
Fターム[5J083AA03]の内容
音波、超音波を用いた位置、速度等の測定 (14,323) | 方式 (1,325) | アクティブ (1,085) | 再放射 (60)
Fターム[5J083AA03]に分類される特許
21 - 40 / 60
人工物検出システム、該システムに用いられる人工物検出方法及び人工物検出制御プログラム
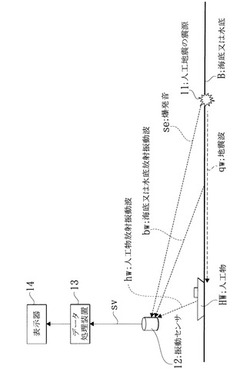
【課題】広範囲の海底や水底に存在する人工物を、埋没している場合も含めて一度に効率良く検出することが可能な人工物検出システムを提供する。
【解決手段】海底又は水底Bに配置されている人工地震発生手段(たとえば、人工地震の震源11)により、人工地震が発生し、海中又は水中に配置されている振動波検出手段(たとえば、振動センサ12)により、人工地震により発生する音波が検出されると共に、同音波よりも速い伝搬速度で地震波qwを伝搬する海底又は水底Bから海中又は水中に放射される振動波が検出される。そして、人工物存在判定手段(たとえば、データ処理装置13)により、振動センサ12で検出される振動波のレベルが相対的に高くなるとき、同振動波の到来方位が検出され、同到来方位の海底又は水底Bに人工物HWが存在することが判定される。
(もっと読む)
位置決定システム
本発明は、オブジェクト(2)の位置を決定するための位置決定システム(201)に関する。第一位置検出ユニット(205)が、送受信ユニット(203、214、216、217)によってオブジェクト(2)と基準位置に対して知られている転送位置との間で転送される放射に基づいて、オブジェクト(2)の第一の位置を検出する。第二位置検出ユニット(35)が、オブジェクト(2)の加速度および決定された前記第一の位置に基づいて第二の位置を検出する。出力ユニット(12)が、第一の位置および第二の位置の少なくとも一つを出力する。放射の転送が遮られても、第二の位置が出力ユニットによって出力されることができる。さらに、第一の位置が、第二の位置を決定するまたは第二の位置を更新するための初期値として使用されることができる。これはオブジェクトの位置決定の品質を改善する。 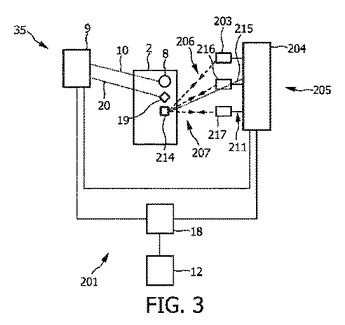 (もっと読む)
(もっと読む)
マルチオブジェクト測位システムおよび電力制御ベースの多重アクセス制御方法

【課題】既存のENとHNの問題を効果的に解決し、かつ信号の衝突を解決し、システムの時空間再使用性能を改善することが可能である多重アクセスコントロール方法を提供。
【解決手段】オブジェクトに取り付けられる複数のタグ装置とオブジェクトの位置決定のための1以上の測位装置を含む。タグ装置は、測位装置の状態情報を記録する測位装置リストを有する。タグ装置が、チャネル要求パケット(CRP)を間欠的に送信し、idle状態でかつCRPを受信した測位装置が、有効範囲内に、測位装置によって受信したCRPの送り主であるタグ装置にチャネルを割り当て、かつ他のタグ装置に測位装置の情報に通知するためのチャネル割当パケット(CAP)を送信し、CAPを受信したタグ装置が、CAPの内容に応じて記憶した前記測位装置リストを更新し、タグ装置が測位装置リストを参照してCRPの送信電力を調節する。
(もっと読む)
水中情報収集システム
【課題】水中航走体の移動領域の制約を低減すること。
【解決手段】水中航走体1は、自己の有する動力で水中を移動可能であり、水中情報を収集するサイドスキャンソーナ10C等と、サイドスキャンソーナ10C等が集めた水中の情報を送信可能な水中側第1音響モデム12Hとを有している。水上移動体2は、水中側第1音響モデム12Hと通信可能であり、水中側第1音響モデム12Hから送信された水中情報を受信する水面側第1音響モデム22Hと、水中航走体1の位置を検出する水中位置計測装置21とを有する。そして、水上移動体2は、水中航走体1の位置を検出しながら、水中航走体1の移動に合わせて水面Hを移動する。
(もっと読む)
ワーク検知システム、ピッキング装置及びピッキング方法
【課題】ワークの位置を短い時間で検出する装置を提供する。
【解決手段】ワーク11に配置され超音波による信号を発信する複数の超音波タグ7と、超音波タグ7が発信した信号を受信する3個以上の超音波受信装置15と、複数の超音波受信装置15が受信する信号の到達時間を用いて超音波タグ7の場所を検出する位置演算部とを有し、位置演算部は検出した複数の超音波タグ7における場所の情報からワーク11の位置と姿勢とを検出する。
(もっと読む)
