは天井面に関する反射環境情報を入手する環境検知手段を備える。自走体は、第1の超音波を送信し、それを受信したトランスポンダは第2の超音波を送信し、次いで第2の超音波を受信することによって、トランスポンダから自走体に直接届く直接波と床面あるいは天井面を介して届く反射波とに関する受信情報を入手し、さらに受信情報と反射環境情報とを用いて、受信された第2の超音波が直接波であるか反射波であるかの判断を行い、その判断に基づいて受信情報を処理してトランスポンダの位置を推定し、追尾する。
(もっと読む)
位相共役波による距離変動計測方法及び距離変動計測システム
【課題】距離の計測対象となる海底の2点間に、海流、水塊、渦、等の不均質が存在しても、この2点間の距離変動を十分な計測精度を以って計測することが可能である。
【解決手段】音源装置10と計測処理装置20とが、それぞれ海側プレート16の上面と陸側プレート22の海底に設置されている。音源装置から第1音響プローブ波が計測処理装置に送られ、これに対して、計測処理装置から音響位相共役波が音源装置に送り返されて基準プローブ波として保存される。次に、音源装置から第2音響プローブ波が計測処理装置に送られ、これに対して、計測処理装置から、複数の音響変調位相共役波を位相変調量の大きさの順序に従って順次音源装置に送り返されて、それぞれが計測プローブ波として生成される。これらの計測プローブ波と基準プローブ波とを順次干渉させて干渉波が生成される。干渉波の振幅が最小となる位相変調量から、音源装置と計測処理装置との距離の変動量を求める。
(もっと読む)
位置管理システムおよび位置管理プログラム
【課題】 位置検知が必要な空間内の様々な検知対象物の3次元位置情報をより精度良く認識する位置管理システムおよび位置管理プログラムを提供する。
【解決手段】 本発明の位置管理システムAは、位置が検知される検知対象物41,42に設けられた、互いの検知能を補完し合う二種以上の検知用タグ(超音波タグ26、RFIDタグ36)と、検知用タグの種類別に設けられ、検知用タグからの信号を受信すると当該検知用タグに付された固有のタグIDと、自己に付されている装置IDと、を含む検知結果データを生成する検知装置21,31と、取得した検知結果データと、検知装置21,31の配置データとに基づいて処理することで検知対象物41,42の位置を特定する位置データ処理装置1とを備えている。
(もっと読む)
ダイバー用ナビゲーション支援
ダイバー・ユニットは特定の目標物への距離と方向とを算出する。目標物が障害に遮られている場合、ダイバー・ユニットは別のダイバー・ユニットからナビゲーション支援データを受け取る。ナビゲーション支援データは両ダイバー・ユニットを結んだ共通の基準に対する方向の情報を含む。 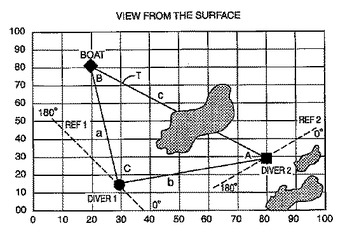 (もっと読む)
(もっと読む)
人物追跡システム
【課題】画像と音声を同時に利用するとともに能動的な追跡方式として着目追跡対象人物の同定の確実性を高めること。
【解決手段】探査用音源1,2、探査用受音器3〜5、応答音源6〜8は、応答音源システムを構成し、追跡対象人物A〜Cの位置を特定する。処理手段17は、例えば探査用音源1から探査音波が発生された時刻から応答音源6からの応答音波が探査用受音器3〜5で受音された時刻までの時間に基づいて応答音源6の位置を特定する。また、処理手段17は、応答音源6の位置と撮像手段14〜16が撮像した画像における画像的特徴領域とに基づいて画像中の画像中の追跡対象人物Aの画像領域を特定するとともに、受音器9〜13で受音した音声中の追跡対象人物Aの音声を応答音源6の位置を用いて分離する.
(もっと読む)
水中航走体の検出位置修正方法およびシステム
【課題】 水面に浮上する手間やトランスポンダなどを設置する手間などを省けるようにする。
【解決手段】 水中航走体に予め与える航走経路中に、相互に交差する緯度検出経路44と経度検出経路46とからなる位置修正用経路43を設定する。水中航走体は、慣性航法により検出した位置に基づいて、緯度検出経路44と経度検出経路46とを連続して航走する。位置修正用経路43を航走中の水中航走体と支援船との相対位置を音響測位する。支援船について求めた位置と音響測位した相対位置とに基づいて、水中航走体が実際に航走した緯度、経度を求める。水中航走体が実際に航走した緯度、経度と位置修正用航路との偏差δLAT、δLONを求め、この偏差を水中航走体に与えて検出位置を修正する。
(もっと読む)
位置検出システム、スピーカシステムおよびユーザ端末装置
【課題】視聴者となるユーザの位置をより簡単に自動検出できるシステムを提供する。
【解決手段】スピーカ装置2は、スピーカSPから測定用音声信号を出力するとともに、タイマ23aにより時間の測定を開始する。リモコン3は、マイク32により測定用音声信号を受信すると、受信した旨を示す受信コマンドをスピーカ装置2に送信する。スピーカ装置2は、受信コマンドを受信すると、タイマ23aを停止させる。このようにして離間した2つのスピーカSPから測定用音声信号を出力させ、この測定用音声信号がリモコン3に到達するまでの時間を計測し、この計測した2つの時間に基づいて、演算部23cはリモコン3の位置を演算する。
(もっと読む)
追尾システムおよびそれに用いられる自走体
【課題】 移動体の相対位置を高精度に計測して信頼性の高い追尾が可能な追尾システム、およびそれに用いられる自走体を提供する。
【解決手段】 移動体2に配置されたトランスポンダ20とトランスポンダ20を追尾する自走体1とを含む追尾システムである。(i)自走体1は、時間T(0≦T)に関する情報を含む第1の超音波を送信し、(ii)トランスポンダ20は、第1の超音波を受信し、時間Tの経過後に第2の超音波を送信し、(iii)自走体1は、第2の超音波を受信することによってトランスポンダ20の位置を推定する、というステップを含む位置推定処理が行われる。時間Tは、第2の超音波が、自走体1の周囲に存在する物体によって反射されて受信される第1の超音波と識別可能となるように設定される。そして、上記物体の存在状況に応じて時間Tが増減されるように、物体の存在状況に応じて時間Tに関する情報が決定される。
(もっと読む)
海の中の個人のための信号伝達/位置検出装置及びその使用方法
海の中の個人のための信号伝達及び位置検出装置及びその使用方法。この海の中の個人(1)のための信号伝達及び位置検出装置は、海の中の個人(1)が携帯し、第1の信号(2a)の搬送波を送信するように設定された個人警報器(2)を構成する超音波送信器と;海面上に配置され、個人警報器(2)によって送信された第1の信号(2a)を抽出することができる水中アンテナ(4)と、第2の超音波信号(2b)を送信する手段と、第2の超音波信号(2b)に応答して受信された超音波信号の関数として個人警報器(2)の位置を計算すること、及びGPS等の全地球測位システムの座標に前記情報を変換することができる手段と、無線受信機(6)を備えた携帯又は固定警報処理センター(7、8)にこれらの座標を示す信号を送信することができる電波(5)を送信するための装置と、を備える地表観測手段(3)と;を具備する。  (もっと読む)
(もっと読む)
潜水船の追跡のための装置及び方法
潜水船(11)の追跡のための装置及び方法において、プラットホーム(13)は、潜水船(11)の現在位置の規定のための追跡装置(15)と一緒に水中内に投入され、かつ潜水位置で三次元的に安定にされるようになっている。このために、プラットホーム(13)は、水平方向若しくは垂直方向に作用する操縦駆動部(18,19)を有しており、該操縦駆動部は制御回路内に配置されている。  (もっと読む)