位置検知システム
【課題】移動体の位置を検知する。
【解決手段】送信時刻情報を含むパケットを受信する手段と、パケットを受信してから一定経過時間後に、受信したパケットと同一内容のパケットを送信する手段とからなる移動ノードと、送信時刻情報を含むパケットを送信する手段と、移動ノードが送信したパケットを受信する手段と、受信パケットに含まれる送信時刻情報と、該パケットを受信した時刻情報と、一定経過時間情報とに基づいて、移動ノードとの距離を求める手段とからなる第1の固定ノードと、第1の固定ノードが送信したパケットを傍受する手段と、移動ノードが送信したパケットを傍受する手段と、傍受した2つのパケットの受信時間差に基づいて、移動ノードとの距離を算出する手段とからなる複数の第2の固定ノードと、第1の固定ノード、複数の第2の固定ノードのそれぞれと移動ノードとの距離情報とに基づいて移動ノードの位置を算出する手段とを備えた。
(もっと読む)
TOA(到達時刻)とRSS(受信信号強度)の融合による適応型測位法、装置、およびシステム
【課題】適応性、信頼性、高精度、拡張性、低コストな、適用型測位方法、装置、およびシステムを提供する。
【解決手段】対象から発信された信号のTOA結果およびRSS結果を収集する観測結果収集器と、収集されたTOA結果の数を決定するTOA結果カウンタと、入力されたTOA結果の数に基づいて移動体の位置計算法を選択し、選択された計算法を使用して移動体の位置を計算する位置計算器とを備える。TOA結果の数に基づいて適応的に適応型測位法を選択することが可能である。
(もっと読む)
単一装置上の位置決定(POD)ならびにPODを利用する自律型超音波位置決定システムおよびその方法
【課題】高精度、配置しやすさ、較正不要、低コスト、装置内調整および柔軟性などの利点がある、対象の所在確認および追跡を行う単一装置上の位置決定機能(POD)、自律型超音波屋内追跡システム(AUITS)を提供する。
【解決手段】AUITSは、RF信号および超音波信号を送信するためのRFトランシーバ205および超音波送信器206を含み、移動する対象に設置されたタグ装置201と、タグ装置から送信されたRF信号および超音波信号を受信し、移動する対象の所在を確認するPOD202とを備える。PODは、複数のリーフモジュール207から構成され、各リーフモジュールに位置信号の受信器208があり、タグ装置から送信された位置信号を受信し、リーフモジュール間に既知の構造トポロジー関係がある。次に、各位置信号受信器からの位置信号検出時間ならびにPODの構造トポロジー関係を利用して、対象の位置が計算される。
(もっと読む)
位置情報検出システム
【課題】 同時に複数のICタグの位置情報を把握できる位置情報検出システムを提供する。
【解決手段】 無線又は赤外線信号をトリガとして超音波を出力する複数のタグと、これらのタグから出力された超音波が入力されると共に、複数の前記タグから超音波が到達するまでに要した時間を計測する複数の基地局と、これらの基地局から入力される超音波到達時間情報に基づいて、複数の前記タグの位置を把握する管理コントローラを備えた位置検出システムにおいて、
複数の前記タグは所定の周波数の超音波を発生する超音波発生手段を備え、
複数の前記基地局は受信した複数の周波数の超音波を周波数毎に選別する周波数選別手段を備え、
前記管理コントローラは、
複数の前記タグと使用する超音波周波数の対応関係を記憶した管理テーブルと、
複数の前記基地局から入力される超音波到達時間情報から複数の前記タグの位置を、三角測量を用いて計算する制御部と
を備える。
(もっと読む)
手書筆跡入力システム
【課題】電子ペンの簡素化及び消費電力を低減する。
【解決手段】ペンスイッチと、マウス機能を選択するマウススイッチと、超音波と電磁波を発生させる回路を設けた、一つ以上の電磁波受信部および二つ以上の超音波受信部、前記電磁波信号及び、前記超音波信号の到達時間差から距離を計算し、電子ペンの位置座標データを算出する電子ペンであって、超音波発信部はコイルとピエゾ素子を有しコイルのインダクタンスとピエゾ素子のキャパシタンスによって構成されるLC共振回路の発振により、共振周波数の電磁波信号及び超音波信号が同時に発信し、前記ペンスイッチ及び前記マウススイッチの状態に対応して予め決められた時間間隔で、前記電磁波信号及び前記超音波信号を発信し、時間間隔を変換処理部が認識し、前記ペンスイッチ及び前記マウススイッチの状態情報に変換する。
(もっと読む)
位置検知装置および位置検知プログラム
【目的】この発明は、周期的に切替えられる複数のアンテナから発信される高周波信号を携帯端末により受信して相対位相を算出し携帯端末の位置あるいは相互間の距離あるいは相互間の方向を高精度で検知するための装置およびプログラムに関するものである。
【構成】基地局1において、複数の指向性アンテナ11a〜11dの間隔を1波長以下として周期的に切替えながら高周波信号を発信し、前記指向性アンテナ11a〜11dの指向性の方向を斜め下方に向けて角度を持たせて設置し、携帯端末2により受信される高周波信号の位相差を測定して携帯端末2の相対的な位置関係を高精度で検知するための計算式を開示する。
(もっと読む)
移動体通信及びその位置測定
超音波位置測定システムは、基地ユニットと少なくとも一つの移動ユニットとを備えている。移動ユニットおよび基地ユニットの各々は超音波信号を送信および受信するように動作可能となっている。移動ユニットは、前もって決められた信号を基地ユニットの送信状態に従って送信するように構成されている。基地ユニットは、信号が移動ユニットから基地ユニットまで伝わるのにかかる時間を測定することにより移動ユニットと基地ユニットとの間の距離を計算するように構成されている。 (もっと読む)
探知装置及び探知用プログラム並びに探知方法
【課題】物体と探知位置との位置関係に拘束されることなく、物体を探知する。
【解決手段】擬似音源と、監視ユニットとを有している。前記擬似音源は、アクティブ位相共役処理を行うことで音響信号に基づいて時間領域の位相共役波の走査音波を生成し、前記走査音波が前記音響信号の発生源である擬似音源に集中する特性を利用して、前記走査音波を伝搬空間内の探知物の上方から探知物に集中させる。前記監視ユニットは、パッシブ位相共役処理を行うことで、前記伝搬空間内を音波から前記探知物で反射した反射音波を抽出する。前記抽出した反射波の有無により、探知物を探知する。
(もっと読む)
音響波および電磁波を使用して遠隔デバイスを標定するための方法
遠隔デバイスによって占有される空間領域をその波面が伝搬し、最終的に遠隔デバイスに到達するパルスを音響送信器から放出するステップと、オンボード マイクロフォンにより前記波面が検知された瞬間に、各遠隔デバイスから無線周波数パルスが放出されるステップと、遠隔デバイスから伝搬する無線周波数信号を無線基地によって取得し、それによりi番目の音響源とj番目の遠隔デバイスとの間の距離に比例する到達時間遅延の計算を可能にするステップと、遠隔デバイスの個数に等しい最大長Mを有し、かつ受信時間と推定音速の積として得られる一連の距離で構成される受信ベクトルを、i番目の源による各放出に対し形成するステップとによる遠隔デバイスの標定。N+1個の受信ベクトルを形成するために、上記ステップを全ての音響源に対して繰り返し、そこから導出された行列式を解くことによってデバイスの位置を算出する。 (もっと読む)
水中移動体の位置決定のシステムと方法
水中移動体が水中運航中にその位置を決定するためのシステムと方法が示されている。浮遊用フロートが水面上又はその付近に止まっていて、その移動体には、絶縁ワイヤを含めることができる薄い綱により取付けられている。その移動体は水中を移動し、その後方にあるフロートを引張る。
そのフロートは位置信号を受けることができ、その信号はそのGPS位置を表示するように、又、その位置を正確に決定できるようにする。その位置は綱の中に位置するワイヤを通って水中移動体に伝達できる。水中移動体はセンサーを使用でき、及び/又は浮遊用フロートから移動体の位置のオフセットを決定するために計算できる。又、判明しているフロートの位置とその位置のオフセットに基づいてその真の位置を発生する。
そのフロートが綱の長さを伸ばして操作でき、その一方で大深度で操作できる特性の水中移動体を建造できる。さらにそのフロートは一般的に潜水中の移動体からの信号の高速伝送用無線システムを具備しうる。 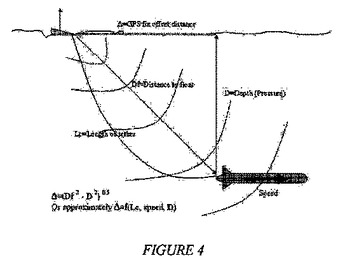 (もっと読む)
(もっと読む)
埋設物探査装置
【課題】地中電路工事などを行う場合、施工図による埋設物位置が違っても目的埋設物を事前に探査して、他の埋設物の破損や危険を防止することが出来る埋設物探査装置を提供する。
【解決手段】携帯送受信機(携帯電話)1、地表付近に設けられた無線中継器3、埋設識別シート6、光ケーブル6等の埋設物に取り付けられた無線ICタグ5からなる埋設物探査装置において、携帯送受信機(携帯電話)1から探査信号を電磁波として送信する。無線中継器3により中継された探査信号を無線ICタグ5が受信すると、無線ICタグ5は探査信号が自身に対するものである場合、識別情報を含む応答信号を電磁波として送信する。無線中継器3は識別情報を表示するとともに応答信号を中継する。携帯送受信機(携帯電話)1は応答信号を受信して解読することにより埋設物の名称などが容易に判別できる。