(もっと読む)
受動超音波RFIDエレベータ位置決め基準システム
信号(25)を送り出すようにした電磁送信機および音響信号(23)を受け取るようにした音響受信機(21)を含む複数のトランスポンダ・モジュール(11)を含む、移動部材(33)の位置を測定する装置であって、これらの複数のトランスポンダのうちの少なくとも2つを、この測定される位置の周りに配置している装置。  (もっと読む)
(もっと読む)
位置検出システム、発信装置、サーバならびに同システムにおける無線信号の衝突回避方法
【課題】 無線信号の衝突を回避しつつタグの消費電力を軽減する。
【解決手段】 第1の無線信号を受信後、第2の無線信号を送信するまでに、タグ(TG)固有の待機時間を入れ、送信時間をシフトすることにより、あるいは、タグが第1の無線信号の電界強度を測定し、電界強度が小さいときに待機時間を短く設定し、その情報を含めてサーバへ第2の無線信号を送信することにより、サーバ(SV)は、タグから受信した第2の無線信号が示す符号から待機時間を算出する。また、第1の無線信号に信号を入れ、タグがその情報を読みルールに従い第2の無線信号を送信するか否かを決定することで衝突回避してもよい。
(もっと読む)
機器艤装船舶
【課題】コンパクトな構造で、かつROVの位置の検知精度が向上する。
【解決手段】推進機を備え、測量や調査等に用いるROVの位置を検知するトランスポンダと、3個以上のトランスデューサを船体に艤装する機器艤装船舶であり、トランスデューサを取り付けた支持部材と、支持部材を直線状に移動させる移動機構とを有するトランスデューサ揚降装置を備え、トランスデューサを収納状態で船体の内部に位置させ、使用時に直線状に移動させて船体の開口部から斜め側方へ突出して水中へ入れる。また、トランスデューサを取り付けた支持部材と、支持部材を円弧状に移動させる移動機構とを有するトランスデューサ揚降装置を備え、トランスデューサを収納状態で船体の幅より内側に位置させ、使用時に円弧状に移動させて船体の幅より外側の水中へ入れる。
(もっと読む)
低コストの音響応答器位置測定システム
位置測定システムは、囲まれた3次元空間(100)においてタグの位置を決定するために音響信号を使用して通信する基地局(120,200)及び応答器タグ(140,250)を含む。前記基地局は、特定のタグの識別子と共に符号化された要求信号(310)を送信する。前記特定のタグは、固定の遅延(t2−t1)の後に音響応答信号(330)を用いて応答する。前記基地局は、受信されたラインオブサイト信号(330)及びその反射(340)に基づいて前記タグの位置を決定する。前記応答信号は、前記タグのステータスを含むデータ、又は関連したセンサ(270)若しくはアクチュエータ(280)からのデータと共に符号化されてもよい。前記要求信号は、前記タグ又は前記関連したセンサ及びアクチュエータを制御するデータと共に符号化されてもよい。電力管理方式が前記タグにより実行されてもよい。  (もっと読む)
(もっと読む)
ICタグのロケーション認識装置および方法
質問器1が、固有ID、Xa、Xb、Xcを読み取った後、IDを指定してプローブ信号発信コマンドを送信する。該当のICタグはそれぞれプローブ信号を順番に発信する。隣接するICタグ2は、質問器が指定したID,Xa、Xb、Xcを隣接IDとしてメモリに保存する。次に質問器1は隣接IDを読み取る。コントローラは、固有ID、Xa,Xb、Xcと隣接ID(Xb),(Xa・Xc)、(Xb)の組み合わせ(Xa−Xb)、(Xb−Xc)を求める。最後に繋ぎ合わせて(Xa−Xb−Xc)を得る。 (もっと読む)
水中の物体の位置をリアルタイムで決定するための方法および装置
様々なサンプリングレートで動作する多数のセンサを使用して水中の物体の位置決定をリアルタイムで達成するため、および中でも特に、検査業務を実行するために、決定された位置をリアルタイムで使用するための方法および装置が開示される。 (もっと読む)
41 - 60 / 60
[ Back to top ]