(もっと読む)
捜し物検知方法及び捜し物検知システム
【課題】 電子タグから発する音波を受けて、外部照明装置から電子タグにスポットライトを当てることにより、捜し物が新聞紙や雑誌等の下などの直接目で見えない場所にあっても、容易に捜し物を検知する。
【解決手段】 捜し物検知システムは、電子タグ20に所定の音波または電波による個体識別信号を送信する発信装置10と、発信装置10からの音波または電波を受信する受信回路r1と、スポットライト33からの光を受光する光センサ22と、光センサ22の出力信号から音波発生器23を制御する制御回路C1と、音波を発生する音波発生器23とを備えた電子タグ20と、スポットライト33と、スポットライト33の照射位置を変化させる照射位置可変手段a1,a2と、音波を受信する少なくとも2つのマイクロフォンM1,M2と、音源までの距離および音源の位置を推定する音源推定回路31と、音波の変化を分析する音波分析回路32とを備えた照明装置30とからなる。
(もっと読む)
超音波を用いた三次元無線位置検出
本発明は、1つの移動式超音波送受信器を備えた移動式無線式構成要素と、所定の間隔を隔てた関係にある複数の固定式超音波送受信器を備えた固定式構成要素との間の位置検出方法を提供し、その方法は、無音時間を設定するために全ての送受信器をオフにするステップ、超音波信号を送信するために1又は複数の固定式送受信器を起動するステップ、通常、信号の送信と同時に、複数の固定式送受信器のそれぞれに対応した複数のタイマーを開始させるステップ、移動式送受信器で信号を受信するステップ、信号の受信に反応して移動式送受信器から信号を送信するステップ、各固定式送受信器で移動式送受信器により送信された信号を受信し、通常、最初の20個の受信されたエッジ、好ましくは最初の10個の受信されたエッジの中から見つけられた1つの受信されたエッジ、より好ましくは最初に受信された立ち上がりのエッジを受信したときに各タイマーを停止させるステップ、音速を表す所定の定数と各タイマーによって測定された各固定送受信器への信号の移動時間に基づいて移動式送受信器と各固定式送受信器の間の距離を演算するステップ、及び固定式構成要素に対する移動式構成要素の三次元位置を測定するために、演算された距離を用いて三角法の計算を実行するステップを備えている。  (もっと読む)
(もっと読む)
アクテイブタグ装置
【課題】発信手段の方向および発信手段と受信手段の距離を精度良く検知する。
【解決手段】発信手段1の指向性アンテナの方向31に対向して受信手段2の指向性アンテナ21a,21bを向け、アンテナ21a,21bを切替えた時に受信した高周波信号のタイミング又は振幅又は周波数又は位相又はこれらの組合わせを検知し、発信手段1の方向や発信手段1と受信手段2の距離を検知する。特定エリアの内部や周辺部に沿って複数の発信手段1又は受信手段2あるいは発信手段1又は受信手段2に接続された複数のアンテナ又は複数の送受波器が設置され、あるいは発信手段1のアンテナ又は送受波器が複数の放射素子を有する漏洩ケーブルであり、漏洩ケーブルが特定エリアに沿って設置され、又は特定エリアを囲い又は区分するように設置される。
(もっと読む)
撮影位置特定システム、撮影位置特定装置及び撮影位置特定方法
【課題】GPSを利用できない環境においても、画像を撮影した位置を正確に求めることができる撮影位置特定システム、撮影位置特定装置及び撮影位置特定方法を提供する。
【解決手段】撮影位置特定装置10aは、撮影指示を取得する入力部11と、撮影指示を取得した場合に被写体を撮影する撮影部12と、少なくとも3台の端末の位置を予め記憶する記憶部17を有し、撮影指示を取得した場合に光を放射する発光部13と、各端末から発信される音波を受信する音波受信部14と、音波を受信した時刻と光を放射した時刻を取得する時刻取得部15を有し、音波を受信した時刻と光を放射した時刻との差と音速とに基づいて各端末までの距離を算出し、各端末までの距離に基づいて自撮影位置特定装置の位置を算出する制御部16を有し、撮影部12による撮影画像と制御部16が算出した自撮影位置特定装置10aの位置とを対応付けて記憶する記憶部17を有する。
(もっと読む)
21 - 40 / 60
[ Back to top ]